月面着陆起飞试验技术研究
2018-11-07 05:37:28任德鹏李青刘振春张旭辉
深空探测学报 2018年3期
任德鹏,李青,刘振春,张旭辉
(1. 北京空间飞行器总体设计部,北京 100094;2. 北京卫星环境工程研究所,北京 100094)
0 引 言
我国的探月工程已经取得了丰富的成果,且不会止步于此,未来必然会开展更深入的科学探测和研究工作——利用月球环境、建立月球基地、开发月球资源。后续的探月任务中都会涉及探测器的月面软着陆和起飞上升,这两个环节的顺利实施是完成探测任务的必要条件,也是探测器研制的关键技术之一。受探测器轨道设计、功率平衡、测控链路等因素的影响,月面软着陆和起飞上升均需探测器自主完成,任务过程均不可逆,期间出现异常地面无法补救处理,因此除了提高探测器的可靠性设计外,还需开展大量的地面试验,对着陆起飞实际飞行过程及探测器的设计状态进行充分验证。
地面环境与月面有较大的差异增加了试验实施的难度,对着陆起飞验证试验而言,重力和大气环境是重点考虑的因素。探测器在地面所受的重力是月面的6倍,仅依靠自身配置的发动机不能满足探测器的受力平衡,无法实现飞行过程的模拟;地面存在大气背压,燃烧室产生的燃气流不能充分膨胀,导致发动机推力输出降低,进一步恶化了探测器的受力状态;此外,地面试验中探测器的运动或空气的自然流动都会对探测器产生风阻或风载干扰,增加了控制的复杂性。着陆起飞验证试验必须分析和解决存在的问题和难点,实现对探测器真实飞行过程的验证。
本文在对探测器月面着陆起飞设计要点分析的基础上,对地面试验的关键因素进行了汇总,提出了一种验证方案,并对其实施的可行性及拓展应用进行了说明,相关内容可为后续我国月球及其他行星表面探测器的研制提供借鉴。
1 探测器着陆起飞设计要点分析
以美国“阿波罗”登月及“星座”计划飞行方案[1-2]为例,探测器月面软着陆可分为主减速段、姿态调整段、接近段、悬停段和垂直下降段5个飞行阶段,月面起飞上升可分为起飞准备段、垂直上升段、姿态调整段和轨道射入段4个飞行阶段,分别如图1~2所示。

图1 探测器月面软着陆飞行过程示意图Fig. 1 Illustration for soft landing process of a lunar probe

图2 探测器月面起飞飞行过程示意图Fig. 2 Illustration for launch process from the moon of a lunar probe
文献[3]对探测器月面着陆和起飞过程各飞行阶段的具体任务进行了详细说明,简述如下。
1)软着陆飞行过程
(1)主减速段,主要完成探测器的制动,减小其飞行速度和高度。
(2)姿态调整段,调整探测器的飞行姿态,使光学成像敏感器逐步对准飞行航迹的正前方。
(3)接近段,光学成像敏感器对月面拍图,通过图像识别初步选定安全着陆区并经避障飞行至着陆区上方。
(4)悬停段,探测器保持与月面垂直的姿态悬停在着陆区上方,利用三维成像敏感器扫描月面地形,通过搜索运算找出最优的安全着陆点。
(5)垂直下降段,以识别的安全点为目标,经避障飞行至目标点正上方,到达设定高度后关闭发动机,探测器以自由落体方式降至月面。
整个软着陆过程探测器主要依靠陀螺、加速度计进行惯性导航,利用导航敏感器测量相对月面的飞行参数进行导航修正并根据设定的控制律进行闭环控制,因此多种敏感器测量数据的信息融合及导航算法[4]是该环节的设计要点;此外,在接近段和悬停段,探测器需要完成月面地形拍摄并识别出安全着陆的区域,安全区识别算法也是软着陆过程的设计要点。
2)月面起飞飞行过程
(1)起飞准备段,主要完成探测器的定位及射向对准,获得月面坐标系中的位置和姿态,由此设定起飞的控制参数。
(2)垂直上升段,发动机点火探测器起飞,但在初期不控制飞行姿态,待探测器脱离影响区域后启动控制,修正初始偏差将飞行姿态调整为与月面垂直。
(3)姿态调整段,按起飞前装订的参数调整俯仰角,以获得轨道射入所需的速度和角度。
(4)射入段,探测器加速飞行,直至发动机关机进入环月轨道。
月面起飞过程探测器没有配置测量敏感器,依靠起飞前的初始参数进行导航[5],提高初始位置精度对后续飞行有重要影响,是该环节的设计要点;此外,发动机点火起飞后经一段时间探测器才对其飞行状态进行控制,考虑初始起飞姿态、起飞过程中各种干扰因素的影响,启控时探测器飞行参数有很大的随机性,适应并消除随机条件和干扰,使探测器垂直月面起飞需要对控制方案及控制参数进行优化,也是起飞过程的另一项设计要点。
上述分析可见,制导导航与控制技术是探测器月面着陆起飞的设计核心,其中着陆过程设计的重点是悬停段以后的飞行过程、起飞过程设计的重点是射入段之前的飞行过程。
2 着陆起飞试验关键因素分析
根据探测器月面着陆起飞设计要点,对地面试验的关键因素分析如下。
2.1 探测器飞行状态模拟
着陆过程中探测器的飞行控制与其高度、速度等参数密切相关,因此试验中需模拟探测器真实的飞行曲线和运动状态;而起飞过程中探测器不测量其飞行参数仅使用初始位姿数据进行导航,其飞行控制仅与时间密切相关,因此试验对探测器实际飞行曲线的模拟要求相对不高。
2.2 低重力环境模拟
低重力环境模拟的实质是对探测器月面状态的受力状态进行模拟,常见的方法有反冲火箭法、降落伞法、浮力法等[6],其原理都是为探测器施加一个与重力方向相反的作用力,平衡其地面的部分重力。各方法都有不同的局限性,其中“塔架吊绳模拟法”是目前唯一被用于探测器月面着陆验证的方法。美国“阿波罗”工程配套的LLRF(Lunar Landing Research Facility)试验系统[7]就是典型代表,它利用塔架吊绳为探测器施加一个恒定向上的拉力平衡其部分重力,依靠对发动机的控制保证试验中探测器受力状态与月面一致,从而模拟了探测器飞行的速度、加速度等参数。我国月面探测器的研制中也建设了专用的试验系统[8],其原理与LLRF类似,该系统同样能够用于起飞过程的验证。
“塔架吊绳模拟法”最大的缺点是试验空间受限,且试验中探测器的运动容易受吊绳拉力及垂直角控制精度的干扰。此外,为提供探测器运动的自由度并实现与塔架的对接,探测器需要万向吊具的支持,为降低干扰作用吊具需安装在探测器纵向质心位置处,一旦与控制坐标系不重合将导致探测器俯仰和偏航的控制无法解耦,增加了试验数据分析及结果评估的难度。可见,地面试验仍需改进探测器受力状态的模拟方法。
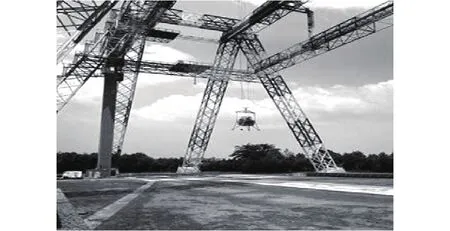
图3 LLRF 试验系统示意图Fig. 3 Illustration for the LLRF test system
2.3 大气及风阻干扰因素处理
地面环境中的大气会影响发动机的工作,并会在探测器运动过程中产生一定的阻力。缩短发动机的喷管尺寸,使之工作参数与大气背压匹配能够保障发动机地面正常工作;选择无风天气条件下进行试验能够降低风载阻力,而风阻的影响一般不予补偿,可将其处理为对控制验证的加严考核项目。
3 试验方案
探测器月面着陆起飞设计需要模拟飞行过程实现对制导导航与控制的充分验证,地面试验也需要解决环境因素的影响问题。本文通过试验技术的研究提出了一种验证方案,较好地处理了试验关键因素并满足试验需求。
3.1 试验概述
研制通用的着陆起飞验证平台(以下称“验证器”),验证器干重320 kg,由结构、GNC(Guidance,Navigation and Control)、推进、数管、供配电等分系统组成,并配有小型着陆缓冲机构保证着陆安全,验证器由蓄电池供电,与地面总控采用无线链路进行通信。验证器上配置了1台7 500 N变推力发动机,依靠发动机的推力控制自主完成起飞及着陆,其推进剂最大加注量75 kg,能够提供不低于35 s的点火试验时间。地面采用光电跟踪设备对验证器的位移、速度、姿态等飞行参数进行测量,与验证器下行的遥测进行综合分析,对试验进行综合评价。
该方案的原理是降低验证器重量并配置大推力发动机,不需要外力辅助实现飞行过程模拟。尽管试验中发动机推力输出与真实月面不同,但不改变探测器的控制律,因此该方案不影响对制导导航控制的验证。由于没有试验空间的限制,验证器飞行高度可超过150 m;验证器没有万向吊具和吊绳等附加装置,能够简化试验数据的分析,使试验效果更明显。
3.2 试验过程说明
月面着陆及起飞过程中探测器的飞行参数不重合,因此无法依靠单次试验实现对两个过程的同时验证,着陆及起飞试验过程分别如图4~5所示。

图4 着陆验证过程示意图Fig. 4 Illustration for the landing validation process

图5 起飞验证过程示意图Fig. 5 Illustration for the launch validation process
着陆验证试验中,发动机点火验证器垂直起飞,当飞行高度大于50 m后验证器开始减速,当垂直速度降为0时验证器达到最高点,此时的飞行参数与月面软着陆悬停段匹配,后续验证器按软着陆过程执行悬停平移及缓速下降飞行,直至发动机关机探测器降至地面。由于起飞上升不是有效的试验阶段,且过程中消耗了部分推进剂,验证器质量能够保证后续着陆段的飞行曲线与真实过程一致。
起飞试验包括垂直上升、姿态调整、制动下降和缓速下降4个环节,其中垂直上升与姿态调整段飞行与月面起飞过程相同。完成调姿后验证器有一定的水平速度,为节省推进剂在随后制动下降段验证器以先减速后加速的方式飞行至10 m高度处,此时其水平速度减为0。验证器再以1.5 m/s的速度匀速下降,并在1 m高度处关闭发动机验证器着陆地面。该试验中起飞和姿态调整段是有效的试验阶段,由2.1节分析可知,即便起飞段验证器的加速度与真实过程不一致也不影响试验目的。
着陆和起飞试验中验证器均按设定的程序自主完成飞行,但必要时地面可以发送遥控指令对验证器进行干预控制,以提高试验的可靠性和安全性。
3.3 试验仿真验证
建立了验证器的动力学模型,采用与探测器相同的导航及控制方式,对着陆及起飞过程开展了仿真分析。图6~7分别为着陆试验过程中验证器位移及姿态的仿真结果。
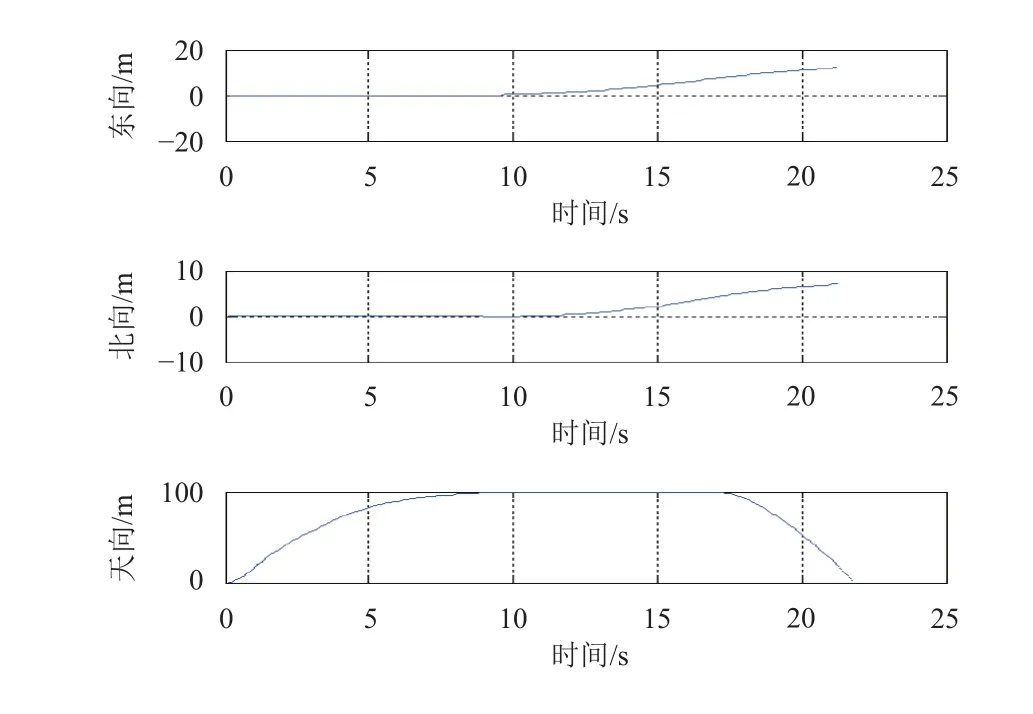
图6 着陆过程验证器位移仿真结果Fig. 6 Displacement simulation results of the validator during the landing process

图7 着陆过程验证器姿态控制结果Fig. 7 Attitude control results of the validator during the landing process
由图6~7可见,发动机点火后验证器垂直起飞经8 s的飞行到达100 m高度处,过程中验证器保持垂直状态没有发生姿态偏转和水平方向的运动;8~17 s验证器保持悬停高度并进行平移飞行,仿真中设定的目标点位于初始位置偏东10 m、偏北5 m处,验证器的飞行方向正确,期间验证器姿态变化小于2°;17 s后验证器开始缓速下降,直至接近地面高度处发动机关机。
图8~9分别为起飞试验过程中验证器位移及姿态的仿真结果。由图可见,在起飞10 s时验证器进入姿态调整段,随后验证器偏航角逐渐由0°被调整至6°同时产生水平向的位移;13 s后验证器进入制动下降段飞行,随后为消除水平运动速度,验证器偏航角开始向负方向调整,20 s后重新保持水平状态,验证器最终降落点相距起飞点不超过2 m。

图8 起飞过程验证器位移仿真结果Fig. 8 Displacement simulation results of the validator launch the landing process
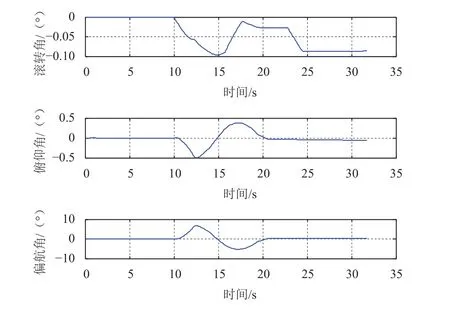
图9 起飞过程验证器姿态控制结果Fig. 9 Attitude control results of the validator during the launch process
仿真结果表明:验证器的飞行过程与设计相符,整个过程中其姿态受控,试验设计合理可行。
4 试验应用分析
本文提出的试验方案可以模拟月面着陆起飞过程中探测器的运动状态,实现对探测器设计要点及其工作性能的综合验证。此外,该方案还在以下两个方面具有拓展验证的价值。
1)月面着陆点调整验证
为提高探测器对月面环境的适应能力、拓展探测任务、提高探测效率,需要探测器在完成首次月面着陆后还具备点火起飞再次更换着陆点的能力。这与本文着陆验证的实施过程相似,验证器几乎不需改装即可完成该过程的验证。通过试验,可掌握不同着陆姿态及边界条件下,探测器着陆点调整飞行的最优控制参数,完善过程设计达到预定的目标。
2)亚轨道航天器着陆起飞技术验证
亚轨道飞行器指的是能够抵达临近空间的顶层,但速度尚不足以完成绕地球轨道运行的飞行器。它兼有航空和航天飞行器的特点,近年受到各航空大国的青睐[9],正逐步发展为21世纪世界航天航空事业的一个重要方向。按起降飞行形式的不同,亚轨道航天器可分为滑行起降式和垂直起降式两类。“X-Pixel”是垂直起降式亚轨道航天器的典型代表,它使用火箭发动机,以自身携带的燃料满足全程飞行中的动力需求。其飞行包线一般为:首先以垂直的方式升空并加速,上升至一定高度后再进行水平飞行;降落的方式与起飞过程相反,依靠发动机变推力控制最终降至地面。
可见,本文提出的验证器初步具备亚轨道航天器的特点,月面着陆起飞试验本身也能够初步掌握大气环境对探测器控制的影响,提高亚轨道航天器的设计能力,后续通过技术改造提高验证器的飞行高度、距离和速度,使之成为我国亚轨道航天器的探路者。
5 结束语
本文在对探测器月面着陆起飞设计要点分析的基础上,提出了一种地面试验方案并对方案的可行性进行了仿真验证。该方案能够满足探测器月面着陆起飞的验证需求,同时对后续探测器月面着陆点调整设计及亚轨道航天器设计有拓展验证的价值。
猜你喜欢
学生天地(2020年3期)2020-08-25 09:04:16
小学科学(2020年1期)2020-02-18 06:26:40
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
小学科学(2019年12期)2019-01-06 03:38:45
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
太空探索(2015年1期)2015-07-18 11:02:13
太空探索(2014年12期)2014-07-12 15:17:12
太空探索(2014年11期)2014-07-12 15:17:00
太空探索(2014年9期)2014-07-10 13:06:30