PMSM无传感器模型参考模糊自适应系统*
2018-10-26 05:59:22张相胜田佳文刘敏杰
传感器与微系统 2018年11期
张相胜, 田佳文, 刘敏杰, 潘 丰
(轻工过程先进控制教育部重点实验室 江南大学,江苏 无锡 214122)
0 引 言
传统的基于模型参考自适应的永磁同步电机(permanent magnet synchronous motors,PMSM)矢量控制系统在转子的转速、位置观测以及参数辨识中都具有较好性能[1,2]。但系统仍然存在强烈依靠观测器的缺点,当电机参数或者工况发生改变,系统模型也会随之变化,难以实现最佳性能。文献[3]提出一种定子电阻观测器以弥补不足,但该方法会影响系统响应速度。
模糊逻辑算法具有不依赖参数的特点,将其与模型参考自适应系统相结合,能够从根本上解决传统算法存在的参数依赖问题[4~7]。文献[4]提出一种将二阶滑膜与模型参考自适应系统(model reference adaptive system,MRAS)相结合的电机转速测量方法,该方法能有效克服系统中的电流谐波影响,但二阶滑膜结构使得系统复杂度提升,运算量加大。相较而言,模糊系统结构简单,计算量小,文献[5]提出一种将多状态统一输入的模型参考模糊自适应控制方法,该方法实现了降低系统运算量的功能,但其控制器共有七个逻辑子集,模糊蕴涵关系过于复杂,大幅降低了隶属度函数的校验成功率。
本文提出一种基于定子电流模型的双极式模糊逻辑控制系统,利用模糊逻辑单元替换传统模型参考自适应系统结构中的比例—积分(proportional-intergral,PI)调节器,能够有效降低系统参数的耦合性,提高转子转速跟踪能力,且优异的自适应能力使其在工况改变时也能有效减小转速误差。
1 模型参考自适应系统机理分析
模型参考自适应系统可精确测量定子dq轴电流和转子转速,该系统包含参考模型和可调模型两部分。参考模型用来描述被控对象的已知定量值,可调模型作为模糊自适应机构用于根据给定值产生期望输出。参考模型的已知定量值与可调模型的期望输出进行对比,两者的差值作为误差信号输入自适应机制中,再将由此得到的转子转速估测值反馈到可调模型。图1为模糊自适应算法估测转子转速的结构框图。

图1 模型参考自适应系统结构框图
设dq轴为PMSM的旋转坐标系,该坐标系下电机数学模型为
(1)
式中vd和vq分别为定子电压的d,q轴分量;Rs和Ls分别为定子的电阻值、电感值;ωr,ψr分别为转子转速、转子磁链。矩阵形式为

(2)

系统可调模型数学方程为

(3)
根据Popov稳定性判据,得出系统串联模型为
(4)
可知,当D=I时,v=Ie=e。根据Popov超稳定性理论[8],当系统满足下面2个条件时,系统具有渐进稳定性:
1)状态矩阵H(s)=D(sI-A)-1严格为正实数;
结合上述分析,得出算法数学模型为
(5)
式中id,iq由参考模型所得,d,q由可调模型根据给定值计算得到。
2 模型参考模糊自适应系统设计
如图2所示,传统的模型参考自适应系统参数受系统运行状态影响。而将其与不依赖参数的模糊控制系统相结合后,新系统响应能力提升,稳态误差降低。

图2 2种系统自适应结构框图对比
模糊系统结构简单,通过使用模糊控制系统能够减少算法迭代次数,达到降低计算量的目的。在常用模糊逻辑控制系统中,规则总数随着输入参数的增加急剧增长,本文采用一种多级串联结构,可使系统规则总数线性增长。
本文所提的模糊自适应结构分为2个单元,分析系统各输入参数相关度,将高相关度变量从第一级单元输入,低相关度变量从第二级单元中输入。为了更好地调节系统性能,在每个单元中引入辅助增益系数。双输入控制器较传统单输入控制器,控制规则更简单,规则总数也有所减少[5]。
本文所采用的模糊控制系统共含有e1,Δe1,Δe23个输入变量。根据定义式可知,Δe1是一个关于e1变化的量;Δe2是一个关于e2的变化量
e1=id(k)-d(k),e2=iq(k)-q(k)
(6)
Δe1=e1(k)-e1(k-1),Δe2=e2(k)-e2(k-1)
(7)
表1为根据3输入变量列出的模糊系统规则表。其中每个输入变量都有正(P)、负(N)、零(Z)3种状态。图3为系统结构,本文采用双极式的模糊控制系统,每个单元都含有2个输入变量,第一单元的两输入变量分别为e1和Δe1,其输出变量Δu1及Δe2作为第二单元的输入变量。
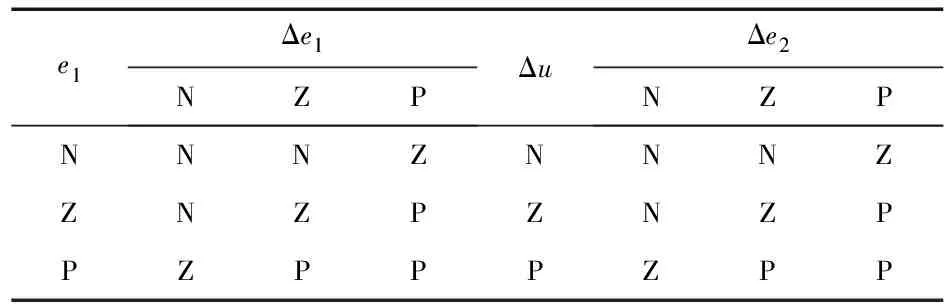
表1 子系统的模糊逻辑规则
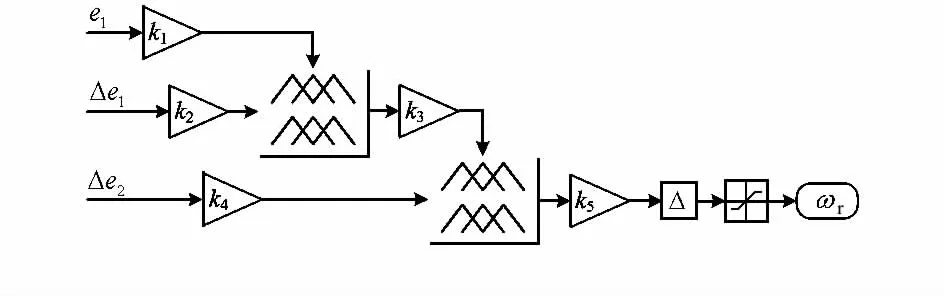
图3 两级模糊系统结构示意
图3所示k1~k5分别为对应输入输出的辅助增益,目的是为了提升系统性能,其值需根据现场具体工况进行选取。依据系统调试经验,选择辅助增益具体数值为k1=k2=k3=k4=1,k5=0.1[7]。
为系统两个模糊单元选择隶属度函数时,由于在设计系统时,将高相关度变量从第一级单元输入,低相关度变量从第二级单元输入,可知第一级单元对系统状态影响更大,其隶属度函数设计要求也较第二级单元更为严格,选取三角形隶属度函数对系统进行定义,结合系统的逻辑规则表,设计的第一级单元和第二层模糊子系统的隶属度函数如图4、图5所示。

图4 第一层模糊子系统的录属度函数
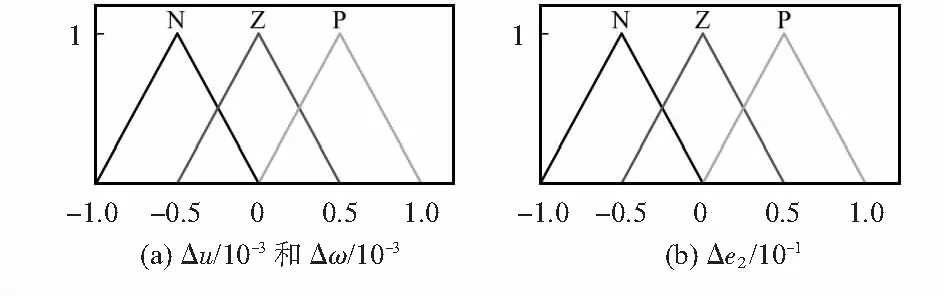
图5 第二层模糊子系统的录属度函数
3 实验对比与结果分析
在逆变器选用空间矢量脉宽调制(space vector pulse width modulation,SVPWM)调制策略,直流侧输入310 V电压,开关频率10 kHz的情况下进行实验。系统将从电压、电流传感器获取的信号输入中央处理器(central processing unit,CPU),根据模型参考模糊自适应算法追踪转子转速。图6为控制系统的拓扑结构。实验电机的额定参数为:额定转速为1 500 r/min,额定功率为500 W,极对数为2,额定电压为220 V,定子电阻值为3.88 Ω,转动惯量为0.000 032 kg/m2。
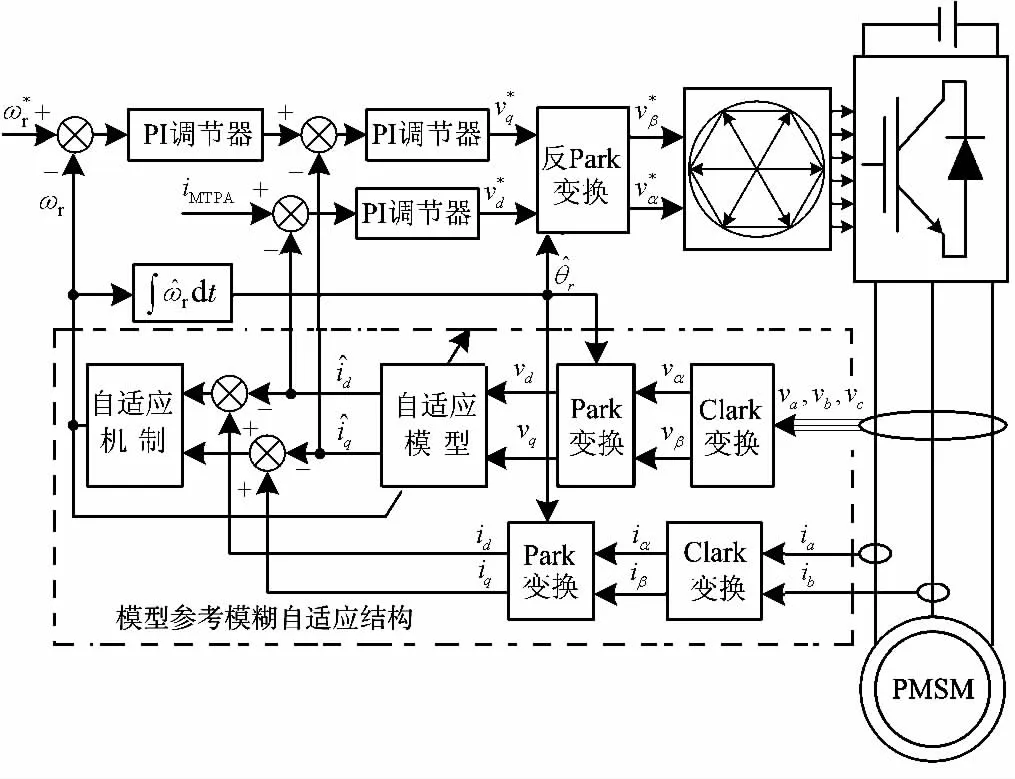
图6 采用MRAS的PMSM矢量控制系统结构框
3.1 动态性能对比
为了验证所提算法的动态性能优越性,分别在电机的高、低速域以及不同工况下,采用基于传统PI调节器的模糊自适应系统和基于双极式串联单元的模糊自适应系统进行对比实验。实验采用的2种工况如下:
1)电机初始静止,在0.2 s处给定期望转速100 r/min,持续0.8 s后,改变给定期望转速方向;
2)电机初始静止,在0.2 s处给定期望转速1 000 r/min,持续0.8 s后,改变给定期望转速方向。
图7给出了在低速和高速不同工况下分别采用2种算法的实验所得波形。可知,在低速工况本文算法动态响应性能更优,响应时间约降为传统方式的30 %。在高速工况下本文算法在动态响应方面仍然具有显著优势,响应时间约为传统算法的60 %。另外,由于模糊控制的固有属性,其在稳态运行时的纹波和转速误差也较传统PI算法更好。
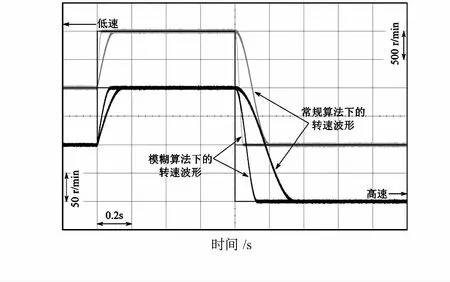
图7 低速和高速不同工况下2种控制算法的转速实验波形
一般,模型参考自适应系统在电机高速域内对转子位置的测量更为准确,在低速域内,测量则精度大大降低。
图8为在低速工况下采用2种算法的转子位置估测结果。可知,采用模型参考模糊自适应算法的系统在转子位置估测时用时更短,精度更高(估测精度约提升57 %)。
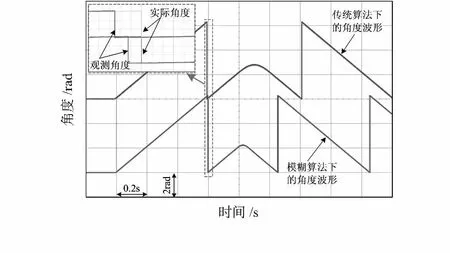
图8 低速工况下2种控制算法的位置估算结果
3.2 稳态性能对比
为了验证本文所提算法在稳态运行时的优越性,在电机低速(100 r/min)、中速(500 r/min)、高速(1 000 r/min)下进行实验,实验结果如表2所示。分析可知,在不同转速域时,本文算法的各项稳态指标性能均有所上升,优化效果明显。
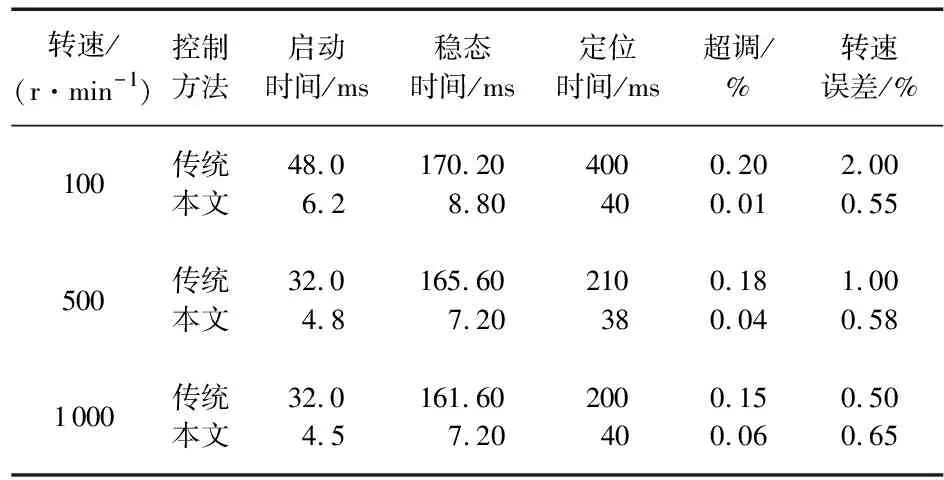
表2 2种不同转速下各项稳态性能指标对比
4 结 论
针对传统PMSM模型参考自适应系统的不足,本文提出一种基于模糊控制算法的新型PMSM自适应系统。实验结果表明,与基于PI调节器的算法相比,所提算法能够有效降低系统计算量,减少系统响应时间,改善系统的动、稳态性能,且能弥补传统算法在低速域下转速误差大、跟踪时间长的不足。另外,该算法结构简单,适合广泛应用在数字系统中。
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:24
核科学与工程(2021年4期)2022-01-12 06:30:04
防爆电机(2021年3期)2021-07-21 08:13:00
煤气与热力(2021年4期)2021-06-09 06:16:54
小学生学习指导(高年级)(2021年4期)2021-04-29 02:17:10
防爆电机(2021年1期)2021-03-29 03:02:52
电机与控制应用(2021年12期)2021-02-28 07:55:22
河北理科教学研究(2020年2期)2020-09-11 06:15:48
中华戏曲(2020年1期)2020-02-12 02:28:18
能源(2016年2期)2016-12-01 05:10:31