
红外成像系统NETD客观测量方法研究
2018-10-26 05:41徐立伟程高峰
激光与红外 2018年10期
徐立伟,李 强,程高峰
(陆军装甲兵学院兵器与控制系,北京 100072)
1 引 言
随着红外技术的不断发展成熟,红外成像系统的应用范围也越来越广,国防、工业、交通、民用等多个领域的宽泛应用更是促进了红外成像技术的发展,随着红外技术的成熟应用,红外成像系统使用的时间不断增长,红外成像系统可能会出现一些相应的老化故障。针对红外成像系统的几个重要指标进行测试,找出相应的故障是目前主要的检测方式。
近些年来,大量学者对NETD的测量进行了研究,文献[1]设计了一种NETD参数自动测量的算法但是测量过程只应用一组测量值,文献[2]研究了影响NETD测量的几种因素,文献[1]和文献[2]都运用模拟信号,没有用真实的数字信号。文献[3]将数字信号与模拟信号处理进行对比,文献[4]对几种非线性处理对于NETD的影响进行了研究,文献[5]对于整个红外成像系统检测平台进行了详述但是没有详述操作步骤和注意事项。文献[6]对SiTF的测试方法进行研究对NETD的测量有一定的研究意义。文献[7]对NETD测量进行了研究,其测量方法中计算量较大,没有分析主要的误差原因。
NETD作为评价红外成像系统的重要指标,可以用于预测极限温差下的观测距离,对于战术指标的检测有着极为重要的作用。本文从NETD的测试理论、数学模型入手,简要介绍了两种NETD测量方法。从NETD的测量方法入手分析整个测量过程,优化SiTF参数测试方法。对某型红外热像仪在两种环境温度条件下的测量表现对比分析,为野外环境下的测量提供理论依据。
2 噪声等效温差NETD及其测试理论
2.1 噪声等效温差
NETD是指红外热像系统在观察特定的图像靶标时,视场中心的输出信号与均方根噪声两者之比为一时,实验靶标目标区域与背景区域的温差。根据定义,NETD的测试方程可以有下列两种表达方式:
(1)
或者
(2)
其中,ΔT是目标与背景的温度差;S为信号;σ为均方根噪声;SiTF为信号传递函数。
目前国内各大科研机构相继引进国外的红外成像系统整机测试设备,其中主要有美国SBIR、Optikos、EOI公司、法国HGH公司、以色列CI公司的测试产品。现阶段利用以上公司测试产品主要应用两种方法进行测试:(1)利用特定靶标进行测试,控制黑体与靶标的温差以获得信号S,选定信号区域或者背景区域来获得σ,黑体显示温差为ΔT,通过公式(1)求得NETD;(2)通过黑体的温度变化控制温差,来获得不同温差下的温差信号,得到相应的关系函数SiTF,在信号区域或者背景区域求取σ,通过公式(2)获得NETD测量值。
2.2 信号传递函数(SiTF)
目标靶标尺寸固定,目标的强度可变时,我们就可以得到响应率函数,其线性区域的斜率就是信号传递函数。对于SiTF测量,通过视频采集卡对图像进行采集,通过控制不同温差获取相应图像进行处理,获取所需要的数据。对获取数据进行最小二乘拟合,最佳拟合式如式(3)所示:
(3)
其中,N为测试数据的个数;ΔVi是红外系统输出电压值;ΔTi是目标与背景之间的温差值。
2.3 三维噪声模型
在噪声等效温差的测量中,噪声的测量准确性有着决定性作用。空间噪声的测量、时间噪声的测量等促进了噪声等效温差的测量,目前较为常用的是美国陆军夜视和电子传感委员会提出来的三维噪声模型。利用三维噪声模型进行评估,噪声等效温差、固定图案噪声、背景不均匀性在三维噪声模型中都能得以考虑,将多种噪声分成7个分量来进行处理。所以本文仍采用三维噪声模型对噪声等效温差进行分析测量。
对每一帧图像都计算噪声,共采集L张图片,在每帧图像已选区域内,选择背景区域的M×N个像元,取得了L帧图像中的M×N×L个点,用于计算噪声均方根值。
其中M×N×L个像元的平均值为:
(4)
第k0帧上M×N个像元的平均值为:
(5)
第j0列上M×L个像元的平均值为:
(6)
第i0行上N×L个像元的平均值为:
(7)
第i0行、j0列上L个像元的平均值为:
(8)
第i0行、k0帧上N个像元的平均值为:
(9)
第j0列、k0帧上M个像元的平均值为:
(10)
红外成像系统的噪声均方根值为:
(11)
由噪声均方根VRMS和信号传递函数SiTF可得噪声等效温差NETD。
3 噪声等效温差测试环境搭建及测试
3.1 实验环境搭建
红外成像系统的NETD测试需要红外目标源、平行光管、数字视频采集设备、NETD计算软件和监视器,实验原理如图1所示。

图1 NETD测试原理图Fig.1 Diagram of the NETD testing
其中可控黑体和目标靶组成红外目标源,一般采用圆形方孔靶标或者半月靶。黑体大小、均匀性、控温精度和分辨率影响NETD的测试精度,采用大靶标测量同样可以减少NETD的测量数据误差,所以我们采用的靶标要求要占红外成像系统视场三分之一以上。数字视频采集设备精度不低于红外成像系统数字视频采集卡的采集精度。
3.2 测试方法
为了满足野外复杂环境,短时间内测量大量配备设备,获取更加精确的测量数据。对第二种方法进行了优化,在保证精度的基础上,缩短每一台设备的测量时间。具体方法如下:
首先将黑体温差调至所需要的最高负温差,随后将温差调至最大正温差。因为黑体控温电路稳定,变温速度恒定,在黑体变温的过程中,采集不同温差下的帧图像,图像处理之前,对每帧图像进行图像分割,选择一块固定区域,区域内包含背景区域和信号区域,两区域像元数基本一致。
通过水平sobel算子对区域进行边缘检测。通过边缘识别,可以确定信号区和背景区的分界线,求取信号区域和背景区域的像素灰度均值,以获得固定温差下的温差信号S,进而获取SiTF。以其中的背景区(或信号区)计算噪声均方根VN。噪声包括时间噪声和空间噪声。利用边缘识别出的背景区域计算噪声VRMS,代入公式(2),计算出NETD的值。
由于采用计算机边缘识别,在黑体变温过程中进行帧图像采集,缩减了采集时间,对于单黑体红外检测设备,极大的减少了环境所造成的影响,减少了人为操作,在对大规模配备的红外热像仪检测方面,有着显著的促进作用,提高了检测效率。
3.3 测试数据分析
将某型红外热像系统为研究对象,对其进行NETD参数测试,由于是单黑体控温,测得环境温度为27 ℃,测量靶标温差为-4~2 ℃时的数据,每间隔0.5 ℃,进行一次帧图像采集。同理在环境温度为25 ℃时,进行图像数据收集,将温度差值ΔT和其对应的信号灰度值通过最小二乘拟合,得出两次的信号传递函数曲线如图2所示。
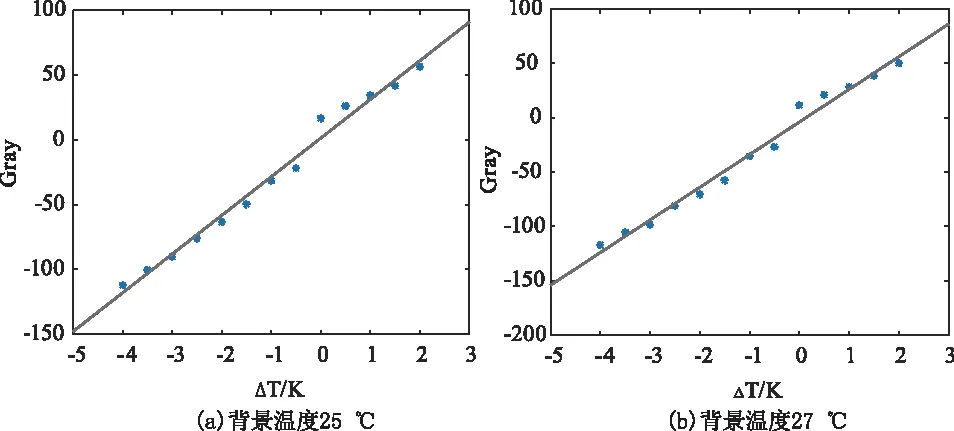
图2 信号传递函数测量曲线Fig.2 Testing curve of SiTF
从信号传递函数图像来看,检测区间都处于线性区域,实验测得SiTF分别为29.7978 Cnts/K和30.008 Cnts/K。基于三维噪声模型,我们对每个测试点的图像进行处理,在选中区域内的背景部分(也可取信号部分)进行数据收集测量,分别测得每个温差点的三维噪声均方根,通过公式(2),对两种环境温度下每个温差值时的NETD数值进行计算,数据如表1所示。
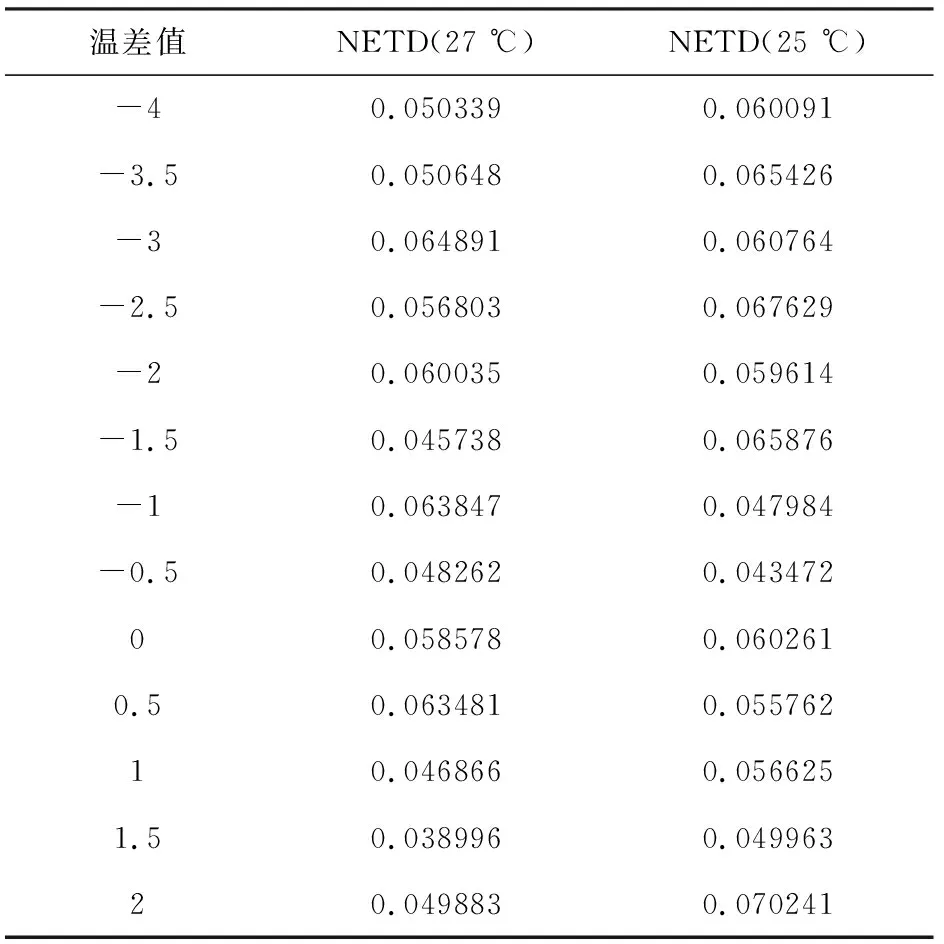
表1 NETD测量结果
如图3所示,测量结果基本一致,数据分布较稳定。背景温度为25 ℃时NETD测量平均值为56.95 mK,背景温度为27 ℃时NETD测量平均值为53.72 mK。该红外成像系统标称值NETD≤50 mK。

图3 噪声等效温差测量曲线Fig.3 Testing curve of NETD
3.4 误差分析
噪声等效温差NETD是红外成像系统性能评价的重要参数,在现阶段,实验室条件下的NETD测量日渐成熟。野外复杂环境下的NETD测量仍存在重点难点,能稳定的测量NETD是一直追求的目标。针对该测量设备在两次不同背景温度下的测量结果与出厂标称值存在一定误差,主要从以下四方面进行误差分析:
(1)式(1)中的温度差为热成像系统入瞳处目标和背景的表观温度差,平行光管中的黑体发射率并没有达到理论黑体的100%。红外波长的光在折反射平行光管中的传输过程中也有一定的损耗,需要参数加以修正,即能量损失,在实验室条件下的参数大约在0.85~0.95范围内。
(2)为了更贴切使用环境,该红外热像系统是经过一段时间的使用之后,特别是在野外应用过的情况下,再对其进行相应的测试,因此该红外热像设备可能存在无效像元,在信号区域或者背景区域测量噪声均方根时,会导致噪声均方根数值偏大,根据式(2)测得的噪声等效温差数值与标称值有一定偏差。
(3)热成像系统所接受的信号是目标与背景之间的辐射差值,不同的目标温度,不同背景温度对应不同的辐射差值。热像仪处在较高的背景温度下,系统噪声可能会有增加,从而导致热像仪NETD的测量值随环境温度的变化而产生变化。
(4)红外成像系统对于不同大小的目标靶标有着不同的响应度,在10个DAS与10%视场间选择合适的测试靶标可以获得最大的响应率。在对该红外成像设备进行测量的过程中,在选择上有所偏差,没有达到最理想的效果。
4 结 论
针对红外热像系统的噪声等效温差参数测试进行研究,在三维噪声模型的基础上,对于测量过程和算法处理方面进行优化,对两种不同温度下的NETD进行测试并与出厂参数标准进行对比,由于要实现红外成像测量的工程化、测量设备的简单化,虽然NETD的测量值与标准值、实验室条件下测量值有所出入,但是数据稳定,有较好的相似度。通过影响因子的修正,可以有效的促进NETD大规模即时测量方法的发展,研究结果对红外热像系统的工程化评价也有一定的实用价值。
猜你喜欢
世界科学技术-中医药现代化(2022年9期)2023-01-17
军民两用技术与产品(2021年10期)2021-03-16
计测技术(2020年3期)2020-08-04
河南畜牧兽医(2020年23期)2020-01-10
上海计量测试(2019年6期)2020-01-09
世界农药(2019年3期)2019-09-10
儿童故事画报·发现号趣味百科(2019年4期)2019-05-10
电子制作(2018年23期)2018-12-26
价值工程(2018年25期)2018-09-26
肿瘤影像学(2015年3期)2015-12-09
