
玩具小海豚-Adams仿真分析
2018-10-17 08:53:28
福建质量管理 2018年18期
(河南省郑州大学 河南 郑州 450001)
引言
玩具小海豚是婴幼儿比较喜欢的一种小玩具,上紧发条后,(发条与齿轮2在同一根轴上)放在地上,小海豚两个手臂(手臂旋转副用齿轮1表示)就会一颠一颠向前走,当然步子迈的很小,走动的时候,小海豚头顶上顶着的小球也会跟着旋转。ADAMS是一个强大的建模和仿真环境,它可以建模、仿真并优化机械系统模型。ADAMS可快速对多个设计变量进行分析直到获得最优化的设计。本次仿真分析的建模环节比较复杂,因此用其它软件来完成,本次仿真分析主要利用ADAMS软件对玩具小海豚手臂的运动进行模拟仿真,获取玩具小海豚手臂运动的角度位移的范围与角速度的范围。
一、几何模型
玩具小海豚几何模型在SolidWorks2014软件中创建,然后将整个装配体导出为*.xt格式,接着导入到Adams软件中,效果如图所示:

由上图可知,几何模型由发条、手臂、身体外壳、齿轮、球等组成。
二、玩具小海豚多刚体动力学仿真分析
(一)创建驱动
在模型树种双击齿轮2旋转副,设置其转速为20d*sin(2*PI*time)d/s,如下图所示:
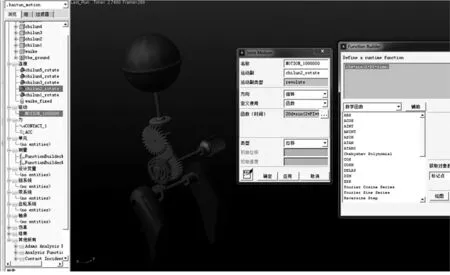
创建驱动
(二)创建解算方案并求解

单击[求解]按钮进行计算
(三)计算结果查看
1.手臂角度位移曲线
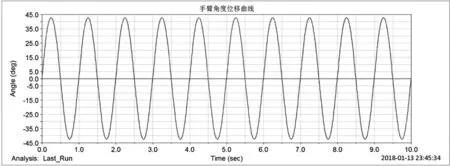
运动角度在-40到40°之间
2.手臂角速度曲线

运动角速度在-260-260 d/s之间
三、结语
经过一个多月的努力,基于ADAMS对玩具小海豚手臂运动的仿真分析终于完成,在整个学习过程中,出现过许多的难题,但都在同学的帮助下顺利解决了,在不断的学习过程中我体会到:
(1)学习ADAMS软件是一个不断学习的过程,从最初对ADAMS软件一无所知到现在已经基本熟练ADAMS软件的基本操作,我体会到实践对于学习的重要性。
(2)通过这次大作业,我深刻体会到要做好一件完整的事情,需要有系统的思维方式和方法,对待要解决的问题,要耐心、要善于运用己有的资源来充实自己。
猜你喜欢
动漫界·幼教365(小班)(2022年7期)2022-07-11 09:47:13
红领巾·萌芽(2022年2期)2022-01-31 01:43:21
意林(2019年20期)2019-10-24 21:05:06
幼儿画刊(2018年10期)2018-10-27 05:44:30
小哥白尼(趣味科学)(2018年4期)2018-06-21 06:23:28
幼儿画刊(2018年3期)2018-04-09 06:16:36
环球时报(2018-01-18)2018-01-18 05:43:15
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
公民与法治(2016年4期)2016-05-17 04:09:12
火控雷达技术(2016年1期)2016-02-06 02:18:01
