基于CW雷达的二维运动轨迹高精度测量方法*
2018-10-26 10:01:10张峻橦夏伟杰
传感器与微系统 2018年11期
张峻橦, 叶 明, 夏伟杰
(南京航空航天大学 电子信息工程学院,江苏 南京 211106)
0 引 言
毫米波雷达是一种常见的测量传感器,广泛应用于液位测量,建筑物安全监测,平面平坦度检测等工业测量领域。连续波(continuous wave,CW)雷达作为一种结构简单、低成本的雷达体制,能够利用差拍信号的相位变化实现探测目标位移的精确测量,因此,许多学者对CW雷达的测量应用展开了较为深入的研究[1~4]。Gu C等人[2]利用2.4 GHz CW雷达实现了高精度的液体位移测量,测量精度达到了毫米(mm)级。Zakrzewski M等人[3]针对CW雷达I,Q通道积分相位不平衡的问题,提出了正交通道校准算法,实现了单摆径向位移的精确测量。从目前的研究现状看,大部分研究都是基于一维的径向测量应用。对目标运动进行多维度较为全面的分析,就需要对上述测量方法进一步扩展。为此,本文结合现有的径向位移和方位角测量方法,通过构建几何模型,推导出横向位移等二维运动参数的表达式。并利用一发两收天线,实现了近距离单摆小球的二维运动轨迹的精确测量,从而验证了该扩展算法的有效性和精确性。
1 测量原理
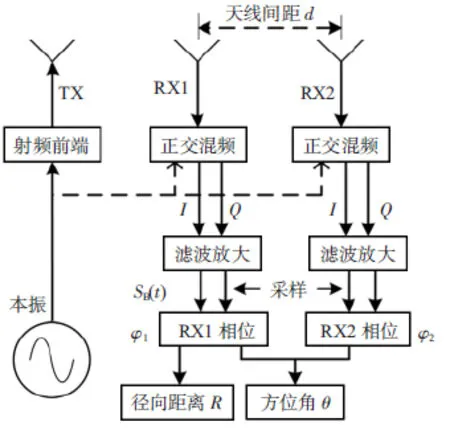
图1 雷达系统框图
CW雷达系统框图和发射接收天线如图1所示[4]。
由目标径向距离和方位角信息可进一步推导横向位移的表达式。图2构建了基于俯视图的小球二维摆动几何模型。目标在极坐标平面下的运动可以分解为径向运动和横向运动,且相互正交。在采样频率很高的情况下,相邻两数据点间的径向运动和横向运动可以表示为
(1)
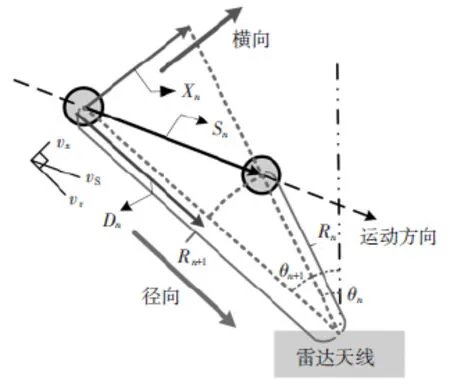
图2 基于俯视平面的二维轨迹测量模型
由上述推导可得:该方法利用雷达测得径向位移和方位角信息,通过构建二维运动模型,可以实现相关运动参数的间接测量。观测目标的运动轨迹也可以通过建立平面极坐标系加以绘制,以便重现目标的实际运动情况。将运动参数测量和轨迹测量结合,能够实现观测目标全面的二维运动状况的分析,在理论上验证了该方法的有效性。
2 理论精度分析

(2)
式中SB(t)和N(t)为差拍信号和噪声,VS和VN为信号和噪声幅度。φ为差拍信号相位。假定噪声相位β在(0,2π)内均匀分布,则高信噪比下,噪声带来的测量相位偏差为
(3)
(4)
上述各运动参数的标准差一定程度上反映了理论测量精度。可以看出,理论测量精度与发射波长和信噪比有关。可以通过提高天线发射功率,采用稳定的元器件和频域快速傅立叶变换(fast Fourier transform,FFT)的方法来提高信噪比,进而提高测量精度。当准确测得上述运动参数后,结合二维运动模型,就能实现高精度的目标二维运动轨迹的测量。
3 实验模型
采用24GHz CW一发两收雷达对单摆小球运动轨迹进行测量。雷达测量环境和简化模型如图3所示。
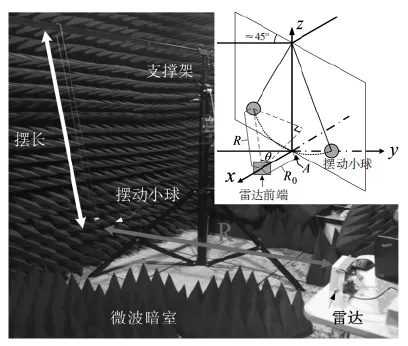
图3 实测环境照片和实测摆动模型
单摆固定于支撑架上,初始时小球保持静止并与雷达射频前端保持同一高度,此时小球位于图中的参考点A位置,正对雷达前方,方位角为0°,距离雷达1.5 m。该距离即为参考距离R0。然后轻轻斜向摆动小球,使得小球摆动方向与天线基线成约45°夹角,以便小球增大摆动的径向位移,便于测量结果的显示。当小球摆动稳定后,测量小球摆动的轨迹,同时记录摆动时间等其他参数,用于与测量结果比对。整个实验涉及到的设备和设置参数为载波频率24 GHz,采样频率500 kHz,采样时间2.88 s,天线间距0.014 m,摆动周期2.03 s,摆长1.12 m,铁球半径2.5 cm。
4 测量结果分析
图4显示了整体分析所得到的结果。整体分析用来描述摆动过程的轮廓,有助于验证实验测量的有效性。为了测量结果显示简明有效,图中数据点对应时间间隔已经由采样率500 kHz降为25 Hz。整个摆动过程测量持续了2.88 s。由图4(a)可以看出,实测数据与拟合后的摆动曲线基本吻合,呈现近似正弦曲线的特征。小球摆动周期为2.01 s,与实验记录时间2.03 s相近,说明测量结果与实际运动情况是相符的。图4(b)中雷达坐标为(0,0),参考点A坐标为(0,1 500),还可以看出单摆摆动附带稍许水平转动。图4(c)中速度为正,表明单摆小球正在靠近雷达或者天线基线,速度为负表明单摆小球远离雷达或者天线基线。通过对各方向速度的测量,整个小球摆动二维的运动情况就能够清晰地加以重建。

图4 实测结果轨迹分析
图5给出了局部分析的测量结果,用于验证实验测量的准确性。
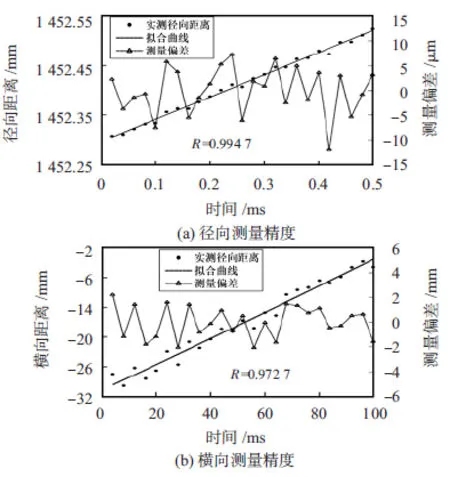
图5 实测结果精度分析
图中2组测量数据分别为径向距离和横向距离,体现了两个方向位移的变化。数据点时间间隔分别为20 μs和4 ms,整个数据长度对应时间跨度分别为0.5 ms和0.1 s。由于小球摆动较慢,在上述较短的时间跨度内可以视作匀速运动,便于精度分析。采用直线去拟合逼近这些测量的数据点,所得到的拟合曲线可以视作目标在该局部区间运动的真实值,以计算局部的数据精度。径向距离和横向距离的拟合曲线线性相关系数分别为0.994 7和0.972 7,非常接近于1,保证了拟合的准确性和有效性。通过这种方法,在20个不同的时间节点分别求取相应位置测量的均方误差,之后求平均,以此作为整个过程的测量精度,如表1所示。
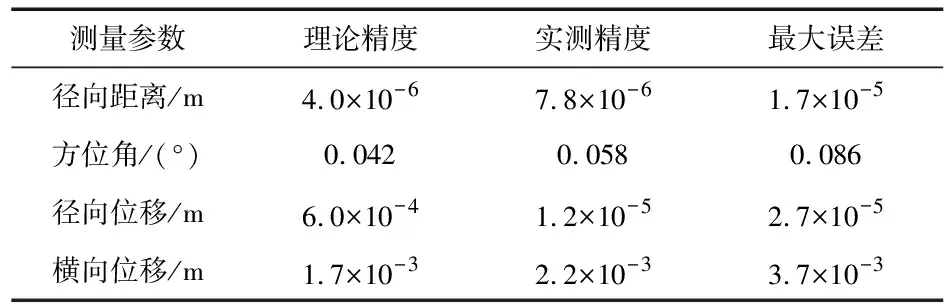
表1 局部分析中的理论精度和实测精度比较
表1显示了整个过程实测精度和理论精度的对比。该测量环境下信噪比为45 dB。从中可以看到,实测精度稍高于理论精度,但保持同一数量级,原因在于系统硬件等其他影响测量精度的因素没有考虑在内。径向测量精度高于横向测量精度2个数量级。整个过程径向位移精度达到了12 μm,横向位移精度达到了2.2 mm,显示了较高的测量精度。为进一步提高整体测量精度,应该着重提高测角精度,对于一发两收雷达,可以通过提高元器件质量,对差拍信号相位进行进一步修正等方法实现。
5 结束语
本文提出的基于CW雷达的二维运动轨迹的测量方法,能够较好地实现目标真实运动轨迹的重现与分析。所测得运动参数的实际测量精度与理论精度基本保持一致,其径向位移精度和横向位移精度分别达到了12 μm和2.2 mm,满足一般目标运动轨迹测量需求。与单一的径向位移测量相比,该方法能够实现较为全面的目标二维运动轨迹的精确测量,在近距离目标运动参数测量,运动轨迹重建等方面有一定的应用价值。
猜你喜欢
中学生数理化·高一版(2021年3期)2021-06-09 06:10:20
数学物理学报(2021年1期)2021-03-29 03:14:18
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
重型机械(2020年3期)2020-08-24 08:31:40
动漫界·幼教365(中班)(2020年8期)2020-06-29 07:28:25
家教世界·创新阅读(2020年4期)2020-06-03 04:38:56
家教世界(2020年10期)2020-06-01 11:49:26
中学生数理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:56
数学年刊A辑(中文版)(2019年3期)2019-10-08 07:34:44
海南热带海洋学院学报(2014年2期)2014-08-08 12:49:48