
自升式海洋平台液压升降机构控制与实现
2018-10-31 08:50陆健,沈炜
机电设备 2018年5期
陆 健,沈 炜
(南通航海机械集团有限公司,江苏南通 226003)
0 引言
升降机构是自升式升降平台的主要组成部分之一,升降系统的可靠性是平台顺利实现升降的保证。研究升降系统,对提高平台的整体安全性能、提高海上作业效率、避免危害性事故等有着非常重要的作用[1]。
本文研究的平台为钢质四桩腿自升式海洋平台,海洋平台的升降机构为液压环梁插销式升降机构。升降机构安装在桩腿和平台主体的交接处,可使桩腿和平台主体作上下相对运动。插销装置可使桩腿和平台主体相对固定。海洋平台的 4根带桩靴的桩腿站立在水底的底层上,把平台托离水面,使平台在施工时不受海流及波浪的影响,从而使海上作业在稳定的工作平台上展开[2]。
平台升降机构控制系统采用分布式控制系统,能实现4根桩腿的单独控制和协同控制。系统选用PLC作为控制器,在各个升降桩腿配置从站,以触摸屏作为人机对话操作界面。系统使用以太网,在中央控制台配置工控机,通过组态软件开发监控系统,实现人机交互。平台和桩腿的升降可自动实现,系统可对升降全过程进行监控。
1 升降机构介绍
自升式海洋平台液压升降机构由 1套独立的液压驱动系统提供动力,其能够克服泥土、砂石等带来的阻力和升降平台自身的重力,将桩腿插入/拔出海床以及实现平台的上升和下降。
液压升降机构分别安装在平台的 4个角上,每套升降机构由桩腿、上环梁、插销机构、主油缸和下环梁等组成[3]。上环梁固定在平台上,下环梁为动环梁,通过上下两组插销机构交替伸缩,配合主油缸的伸缩,实现桩腿下放、平台上升、平台下降和拔桩4个过程。插销机构主要由插销、插销油缸、进到位水平限位开关和退到位水平限位开关组成。主油缸上安装位移传感器和限位开关。升降机构结构如图1所示。

图1 升降机构结构示意图
2 控制与实现
2.1 升降机构动作分析
液压升级机构控制主要研究的问题是通过研究上、下环梁与对应插销轮番插入和脱开及升降油缸的伸缩的动作原理设计来实现放桩、平台举升、平台下降、拔桩等功能[4]。
1)放桩。此时平台处于漂浮状态,放桩过程装置受力为桩腿的重力。主油缸缩回,下面的动销插入桩腿,上面的定销拔出,主油缸伸出,使桩腿下放,通过安装在主油缸上的位移传感器检测行程,当行程为1 400 mm时,定销伸出,定销在桩腿表面滑行,当形成为1 500 mm(桩腿节孔距离)时,定销插入桩腿,桩腿停止下放,拔出动销,主油缸空行程缩回1 500 mm时再插入动销拔出定销,重复以上过程使桩腿自动下放。
2)平台上升。此时平台处于上升状态,吃水变浅直至离开水面达到工作位置,平台上升过程装置受力为平台的重力。主油缸缩回,下面的动销插入桩腿,上面的定销拔出,主油缸伸出,通过桩腿和平台的相对作用使平台上升,通过安装在主油缸上的位移传感器检测行程,当行程为1 400 mm时,定销伸出,定销在桩腿表面滑行,当行程为1 500 mm时,定销插入桩腿,停止动作,拔出动销,主油缸空行程缩回1 500 mm时再插入动销拔出定销,重复以上过程使平台上升到预定的工作位置。
平台下降和拔桩的动作分析与以上分析类似。
2.2 平稳实现上、下插销交替动作的分析
上、下插销正常交替动作,平稳实现平台重力负荷的转换,是升降机构控制的关键。
放桩时,因为销子所受的力为桩腿的自重,所以销子的上壁面为受力面。定销转动销时,升降油缸要微缩,以便于定销拔出;动销转定销时,升降油缸要微伸,以便于动销拔出。
由上述分析可知:顺利实现上、下插销交替动作的关键是在上、下插销转换时控制升降油缸的微伸或微缩。在升降机构控制系统中,由电液比例控制阀组成的比例控制系统可以实现升降油缸的微伸或微缩。电液比例控制系统是指使用比例控制元件的液压控制系统。比例控制元件是实现系统的输出与输入之间对应线性关系的部件,通过比例控制输入量来确定输出量的大小,使输出量按确定的比例随输入量的变化而变化。液压比例控制系统结构框图如图2所示。

图2 液压比例控制系统结构框图
电液比例阀以液压控制阀为基础,使用电能驱动机械动作的转换装置,将电信号转换为阀芯的位移信号,按输入电信号指令连续成比例地控制液压系统。图2中,位移传感器检测上、下插销相对的位置信号,同时把位置信号进行A/D转换并反馈给控制系统,该反馈信号与输入指令信号进行比较后,可用于控制电液比例阀的电磁铁,从而控制阀的开口大小,调节液压驱动液压缸动作,以此实现对升降油缸的控制[5]。
当上、下插销需要交替动作同时转换上、下插销所承受的负荷力时,液压缸内安装的位移传感器采集油缸活塞杆的运行位置信息并实时反馈给 PLC,通过PLC内部算法运算,将控制指令发送给控制油缸微伸或微缩的电液比例阀,通过电液比例阀阀芯移动最终实现上、下插销交替动作控制。该液压控制回路通过PLC对阀芯位移实现闭环控制。
2.3 升降机构的软件设计
根据平台工作原理,设计人机操作画面。对人机交互操作画面的主要要求是:能显示平台的状态、能比较方便地操作按钮、能切换平台操作模式、能监控控制系统参数等。本文以“华电 1001”海上自升式风电安装平台液压升降机构的控制为研究对象,选用施耐德Premium TSX P572634M型PLC作为升降机构主控制器,配TSXCPP110模块用于接收平台的纵横倾传感器倾斜信号,通过组态软件开发监控系统,实现对平台和桩腿升降的控制和监控,并配备施耐德XBTGT触摸屏用作人机对话操作界面。开发设计的桩边控制画面如图3所示。
3 结束语
本文以自升式海洋平台的升降机构为研究对象,分析了升降机构的工作原理和控制难点,并提出对应的解决方案。该升降机构使用基于以太网总线的 PLC系统,人机开发界面操作简单,能很好地满足控制要求。本文的分析和研究可为类似的海洋平台升降机构提供借鉴,具有一定的参考价值。
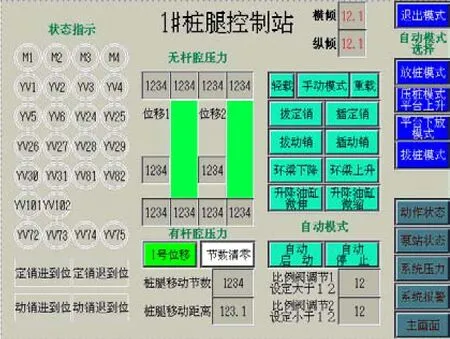
图3 桩边控制画面
猜你喜欢
四川建材(2022年8期)2022-08-30
北京航空航天大学学报(2022年6期)2022-07-02
服饰导报·鞋世界(2021年10期)2021-12-22
山西建筑(2021年21期)2021-10-26
施工技术(中英文)(2021年16期)2021-10-22
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
销售与市场(营销版)(2020年3期)2020-03-24
中华建设(2019年5期)2019-07-05
现代家电(2016年16期)2016-10-19
