拦焦车导焦栅移动机构的设计与优化★
2018-10-23 11:31:28程世平
机械管理开发 2018年10期
程世平
(太原重工股份有限公司技术中心, 山西 太原 030024)
引言
拦焦车是炼焦生产中的关键设备之一,承担着导流红焦及捕集烟尘的任务。导焦栅作为拦焦车的核心部件,连接焦侧炭化室炉口与熄焦车,引导1 000℃的红焦从炭化室流入熄焦车车箱内。导焦结束后,导焦栅向后移动,与炭化室炉口分离,拦焦车走行至下一炉[1-3]。拦焦车一炉与一炉之间运转周期较短,导焦栅的移动机构的好坏将直接影响到拦焦车能否正常工作,最终影响焦化厂的正常生产运行[4-6]。
本文以4.3 m焦炉配套的拦焦车为主要讨论对象。4.3 m焦侧炉台铺设有两条轨道,供拦焦车走行使用,第一轨到焦炉正面线的距离通常为700 mm,两条轨道之间间距通常为1 800 mm,炉柱尺寸通常为390 mm,除去炉柱焦侧炉台的有效空间仅为2 100 mm。炉台有限的布置空间,是导作焦移动机构设计解决的一个关键点。
1 导焦栅移动机构设计
依据导焦栅移动机构设计基础分析结果,以偏置曲柄滑块机构为参考实例,设计的导焦栅移动机构的方案见图1。设AB为曲柄长度为r;设BC为连杆长度为L,e为偏心距。曲柄的A点固定在导焦车钢结构上,为铰链连接;连杆的C点固定在焦栅上,为铰链连接;曲柄与连杆铰接。导焦栅上设有支撑导辊,导焦车上设置轨道。当曲柄AB转动时,带动连杆BC沿偏心距e往复摆动,滑块C实现的水平往复运动。最终实现导焦栅的往复运动,满足拦焦车导焦栅的运动规律要求。
1.1 曲柄与连杆参数确定
初始设计时,假设滑块的行程速度比系数K,滑块的行程H,偏距e,确定曲柄及连杆的长度见图2。
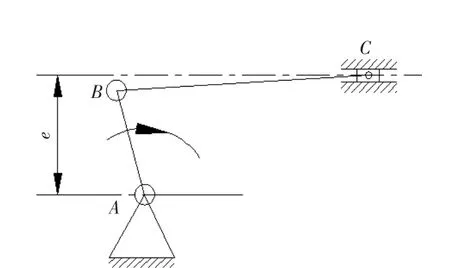
图1 导焦栅移动机构设计方案图
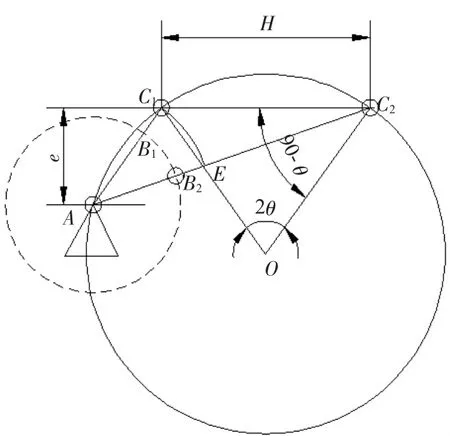
图2 导焦栅运动轨迹图
1)根据给定的行程速度比系数K,按式(1)计算极位夹角θ:

2)作线段C1C2长度为H
3)过点 C1,作射线 C1O 使∠C2C1O=90°-θ;过点C2,作射线C2O使∠C1C2O=90°-θ。
5)在线段C1C2下方作平行线,使偏距为e,交圆弧于点A,即为所求,连接线段AC1及AC2。
6)以点A为圆心,以线段AC1为半径作弧交线段AC2于E,得:

1.2 机构各个位置点确定
偏置曲柄滑块机构按输出杆与输入杆的位置关系设计,可以采用几何法、分析法和实验法,其中几何法比较简便,在一般设计中采用较多,在此我们也采用几何法设计。
曲柄滑块机构滑块偏距e在固定铰链A的上方见图3。曲柄顺时针向转Φ12角时,滑块在A点右侧向右水平移动S12距离。用几何法作图设计偏置曲柄滑块机构的步骤如下:

图3 偏置曲柄滑块机构几何法
1)作 l1、l2两平行线相距为偏距 e,在 l2上任选一点A作为固定铰链中心,并截取(E点在与位移的反方向取)。
2)作AY垂直于S12的方位线,作直线R12A使(从AY量起,与输入杆转角Φ12方向相反)。
2012年统计,全国已有240座城市实现了城市防洪排涝一体化管理。城市防洪排涝管理正由过去的“九龙管水”逐步转变为“一龙管水”,集中了优势资源,降低了行政成本,提高了执行效率,有利于防洪排涝统一指挥、实时调度和精细化管理,避免了责任不清、互相扯皮的现象,促进了防洪排涝管理水平的提高。例如,北京、天津、上海、武汉、南昌等市成立城市水务局,设防汛指挥部办公室,承担城市防汛抗旱指挥部日常工作。市防汛指挥部办公室与市水务局为两块牌子、一个班子,统一负责供水、排水、防汛、抗旱和水资源等所有涉水事务的管理工作,有效地协调供、排、防、抗的矛盾。
3)过E点作l4线与AY线平行,l4线与R12A线的交点R12是相对转动极点。
4)过 R12点作任一 lB线,同时作 lC线使∠B1R12C1=(转向与Φ12转向相同)。在lB线上任选一点作为输入杆动铰链中心B1,lC线与l1线的交点即为输出杆上动铰链中心C1。
5)A1B1C1即为机构在第一位置时的运动简图。
2 导焦栅移动机构优化
2.1 行程优化
如图4所示,在曲柄AB在转动一周的过程中,有两次与连杆BC共线。此时,连杆BC与偏心距的交点为C2和C1,交点C2和C1为滑块做往复摆动的左、右极限位置。C2C1为滑块的最大行程。
机械设计手册第二版偏置曲柄滑块机构的最大行程公式为s',见公式(4)进行计算:


图4 导焦栅行程图
导焦栅导焦时伸入炉柱内,导焦完后向后移动,得移出炉柱,拦焦车才能顺利走行到下一炭化室见图5。常规4.3 m焦炉的炉柱尺寸为390 mm。由于炉门有两种形式,一种是螺丝炉门,一种是弹簧炉门。弹簧炉门的门栓挂板要比螺丝炉门的长,故针对两种炉门形成了两个系列的导焦栅移动尺寸,螺丝炉门通常为520 mm,弹簧炉门通常为640 mm。为了减少零件总类,提高零部件的通用性和利用率,实现零件的标准化设计,所以只要最大的一组导焦栅的移动行程640 mm落在曲柄滑块机构左、右极限位置以内,便可以实现较小的行程520 mm。曲柄AB不需要转动整圈,仅通过控制AB的转动角度来完成导焦栅移动行程的系列化。

图5 导焦栅与炭化室对位剖视图
通过分析公式(4)可知,行程s'与曲柄AB、连杆BC、及偏心距的长度尺寸有关。下面分三种情况进行讨论。
1)当 L、e一定时,s'随 r的变化关系,见下页表1。当(L-r)2-e2>0 时,s'随 r的增大而增大,而且 r增大可引起 s'较大的变化;当(L-r)2-e2<0,时 s'无解。
2)当 r、e一定时,s'随 L的变化关系,见下页表2。当(L-r)2-e2>0时,s'随 L 的增大而增大,但 L 的增加幅度不明显;当(L-r)2-e2<0,时 s'无解。
3)当 r、L 一定时,s'随 e的变化关系,见下页表3。当(L-r)2-e2>0时,s'随e的增大而增大;当(L-r)2-e2<0,时s'无解。
对比表1、表2、表3的数据,可知通过增加曲柄AB的长度及增加偏心距,可有效的增加滑块的极限行程,通过增加连杆BC的长度对增加滑块的极限行程并没有多大的作用,还会占用宝贵的布置空间。综上所述,r、e选择较长的尺寸,L选择较短的尺寸,这样的选择可以有效的控制导焦栅移动机构的布置空间。

表1 s'随r的变化关系(L=810 mm,r=100 mm) mm

表2 s'随L的变化关系(e=20 mm,r=465 mm) mm

表3 s'随e的变化关系(L=810 mm,r=465 mm) mm
经过多次优化r、e、L尺寸,又结合导焦栅的可利用空间,最终取得r=465 mm、e=385 mm、L=810 mm。用画图法求得滑块沿偏心距e的运动轨迹见图6,以点A为圆心做半径为r=465 mm的圆,将圆周平均分成12等分,逆时针旋转。曲柄位置1,以1为圆心做半径为L=810 mm的圆,与偏心距交于1',按此方法依次进行作图。从图上可看得出,即使位置10与偏心距没有交点,但位置7对应滑块7'至右极限位置的距离967 mm≥640 mm,已经足够使用,故选取的数据合理。
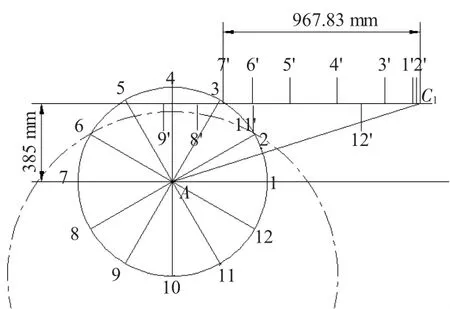
图6 C点的运动轨迹图
2.2 驱动点位置优化
经过行程优化后,导焦栅移动机构已经基本设计完成,但是这时用油缸驱动曲柄B点得话,油缸行程还是较长。而且,导焦栅的操作时间较短及布置空间有限,为了满足导焦栅的这种特殊运动要求,得进一步进行优化设计,采用缩小机构来完成此阶段的优化设计见图7。在A点增加曲柄AD,长度为d,d<r,曲柄AD与摇杆AB为同心轴固定,两者之间成一定角度。当曲柄AD顺时针转动,则曲柄AB同时顺时针转动。

图7 导焦栅移动机构简图
因为∠B1AB2=∠D1AD2,△AB1B2与△AD1D2均为等边三角形,所以△AB1B2∽△AD1D2,则
驱动点从B改到D,油缸的行程可减到0.537B1B2,这样就完全满足了生产工艺要求,也保护了油缸的活塞杆,减少了油缸的维修成本,延长了油缸使用寿命。
3 结语
导焦栅移动机构结构简单、尺寸适度,在整体布置上占的空间小,达到布局紧凑,又节约材料,很好地解决了布置空间紧张的问题,满足了导焦栅移动生产工艺要求及运动规律。
同时一套移动机构,只需改变AB杆的起始角度,便适应了两种炉门结构的标准化、系列化,降低了成本。经过多套设备的运行取得了良好的运行效果,该导焦栅的移动机构的设计是完全可行的。
猜你喜欢
煤化工(2022年4期)2022-09-03 06:18:44
机械工程师(2021年4期)2021-04-19 07:27:56
装备制造技术(2020年2期)2020-12-14 03:09:26
设备管理与维修(2019年22期)2019-12-19 01:30:12
机械研究与应用(2018年5期)2018-11-05 05:59:38
机械工程师(2015年9期)2015-02-26 08:38:12
金属加工(热加工)(2015年5期)2015-02-23 07:19:29
机械工程师(2015年10期)2015-02-02 01:14:36
河南科技(2014年6期)2014-02-27 14:06:47
金属加工(热加工)(2013年11期)2013-08-02 08:40:20