导航测量型天线相位中心稳定度测量与分析
2018-10-18 06:17秦顺友张志华
无线电通信技术 2018年6期
秦顺友,张志华
(中国电子科技集团公司第五十四研究所,河北 石家庄050081)
0 引言
天线相位中心是天线的重要性能指标之一[1],在很多现代科学和工程应用中,天线相位中心的位置起着非常重要的作用。例如在地面站反射面天线应用系统中,馈源喇叭的相位中心必须精确安装在反射面天线的焦点位置,确保反射面天线具有良好的性能[2],这样要求精确测量馈源喇叭的相位中心[3];又如在星载合成孔径雷达系统,采用天线相位中心偏移方位多波束技术提高方位分辨率[4];再如在GNSS(Global Navigation Satellite System)应用系统中,通过测量载波信号卫星和地面站地之间的传输时延进行测距解算,而时延校准参考点是发射天线和接收天线的相位中心[5],因此测量导航天线相位中心测量精度及其稳定度直接关系到导航系统测距的解算精度[6]。对于卫星导航天线,不仅关心天线的相位中心,而且其相位中心稳定度亦是很重要的[7]。目前关于卫星导航天线相位中心测量的文献很多[8],而相位中心稳定度测量研究文献很少。因此本文论述了导航测量型天线相位中心稳定度的概念及其测量方法。
1 相位中心稳定度
在IEEE标准中,天线相位中心定义为:存在与天线相关的一个点,如果将它作为辐射远场的球面圆心,则辐射球面上给定场分量的相位应基本是一个常数,至少在辐射的关键区域满足[9]。相位中心可以简单理解为天线辐射电磁波的辐射源中心;从数学上理解相位中心可描述为天线远场区辐射场的等相位面的曲率中心。如果天线辐射的电磁波是一个球面波,在任意给定频率下,使天线相位方向图φ(θ,φ)与θ、φ无关的坐标原点,称为球面波的相位中心,通常就是球心。反之,天线不同区域的等相位面有不同的曲率中心。
在整个空间,具有唯一相位中心的天线实际上是不多的,而绝大多数天线只在主瓣某一范围内或是以某点为参考点时,在所关心天线主波束一部分的角度范围内,天线的相位保持恒定,由此部分等相位面求出的相位中心,叫做天线的视在相位中心[10]。天线在不同切割面上可能有各自的相位中心,如果它们的相位中心不重合,说明天线有相散。通常采用折衷的方法,求出天线在空间不同切割面相位中心平均值,称为天线的平均相位中心。
相位中心稳定度定义为:由通过天线主波束相位峰峰值的一半所对应的波程距离,称为相位中心的稳定度,用公式表示为:

(1)
式中:
Δm为天线相位中心的稳定度;
Δφ为天线主波束相位方向图的峰值起伏;
λ为工作波长。
由天线相位中心定义可知:天线不同切割面的相位中心位置是不同的,相应地其相位中心的稳定度是不同的。计算不同切割面相位中心稳定度的平均值,称为天线相位中心的平均稳定度,它表征了天线相位中心在整个空域的特性。
2 相位中心稳定度测量
天线相位中心稳定度是通过测量天线相位方向图来实现的,天线相位方向图测量常用方法有:远场测量方法、近场测量方法和紧缩场测量方法[11]。利用实测相位方向图,确定天线相位中心位置常用方法有:移动参考点法[12]、关键点法(通常三点法或五点法)[13]、三天线法[14]和曲线拟合法(也称最小二乘法)[15]。这里介绍在微波暗室远场法测量卫星导航测量型天线相位方向图,利用移动参考点法确定天线相位中心的位置。
图1为利用矢量网络分析仪测量导航测量型天线相位中心稳定度的原理图。图中R为收发天线之间的测试距离,R应满足天线远场测试距离条件,即R≥2D2/λ(D为待测天线最大尺寸,λ为工作波长)。图中待测天线安装在测试转台上,且转台具有平移装置和极化轴旋转装置。平移装置用于实现待测天线相对转台的方位轴前后或左右的移动,用来测量待测天线相位中心的位置;而极化轴旋转装置实现待测天线绕水平轴转动,用于测量不同切割面的相位方向图,确定天线不同切割面的相位中心位置。
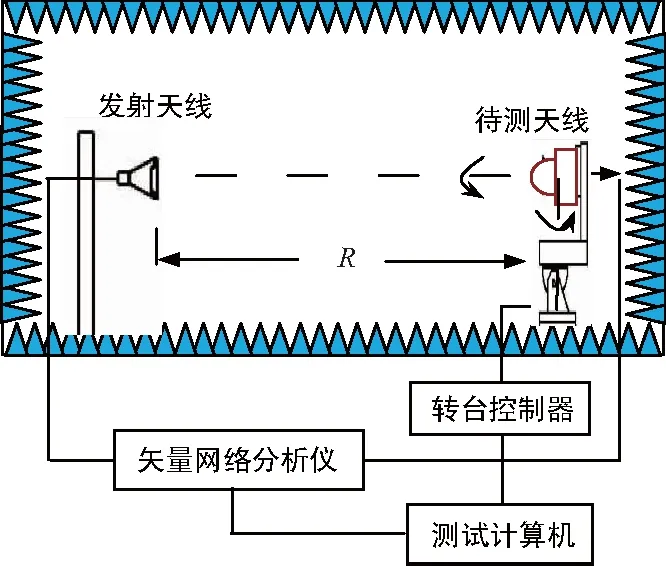
图1 导航天线相位中心稳定度测量的原理
天线相位方向图测量就是测量待测天线远场区球面上的相位。相位是一个相对量,不论在什么情况下,都是将待测信号与基准信号比较获得相对相位值。
在微波暗室,利用移动参考点法测量导航天线相位中心稳定度的原理方法是:首先按照图1所示的原理图建立测试系统,用矢量网络分析仪测量天线的相位方向图,依据在天线主波束范围内所测量的相位方向图形状,确定天线相位中心参考点移动方向[16],重复测量天线相位方向图,直到在所测量的天线主波束范围内,测出的相位方向图特性等相位为止或满足相位波动要求,此时天线的相位中心与转台转轴重合,用机械的方法测定天线相位中心的位置[17];测定天线相位中心位置以后,然后转动切割面,同理完成天线不同切割面的相位中心位置的测量。实际上,天线不同切割面的相位中心位置可能不一致,甚至相差较大,此时精确测量出不同切割面相位中心的位置,采用折衷方法,求出天线平均相位中心位置。最后,重新安装天线,使天线转台中心与测量的天线平均相位中心位置重合,测量天线不同切割面的相位方向图,微调相位中心的位置,直到在测量的主波束角度范围内,所有不同切割面相位方向图的起伏均达到要求值为止。
利用实际测量的不同切割面的相位方向图,求出在关注的测量主波束角度范围,天线相位方向图波动的最大值和最小值。不同切割面相位波动的最大值分别用φmax1,φmax2,……φmaxN表示,最小值分别用φmin1,φmin2,……φminN表示,则不同切割面相位中心稳定度为:

(2)
天线相位中心的平均稳定度为:
(3)
3 测量实例与分析
以一个测量型导航天线相位中心稳定度测量为例,说明导航测量型天线相位中心稳定度测量原理和方法。
图2为一个测量型导航天线,该天线工作于1 157~1 278 MHz和1 557~1 612 MHz两个频段,覆盖GPS的L1/L2波段、GLONASS的L1/L2波段和BDS的B1/B2/B3 波段,天线极化为右旋圆极化,天线采用多馈点和完全对称的天线结构设计,实现天线相位中心与几何中心的重合,实现高精度测量;该天线增益高,方向图波束宽,对低仰角的导航卫星信号接收效果好。
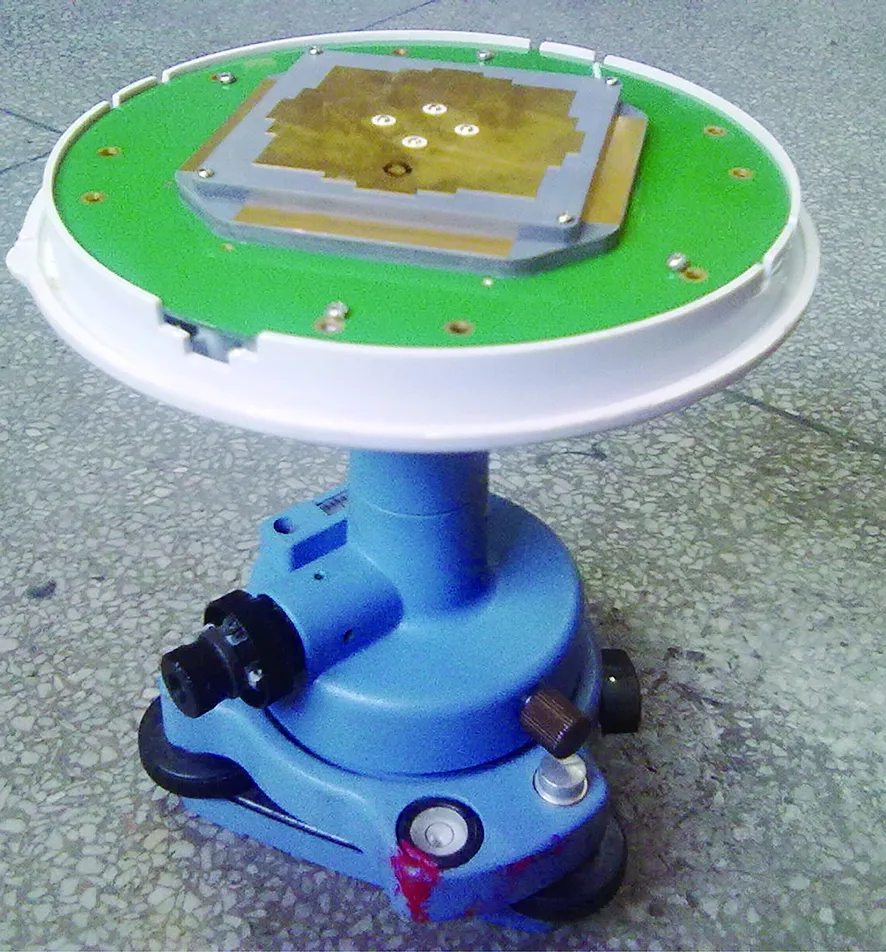
图2 测量型导航天线
图3为在微波暗室测量卫星导航测量型天线的实际装置图。图中发射天线和待测天线均为导航测量型天线,其区别是待测天线为有源天线,即低噪放大器与天线单元集成在一起,而发射天线为无源天线,天线工作频段和极化是一样的。这样使用的目的是减少微波暗室多重反射对测量结果的影响,因为发射天线发射右旋圆极化波,微波暗室一次发射为左旋圆极化波,从而减少测试环境反射的影响。

图3 导航天线相位中心稳定度测量装置
实验时,首先通过测量不同切割面相位方向图,确定不同切割面相位中心位置,计算出导航测量型天线的平均相位中心的位置;然后调整天线平均相位中心位置与转台旋转中心重合,测量不同切割面的相位方向图。图4给出了测试频率为1 207 MHz,在0°切割面、22.5°切割面、45°切割面、67.5°切割面以及90°切割面的相位方向图。表1给出了在天线主波束±50°角度范围内,天线相位中心稳定度测量结果。由测量不同切割面天线相位中心稳定度可获得天线相位中心平均稳定度≤±2.31 mm。
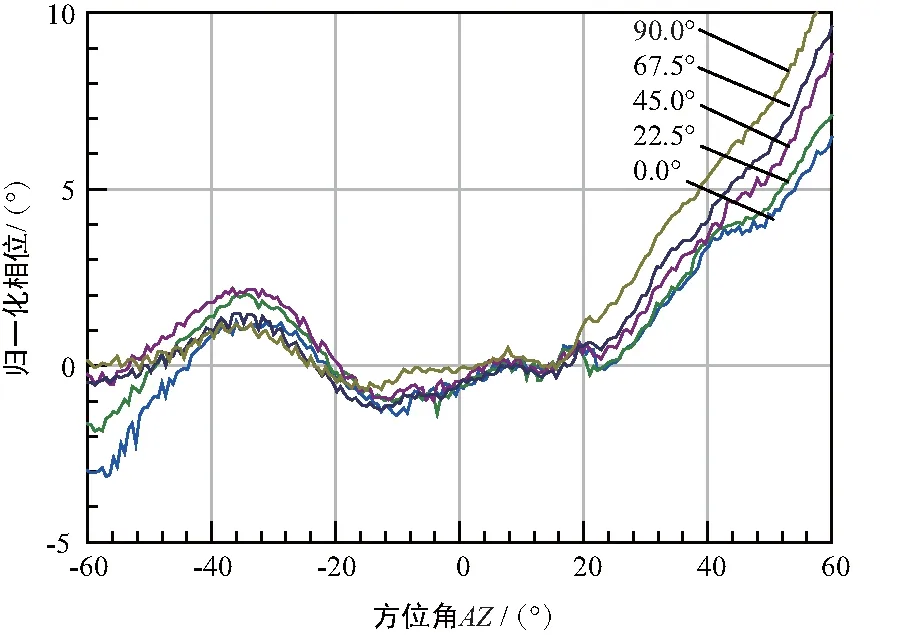
图4 频率为1 207 MHz的不同切割面的相位方向
表1 频率为1 207 MHz的相位中心稳定度测量结果

切割面/(°)φmax/(°)φmin/(°)Δmcut /mm04.293-1.4141.9722.54.500-1.3702.0345.05.395-0.9842.2067.56.185-1.2502.5790.07.405-0.6952.80
图5给出了测试频率为1 602 MHz,在0°切割面、22.5°切割面、45°切割面、67.5°切割面和90°切割面的相位方向图。表2给出了在天线主波束±50°角度范围内,天线相位中心稳定度测量结果。由测量不同切割面天线相位中心稳定度可获得天线相位中心平均稳定度≤±1.01 mm。
实验结果表明:在不同切割面,天线相位中心及其稳定度是不同的。
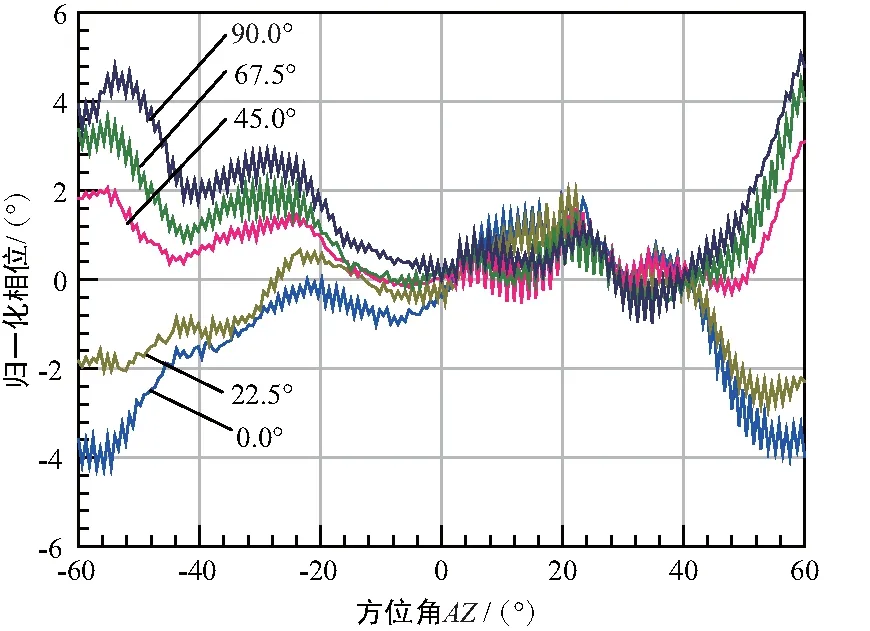
图5 频率为1 602 MHz不同切割面的相位方向
表2 频率为1 602 MHz的相位中心稳定度测量结果

切割面/(°)φmax/(°)φmin/(°)Δmcut/mm01.785-3.3071.3222.51.979-2.1841.0845.01.604-0.5210.5567.52.355-0.5910.7790.04.166-0.9551.33
4 结束语
卫星导航系统是通过时延测量实现测距的,而天线相位中心为时延测量基准点,因此卫星导航天线相位中心测量精度及其稳定度直接影响卫星导航系统的定位精度。本文简述了利用矢量网络分析仪测量导航天线相位中心及其稳定度的原理方法,提出通过测量不同切割面的相位方向图来确定天线相位中心稳定度的方法,对卫星导航天线相位中心测量,特别是相位中心稳定度测量具有重要的参考价值。
猜你喜欢
宇航计测技术(2021年3期)2021-08-17
成都信息工程大学学报(2021年6期)2021-02-12
金属加工(冷加工)(2020年11期)2020-11-24
舰船科学技术(2020年3期)2020-04-22
通信技术(2019年3期)2019-05-31
精密制造与自动化(2018年1期)2018-04-12
环保科技(2017年5期)2017-11-07
自动化学报(2017年2期)2017-04-04
电子产品世界(2016年1期)2016-03-07
橡胶工业(2015年2期)2015-07-29