手持式三维激光扫描仪数据拼接技术与实践
2018-11-05 05:59:46倪春杰胡彦萍
机械研究与应用 2018年5期
倪春杰,胡彦萍
(兰州石化职业技术学院,甘肃 兰州 730060)
0 引 言
逆向工程也称作反求工程,是一种产品外形设计的再现过程[1],广泛应用于汽车、模具、雕刻等行业。逆向工程技术包括数据采集、数据拼接、后期处理等。实物或模型的数字化采集是逆向工程的首要而关键的一步,如何快速而又准确地采集数据至关重要。数据采集的方法很多,手持式三维激光扫描仪因其采集速度快、精度高、便于携带,对环境要求不高, 扫描仪和扫描物体的相对位置都可以变换等特点,大大提高了扫描范围和不同场合的扫描可行性,目前在各个行业广泛应用,尤其在逆向工程、工业设计、三维检测、艺术创作等领域[2-5]。由于扫描仪相机的视场有限和存在遮挡现象,难以一次实现物体的完整扫描,需通过变换角度摆放物体,多次扫描获得多个扫描文件,再利用匹配技术实现多视拼接,补充数据的缺漏,从而得到较完整的三维扫描数据。吴江[6]、熊汉伟等人[7]通过Geomagic Studio软件中的点云对齐功能“最佳拟合对齐”实现了点云数据的拼合。常影等人[8]、李卫民等人[9]、梁云波等人[10]提出了基于标志点的点云数据的拼合。笔者研究分析了形创Handyscan300手持式三维激光扫描仪(如图1所示),及随附的专业数据采集优化软件VXelements的数据拼接技术,总结了三角网格面数据的拼接方法,并用3D打印手段验证了数据拼接的可行性,分析了特征拼接和标志点拼接的特点,为优质高效的获得三维扫描数据提供一定参考,对创新人才的培养具有实际意义。
1 Handyscan 3D扫描系统
Handyscan 3D扫描主要是利用扫描仪的激光发射器发射激光,把光打在物体表面,通过接收物体表面反射的光线获取该物体的三维坐标信息,并在计算机里实时虚拟化扫描形面。扫描仪获得的数据可实现自动三角网格输出,经Geomagic等软件进行简单的后期处理就能直接使用,扫描精度可达0.04 mm。
2 VXelements软件的扫描数据拼接方法
Handyscan300手持式三维激光扫描仪有三种扫描方式,即扫描表面、扫描定位标点和扫描点云,下面对扫描表面和扫描定位标点的数据拼接方法进行分析和实践。
2.1 特征拼接
以恐龙玩具(如图2所示)为例,当物体较小,并有较多明显特征时,可采用扫描表面及无标志点的特征拼接方法。

图1 Handyscan300手图2 恐龙玩具 持式激光扫描仪
2.1.1扫描表面
扫描前需将物体放置在周围贴有辅助定位标点的环境中。扫描表面流程为(如图3所示):选择VXelements 软件“扫描”方式中的“扫描表面”→在保持定位标点和物体的位置关系不变的情况下开始扫描→实施扫描→结束扫描→编辑扫描,删除扫描目标以外的噪点、提高分辨率等→退出编辑扫描,保存任务为csf文件。变换角度重新摆放物体,重置项目,扫描,编辑扫描,获得第2个、第3个等多个文件。
扫描过程中,观察VXelements上的条状计量器,判定扫描仪与被扫描件之间的距离是否合适,在绿色时的距离范围内扫描。如果扫描区域内的定位标点点数不足4个点,虚拟模型会出现静止不动的情况,需要重新调整扫描仪位置,直至计算机屏幕上的可视化虚拟模型恢复动态显示时继续扫描。
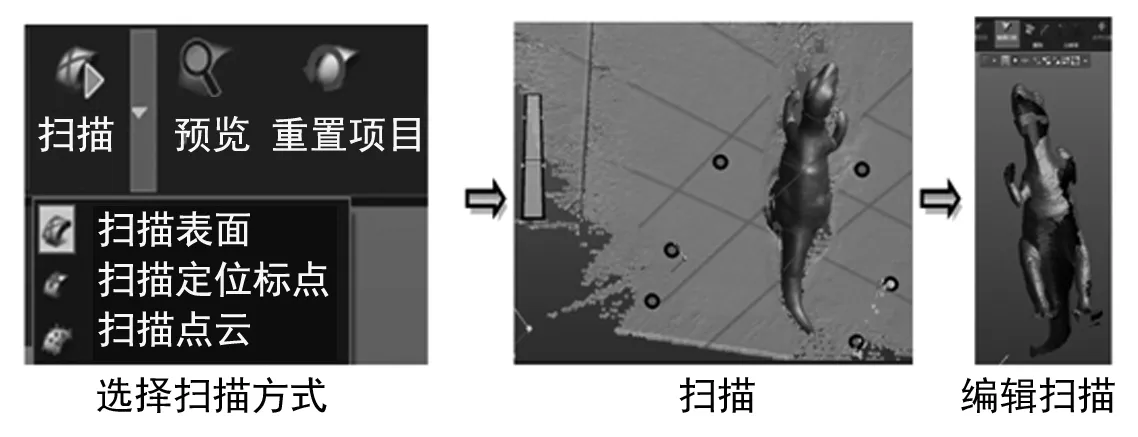
图3 扫描表面流程
2.1.2合并扫描
特征拼接如图4所示。
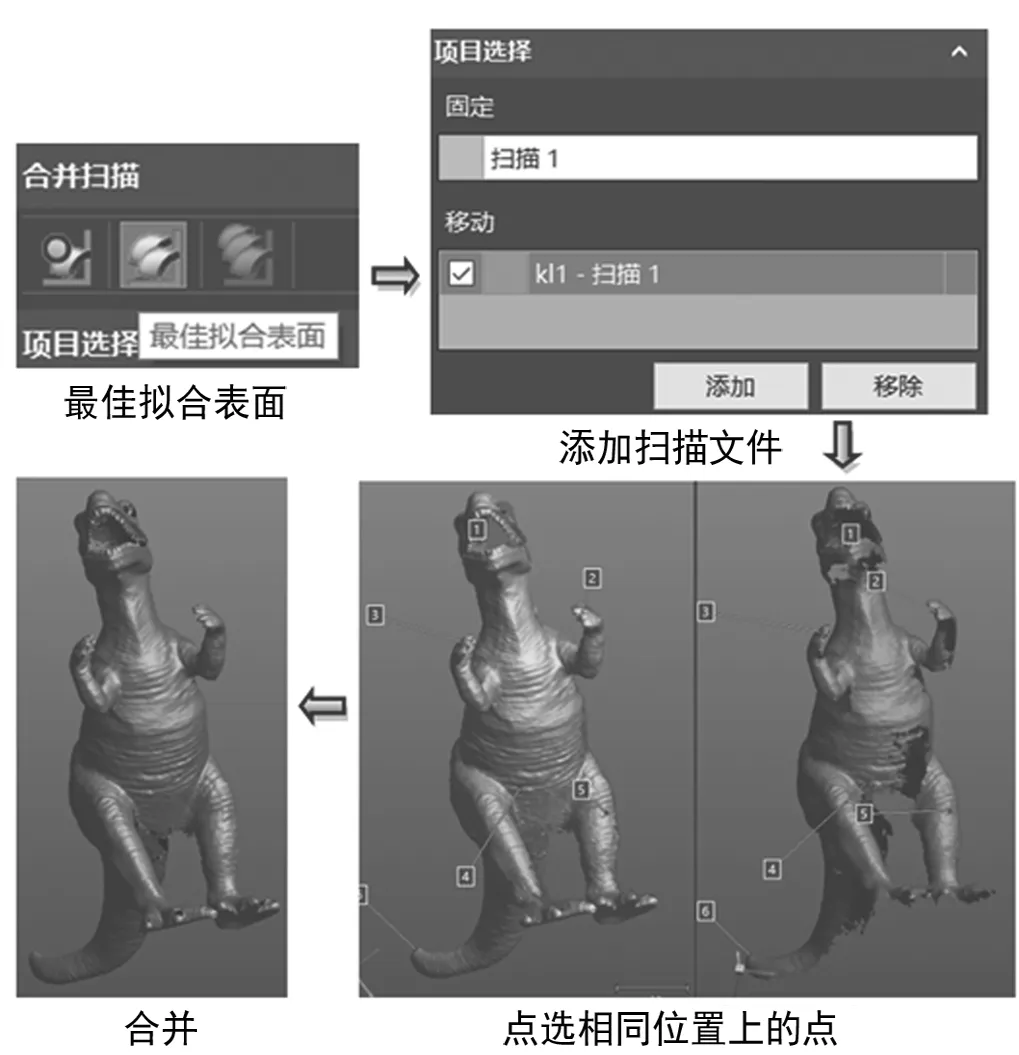
图4 特征拼接流程
打开某个已保存的扫描任务文件→点击“合并扫描”→选择“最佳拟合表面”(第2个图标)→点击项目选择中的“添加”,在存储文件夹中选择预合并的扫描文件,文件被调入,软件自动分两屏显示→在固定数模上选择至少3个点,在移动的数模上点选相同位置上的点→选择“最佳拟合”→合并,保存。经过多个任务的扫描(缺哪里扫哪里)、合并,最终获得较为完整的扫描数据,保存为csf文件及stl文件。
2.2 标志点拼接
扫描前先在物体表面贴上标志点,标志点的粘贴应注意以下几点:
(1) 为得到较完整的物体扫描数据,需要对物体四周及上下两面都进行扫描,应保证4个以上的公共标志点,间距2~10 cm,避免近似直线。
(2) 标志点主要贴在大平面或者大曲面上,不遮盖复杂特征,不贴在拐角处,离开边缘12 mm以上。
(3) 当曲面较小无法粘贴足够的标志点时,可在环境周围贴辅助标志点,保证扫描过程中最少有4个公共标志点。
2.2.1扫描表面的标志点拼接
当被扫描物体有较大的表面或者特征不明显时,可采用扫描表面及标志点拼接方法,以鼠标为例,标志点已贴好(如图5所示)。
(1) 扫描表面:将鼠标底面朝下正常摆放,扫描鼠标表面,删除鼠标之外的噪点,删除鼠标之外的辅助标志点(如图6所示),获得扫描文件1。重置项目,将鼠标侧放,第二次扫描,获得扫描文件2。注意:当零件与标志点的相对位置有变化时,需删除物体表面之外的所有辅助定位标点。本例进行了4次改变摆放角度的扫描。

图5 鼠标实物图6 删除标志点
(2) 扫描表面标志点拼接(如图7所示):打开扫描文件2→点击“合并扫描”→选择“目标最佳拟合”(第1个图标)→点击项目选择中的“添加”,在存储文件夹中选择扫描文件1→“最少匹配点”处设置4个点→对齐→接受→合并,保存文件。经过4个文件的扫描、合并,最终获得较为完整的扫描数据,保存为csf文件及stl文件。
2.2.2整体框架标志点拼接
(1) 扫描整体标志点:选择“扫描”方式中的“扫描定位标点”,此时,屏幕上只看到了扫描的标志点,与鼠标实物上贴的标志点对照,删除鼠标表面之外的辅助标志点。换个角度摆放鼠标继续扫描,补充其他表面的标志点后得到鼠标表面所有标志点,删除鼠标表面之外的标志点。导出数据到文件→扫描定位目标→保存为txt文件,操作流程如图8所示。此文件记录的是物体整体框架标志点的空间位置关系。
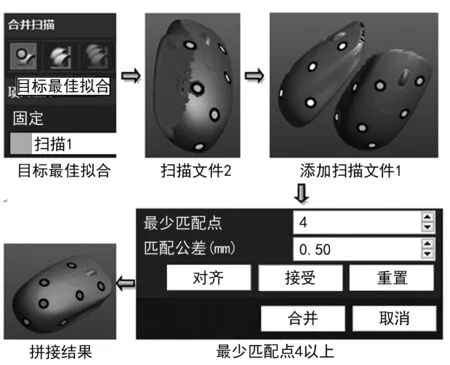
图7 扫描表面标志点拼接流程
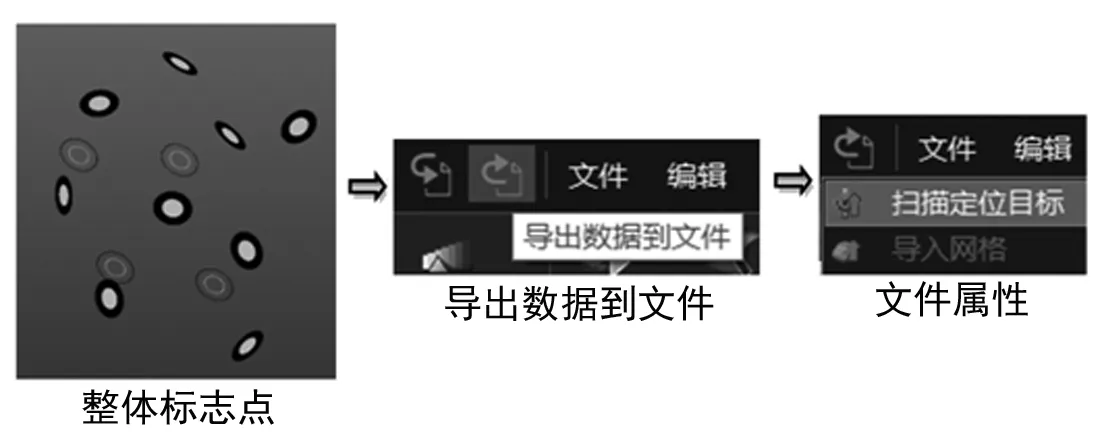
图8 整体框架标志点导出流程
(2) 扫描表面:重置项目,多角度多次扫描鼠标表面,方法同2.2.1。
(3) 整体标志点拼接:重置项目,在当前会话选择要导入的数据→导入定位标点→打开上一步保存的txt文件。合并扫描→选择“目标最佳拟合”→添加扫描文件1→对齐→接受→合并。再添加扫描文件2、3、4等进行合并,最终获得较为完整的合并扫描数据文件,保存为csf文件及stl文件。
从扫描的合并模型中不难发现,三维激光扫描仪在扫描恐龙嘴内部形状和扫描鼠标底面的光电槽时,扫描数据缺失较多,出现了较大的孔洞,应采取机械测量方法进行弥补[11]。
3 后期处理
Geomagic Wrap扫描数据处理软件是原Geomagic Studio的简化版本,对扫描模型的后期处理拥有强大的逆向建模功能,可以对扫描模型进行修复或补孔,最后获得完整的扫描模型数据文件。本文采用Wrap软件的网格医生对扫描模型进行了自相交、高度折射边、钉状物、小组件、小孔的自动修复,还进行了较大孔洞的填充等简单后处理,调入文件时直接打开前期保存的stl文件。
4 3D打印验证
处理后的扫描文件既可以输出到3D打印机,也可以输出到数控加工系统[12]、3D检测[13]等下游终端。本文使用的是Einstart-S型3D打印机,原比例打印了恐龙模型(如图9所示),缩小到80%打印了鼠标模型(如图10所示)。结果,打印样件与原模型具有较高的相似度,表明上述的数据拼接方法是可行的、有效的,也是十分实用的。

图9 恐龙玩具打印结果 图10 鼠标打印结果
5 结 语
通过2个实物的三维扫描,本文得出结论:手持式三维激光扫描仪精度高,速度快,使用方便,三种数据拼接方法各有特点:
(1) 特征拼接,基于物体自身的特征完成拼接,无需在物体表面贴标志点,可避免特征被标志点遮盖,特征相对完整。但是,由于特征拼接点无法准确地实现“点选相同的位置”,点与点之间的误差会使某些特征出现间隙或分层,影响扫描精度,常用于小型、特征较多、精度要求不高的物体的数据拼接。
(2) 扫描面标志点拼接,基于扫描面标志点的空间位置不变性,是扫描文件间的两两拼接,两拼接表面要有4个以上的公共标志点,拼接精度较高,被标志点遮盖部分的三维形貌系统会自动光滑填充。但是,此方法累积误差较大,影响物体的扫描精度,常用于较大型物体的扫描拼接。
(3) 整体标志点拼接,基于整个模型上标志点的空间位置不变性,是扫描文件与整体定位目标txt文件之间的拼接,用于拼接的表面有不少于4个的标志点,累积误差小,扫描时间短,且拼接文件小,非常适合于较大型物体的实际扫描拼接。
猜你喜欢
计算机测量与控制(2024年2期)2024-02-29 04:22:22
小学生学习指导(低年级)(2021年12期)2021-12-31 08:09:26
辽宁省博物馆馆刊(2021年0期)2021-07-23 07:27:08
小学生学习指导(低年级)(2020年9期)2020-11-09 09:11:22
测控技术(2018年12期)2018-11-25 09:37:20
传感器与微系统(2018年7期)2018-08-29 00:44:24
作文大王·低年级(2016年1期)2016-02-29 00:37:10
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
现代营销·经营版(2015年3期)2015-04-20 06:46:58
计算机工程与设计(2014年9期)2014-12-23 01:16:00