一种简易机械式菠萝采摘装置设计
2018-10-26 01:42:24朱义灯胡利波宋金波
时代农机 2018年8期
朱义灯,胡利波,宋金波
(江西制造职业技术学院,江西 南昌 330095)
目前国内外菠萝采收作业主要以人工采摘,仅利用运送机械实现辅助搬送和运输。菠萝的采收是一项繁重的工作,如何实现菠萝的机械化采摘变得尤为重要。由于菠萝采摘季节性很强,每次果实收获的高峰期通常只有半个月左右,人工采摘短期内需要大量人力。采收时,果农戴上手套,根据果实大小和选准颜色后,用果刀切割。研究开发菠萝辅助采摘设备,对于缓解劳动力短缺,稳定采摘作业质量,减轻劳动强度,提高采摘生产效率有重要意义。
1 菠萝采摘机械结构设计
1.1 固定装置

图1 支撑板示意图

图2 固定管示意图
在采摘菠萝时采用重量较轻的不锈钢固定装置:支撑板(如图1所示)和四根不锈钢固定管(如图2所示)组成,支撑板规格采用外直径为260 mm,内直径为200 mm,与4根固定管相连接。
1.2 动力装置
通过对握力把手(如图3所示)的按压作用,将人手上的力传递给钢丝绳,带动切割镰刀运动,为镰刀提供动力来源,而且握力把手有杠杆作用,可以实现省力。
1.3 剪切装置
菠萝果实的剪切方式采用切割镰刀式,其形状如图4所示,通过钢丝绳的拉力作用,实现镰刀的运动,从而达到切割菠萝果实的目的。

图3 握力把手示意图

图4 切割镰刀示意图
(1)复位装置。本装置采用扭力弹簧(如图5所示)进行复位,切割镰刀运动时会拉动扭力弹簧;当动力装置撤销后,扭力弹簧会带动切割镰刀自动复位。
(2)简易机械式菠萝采摘装置结构图。简易机械式菠萝采摘装置结构由:切割镰刀、把手固定件、横杆、支杆与横杆连接件、握把、支杆、弯管与支杆连接件、弯管、钢丝及外套、底环、切割镰刀等组成,其结构如图6所示。

图5 扭力弹簧示意图

图6 菠萝采摘装置结构示意图
3 UG力学仿真
图7和图8是UG软件对关键零件切割镰刀和握力把手受力仿真分析结果。图7切割镰刀应力分布情况,应力分布主要集中在镰刀把手与钢丝绳接触的地方,装置工作时握力把手带动钢丝绳拉动镰刀,从而对菠萝茎进行切割。握力把手应力分布主要集中在把手孔与钢丝接触处如图8。

图7 切割镰刀应力分布
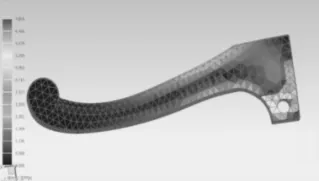
图8 握力把手应力分布
4 结语
(1)简易机械式菠萝采摘装置操作简单,设计结构紧凑,便于菠萝采摘,满足人因工程学。
(2)剪切镰刀UG仿真结果表明:应力分布主要集中在剪切镰刀把手与钢丝接触处,强度满足设计要求。
(3)握力把手UG仿真结果表明:应力分布主要集中在握力把手与钢丝绳接触处,强度满足设计要求。
猜你喜欢
现代临床医学(2024年1期)2024-01-30 12:40:22
养生月刊(2022年5期)2022-11-26 18:49:33
现代临床医学(2022年5期)2022-09-28 07:09:34
中国特种设备安全(2022年2期)2022-07-08 01:58:30
橡塑技术与装备(2022年6期)2022-06-02 08:02:54
劳动保护(2019年3期)2019-05-16 02:38:20
文体用品与科技(2016年5期)2016-04-08 06:00:19
兵器装备工程学报(2015年8期)2015-05-06 03:10:45
制造技术与机床(2015年10期)2015-04-09 07:05:36
科技视界(2014年23期)2014-12-25 05:02:32