
基于耦合Van der Pol-Duffing系统的微弱信号检测研究
2018-10-15 07:25石兆羽杨绍普赵志宏
中国测试 2018年8期
石兆羽,杨绍普,赵志宏
(1.石家庄铁道大学机械工程学院,河北 石家庄 050043;2.河北省交通安全与控制重点实验室,河北 石家庄 050043)
0 引 言
检测微弱信号在早期机械故障检测中是一项具有挑战性的任务,传统的检测方法在强噪声条件下会受到一定限制[1-3]。混沌振子检测系统具有对微弱周期信号敏感和对一定强度噪声免疫的特性,使它在微弱信号检测中非常具有优势[4-6]。
Van der Pol-Duffing振子是非线性系统中具有代表性的一类系统,该系统可随周期策动力强度的变化表现出丰富的非线性动力学特性,如倍周期分岔、混沌状态、周期状态等[7-9]。它对微弱信号敏感和对噪声免疫,为其应用于微弱信号检测领域提供了可能。作为经典混沌系统,Van der Pol-Duffing振子常被用于动力系统的建模,如今在物理、生物工程、神经学和经济学等领域,很多非线性问题[10-16],都可以简化成为该系统来进行研究。随着研究的深入,人们从研究低维混沌发展到研究高维时空混沌,耦合Van der Pol-Duffing系统就属于高维时空混沌系统。耦合混沌系统的动力学行为比单振子更为复杂,它的同步和控制过程是光学、电子技术、生物学等领域的研究重点,受到了世界各国学者的关注。
本文研究了耦合Van der Pol-Duffing系统在微弱信号检测当中的应用。利用该耦合系统对微弱信号的敏感性和对噪声的免疫性以及Van der Pol-Duffing振子之间相互联系和控制的工作特性,为混沌振子检测微弱信号提供了新的方法。本文建立耦合Van der Pol-Duffing系统,分析该耦合系统的动力学行为,并根据耦合Van der Pol-Duffing系统的相变对微弱信号进行检测,获得较好的效果。
1 建立非线性耦合系统模型
Van der Pol-Duffing振子作为非线性动力学中最典型的自激振荡系统之一,经常用来描述非线性工程学中重要的振荡过程和建立复杂的动力学模型。此系统的形式如下:

式中:α——阻尼系数;
β——刚度系数;
fcos(ωt)——周期策动力;
f——周期策动力的幅值;
ω——周期策动力的频率。
为了更好地说明此系统最具代表性的两种动力学行为即混沌态和周期态,本节对该系统建立Simulink模型,用定步长四阶Runge-Kutta法进行仿真。当系统参数为α=5,β=1,f=5,ω=2.466 rad/s,初值为 (0,0)时,通过观察相图可知,此时系统处于混沌状态,如图1(a)所示。当f取值为6,其余参数不变时,系统处于周期态,如图1(b)所示。两个相图不仅展现了混沌振子最典型的两种状态,而且说明了混沌振子对参数的变化非常敏感。
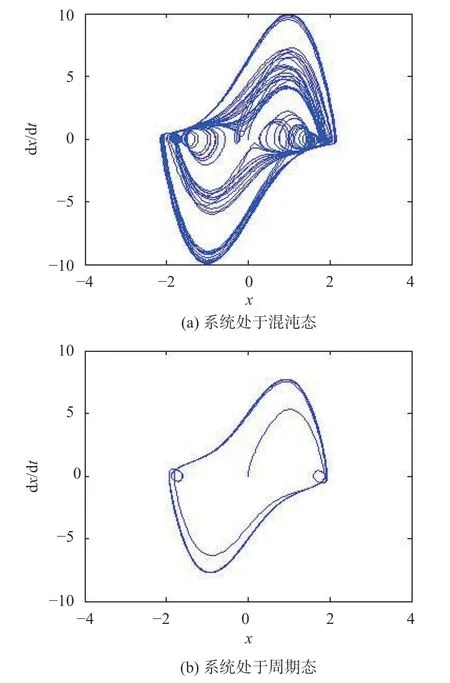
图1 Van der Pol-Duffing振子的相图
根据式(1),建立耦合Van der Pol-Duffing系统:

其中x,y,z是用来模拟系统状态的无量纲变量,α1,α2,α3是 阻尼系数,β1,β2,β3是刚度系数,fcos(ωt+θ)是周期策动力,f是幅值,ω是频率,θ表示初始相位,通常情况下,选取θ=0。当其他参数取固定值,耦合Van der Pol-Duffing系统的状态会随着幅值f的变化而变化。对于式(2),可通过观察系统处于混沌状态还是周期状态来判别输入信号中是否含有微弱信号。式(2)的状态方程为
2 不同参数对系统动力学行为的影响
混沌振子对系统参数的变化非常敏感,本节选取两组系统参数,通过分别画出耦合系统的分岔图来研究系统参数对耦合系统动力学行为的影响。分岔是指系统某一参数达到临界值时,系统行为发生突然变化的现象,研究分岔揭示了系统不同状态之间联系和转化,与系统的结构稳定性联系十分紧密。对于式 (3),取 α1= 2.1,α2=3.0,α3=2.6,β1=1.1,β2=1.2,β3=1.0,ω=4.2作为第1组参数;α1=3.0,α2=3.2,α3=3.0,β1=1.1,β2=1.2,β3=1.0,ω=3.6作为第2组参数。在初值为(0,0,0,0,0,0)的条件下,应用Matlab画出第1组参数下耦合系统的分岔图,如图2所示,显示出了丰富的动力学行为。通过观察此图可以看出随着周期策动力幅值f的逐渐增大,由于非线性特点,耦合混沌振子系统出现了倍周期分岔,混沌态和周期态的现象。该图以周期策动力幅值f作为控制参数,f的取值范围为[5,9],步长为0.002 5。当周期策动力的幅值f的值为5.5时,根据分岔图可知此时耦合系统处于稳定的周期态,通过 Simulink画出相应的相图,如图3(a)所示。周期策动力的幅值f为6时,耦合系统处于混沌状态,如图3(b)所示。

图2 第1组参数下耦合系统的分岔图
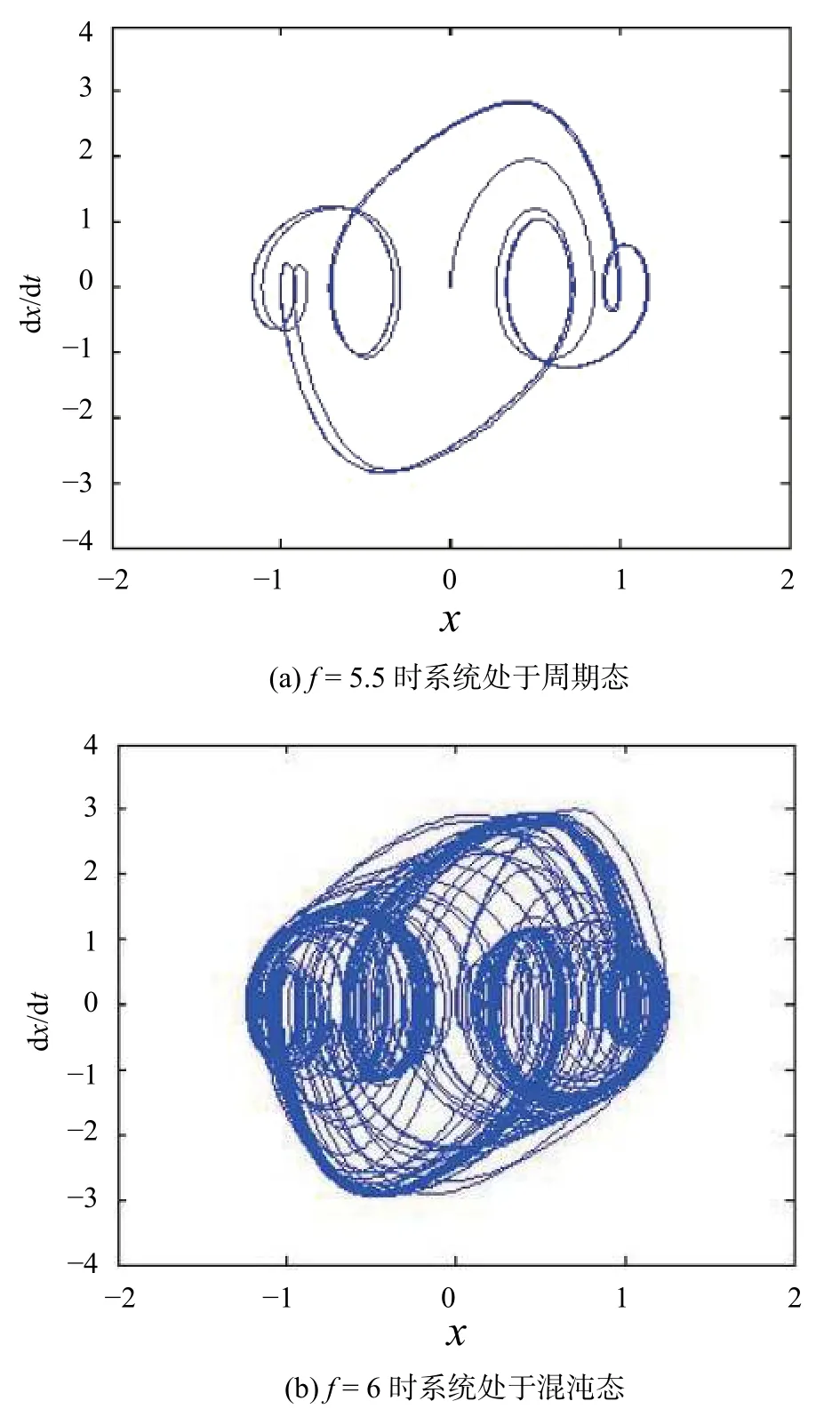
图3 第1组参数下耦合系统的相轨迹
图4是第2组参数下耦合系统的分岔图,系统同样具有丰富的动力学行为。周期策动力f的取值范围为[2,7]。图5(a)和图5(b)分别是f为2.2和2.3时耦合混沌系统处于混沌态和周期态的相图。对比两组参数下耦合混沌系统的分岔图和相图可知,参数的变化使得耦合系统的动力学行为发生了明显改变,说明耦合混沌系统对参数的变化非常敏感,从而为检测微弱信号提供了可能。

图4 第2组参数下耦合系统的分岔图
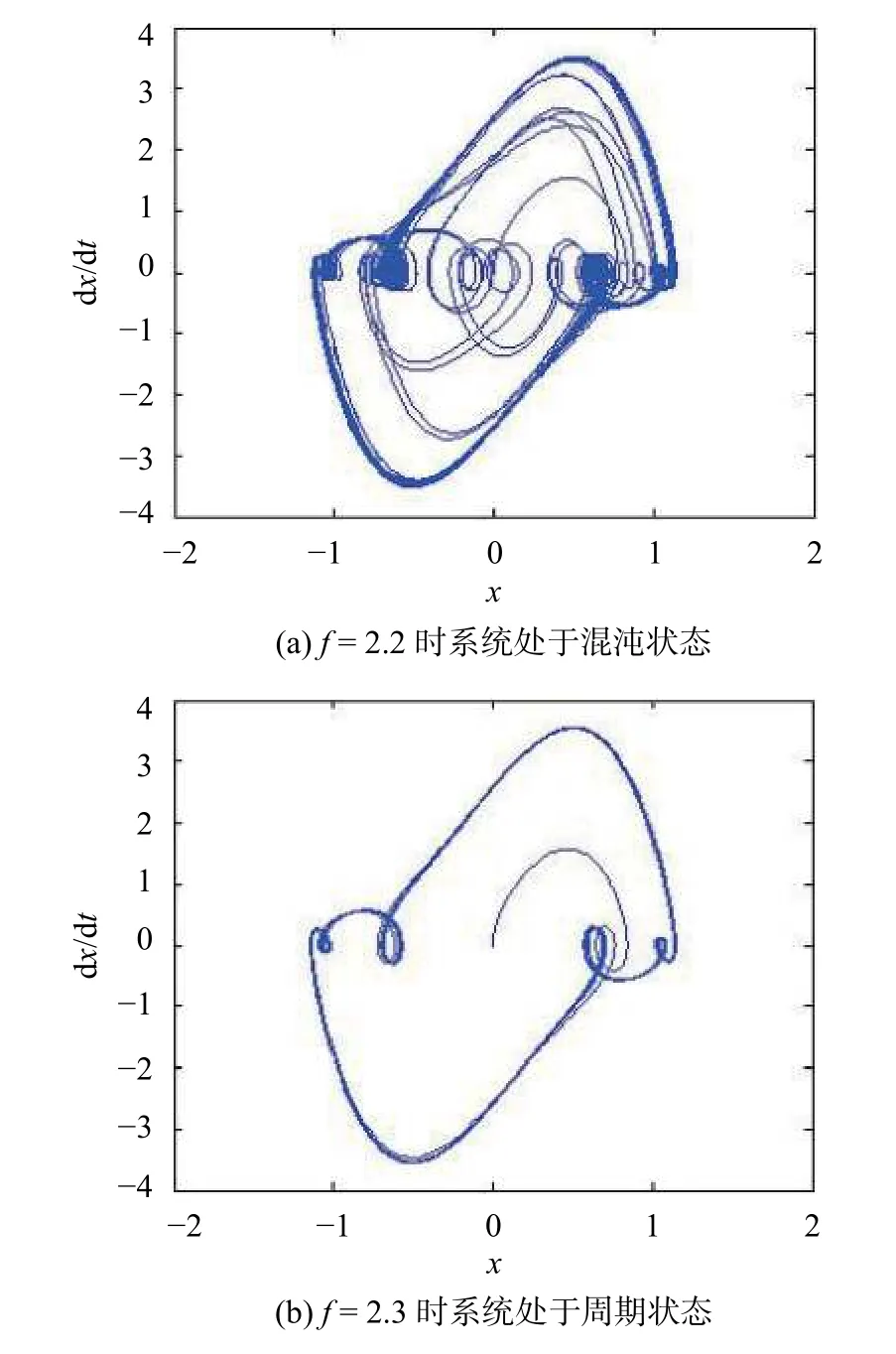
图5 第2组参数下耦合系统的相轨迹
3 耦合Van der Pol-Duffing系统检测微弱信号仿真实验
微弱信号检测是基于耦合混沌系统的相平面变化完成,该原理简述如下:
首先调整周期策动力幅值为临界阈值fe,使系统处于临界状态,然后将与周期策动力同频率同相位的微弱周期信号与噪声一起输入到耦合混沌系统当中,微弱信号与周期策动力叠加后的幅值会大于临界阈值fe,此时耦合混沌系统的相轨迹会由混沌态变为周期态,因而根据相轨迹的状态就可以判断噪声中是否包含微弱信号。
3.1 临界阈值的确定
为了获得较精确的临界点阈值,首先从分岔图获得系统临界阈值的大概位置。在第2组参数下,f=2.2时系统处于混沌状态,f=2.3时系统处于周期态。本文选取临界阈值的范围为[2.2,2.3] 。由于二分法用于求最优解,可将其用于求临界阈值的精确值。步骤如下:
1)由于2.2对应耦合系统的混沌态,2.3对应周期态,取2.2~2.3的中间值2.25。
2)由于2.25对应混沌态,2.26对应混沌态,2.27对应周期态,所以f的取值范围为[2.26,2.27]。然后f从2.26~2.27以步长为0.001增加到2.265,该值对应混沌态,2.267对应周期态。
3)确定临界阈值fe为2.265。
3.2 检测微弱信号
输入微弱信号和噪声后,由式(2)可得:

式中acos(ωt+θ)是微弱信号,幅值为a,n(t)=σ·ε(t)是高斯白噪声。当输入包含有与周期策动力同频率同相位的微弱正弦信号的噪声时,会有fe+a>fe,由于系统对微弱周期信号敏感,对噪声具有免疫力,相轨迹会由混沌态跃迁到周期态,此时就能判断已经成功检测到微弱周期信号。令fe=2.265,当a=0,σ=1时,即只输入噪声时,系统处于混沌状态,如图6(a)所示。当a=0.002,σ=0.03时,即输入微弱信号和噪声时,系统处于周期状态,如图6(b)所示。仿真结果说明噪声不会改变耦合系统的相轨迹即该系统对噪声具有免疫力而对微弱正弦信号敏感。
4 噪声对耦合Van der Pol-Duffing系统的影响
为研究噪声对耦合系统的影响,可对该系统输入不同强度的噪声来观察系统运行轨迹的变化。当周期策动力幅值f=2.5且不输入噪声时,耦合混沌系统处于周期状态。当输入σ=0.1的噪声时,虽然耦合混沌系统的相轨迹并未改变,但是由于噪声的干扰,耦合系统输出的的相轨迹边界稍些粗糙,说明耦合系统对噪声具有一定的抑制作用,如图7(a)所示。当噪声强度进一步加大到σ=0.3时,系统的相轨迹不再保持周期态,反而会表现为杂乱无章的混沌态,如图7(b)所示,可见即使噪声很强烈,相轨迹仍然保持在一定的范围内运动,说明混沌吸引子对相轨迹具有束缚作用。图7(c)为当周期策动力幅值为2.267时,相轨迹也保持在周期态,同样输入σ=0.1的噪声时,耦合混沌系统却并不能如f=2.5时一样保持周期状态,如图7(d)所示,说明周期策动力的幅值精度较低时,系统受噪声的影响相对比较小,精度较高时,噪声对系统的影响较大。

图6 耦合系统的微弱信号检测仿真实验
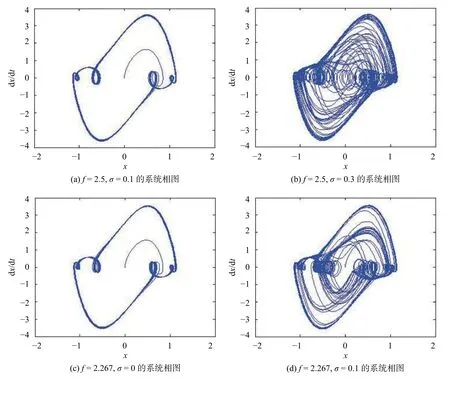
图7 不同幅值下噪声对系统的影响
现对σ进行取值,取值范围为[0.01,0.1],以此来检测在噪声条件下该耦合混沌系统检测微弱信号的能力。仿真结果表明只有当σ≤0.047时,微弱信号才能被检测到。图8(a)和图8(b)分别为σ=0.047,σ=0.15时耦合系统的相图。因此,测得的信噪比门限为

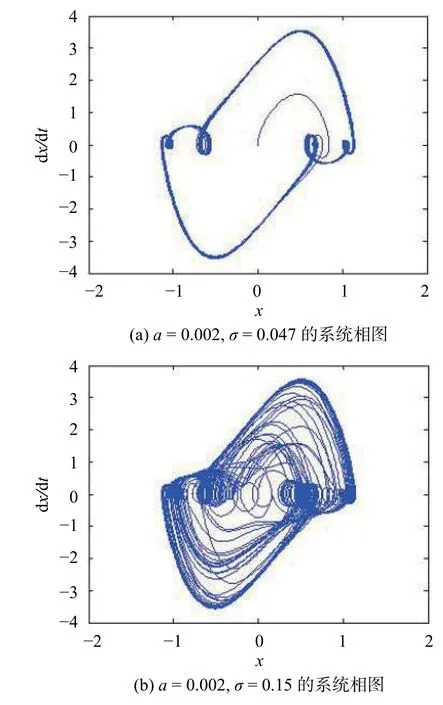
图8 噪声变化对系统相轨迹的影响
在微弱信号检测领域中,用传统时域检测方法得到的最低信噪比门限只有–10 dB,根据式(1)所建立的混沌系统信噪比门限为–18 dB,而耦合Van der Pol-Duffing混沌振子系统的信噪比门限为–30 dB,与前两种方法相比大大降低了信噪比门限,说明该耦合混沌系统在微弱信号检测领域非常具有优势。
5 微弱信号与周期策动力不同频率对检测的影响
当微弱信号的频率与周期策动力的频率不同时,设周期策动力为2.265cos(3.6t),微弱信号为0.035 cos(ωt),假设ω取值为1和5。将该微弱信号输入到耦合系统后,系统仍处于混沌态,如图9(a)和图9(b)所示。该情况表明当微弱信号与周期策动力频率不同时,系统并不会发生相变,也就是说系统检测不出与策动力不同频率的微弱信号。
6 微弱信号与周期策动力不同相位对检测的影响
设周期策动力为fecos(ωt),微弱信号为acos(ωt+θ)以考虑微弱信号与周期策动力相位不同时对检测带来的影响。系统总的策动力为
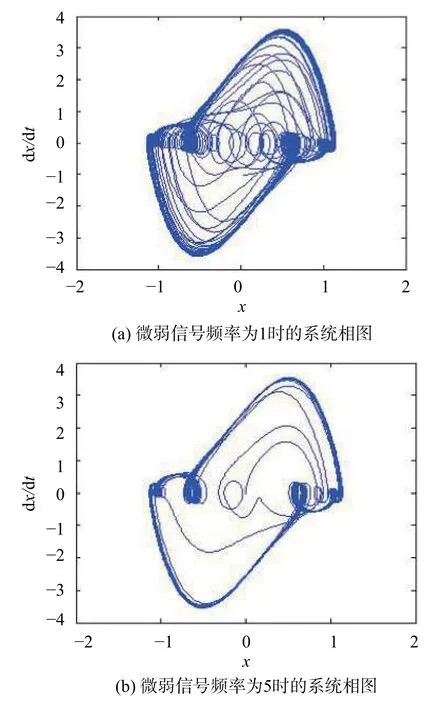
图9 微弱信号频率变化对检测的影响

7 结束语
本文提出了一种基于耦合Van der Pol-Duffing系统的微弱信号检测方法。根据耦合方程建立了检测模型,比较了两组参数下系统的动力学行为,阐述了应用混沌振子检测微弱信号的原理。仿真结果表明用耦合Van der Pol-Duffing系统检测微弱信号是可行的,信噪比门限达到–30 dB。噪声对该耦合系统的影响取决于周期策动力的幅值精度,精度越高,影响越大。该耦合系统检测不出与周期策动力不同相位或不同频率的微弱信号。本文的研究表明耦合Van der Pol-Duffing系统在微弱信号检测领域具有一定的研究价值。
猜你喜欢
现代信息科技(2022年8期)2022-08-12
装备维修技术(2022年7期)2022-07-01
振动与冲击(2022年10期)2022-05-30
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
物理学报(2019年12期)2019-06-29
学校教育研究(2018年4期)2018-10-21
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
电子制作(2017年7期)2017-06-05
