浅谈雷达与AIS信息融合技术在控制河段通行指挥中的应用
2018-10-15 07:57曾科伟
中国水运 2018年10期
曾科伟
(长江重庆航道局,重庆 401147)
控制河段是指具有弯曲、狭窄、滩险等特征,通视条件差,会船避让困难,导致船舶同一时间段内只能单向通行的航道河段[1]。控制河段大多滩多水急,一旦上下行船舶同时进槽会让,轻则出现紧迫局面影响船舶通行效率,重则引发船舶海损事故,导致控制河段断航,造成重大的经济损失。为确保控制河段航道的畅通安全,船舶在通过时必须按有关规定接受通行信号台的指挥,根据揭示信号单向、有序地通行。
随着长江干线数字航道兰家沱至鳊鱼溪段建设工程的建成投用,初步实现了控制河段通行信号指挥从传统被动指挥到实时监控指挥的转变,即摆脱了信号员先通过人工瞭望观测和VHF电话联系获取上下水船舶信息和航行状态,然后根据通行规则发出信号指令的传统指挥方式,依托AIS可以远距离实时监控船舶位置,避免船舶不报、谎报船位,有效提高了控制河段通行效率和安全水平。但由于AIS信息受控制河段周边山体等客观因素和自身发送机制的影响,时常出现信号丢失、延时等情况,严重制约了通行指挥的准确性。为此,将雷达和AIS的融合信息技术应用于通行信号指挥中,可实现对目标船舶的自动识别,提高目标船舶的监测和跟踪精度,提升信号指挥工作效率和服务质量。
1 雷达和AIS功能及特点
1.1 获取目标信息的方式
雷达发射机通过雷达天线定时向控件发射射频脉冲信号,并进行方位扫描,当接触到航行中的船体后,会产生回波,雷达接收机收到信号后,经过处理在雷达终端界面进行显示。这是主动获取目标信息的方式。
AIS(Automatic Identification System, 船舶自动识别系统)由基站设施和船载设备共同组成[2],船载AIS传感器主要包括GPS/DGPS/GNSS、陀螺罗经、计程仪等,如图1所示。船舶在航行过程中根据信号发送机制发送船舶动静态信息,然后通过岸基AIS台站接收船载AIS信息,获取船舶状态。这是被动获取目标信息的方式。
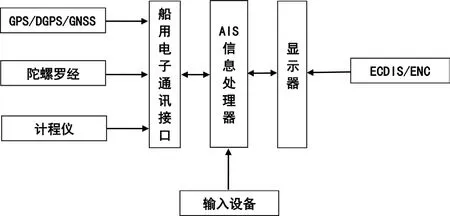
图1 船载AIS基本构成
1.2 获取目标信息的种类
雷达可以获取周边水域所有运动目标、固定目标等信息,雷达目标回波还可以在一定程度上反映目标的大小和形状,但雷达无法获取目标物的静态关联信息,如目标物名称、类型等。
AIS信息大致可分为四类[3]:一是船舶位置、对地航向和速度、艏向、航迹等动态信息;二是船舶识别码MMSI、吨位、船名和呼号、船长和船宽、船舶类型等静态信息;三是船舶吃水、危货类型、目的港等与航行有关的信息;四是航行警告等与船舶安全有关的短电文。
1.3 获取目标信息的精度
雷达的目标数据是通过对目标自动跟踪处理中的航迹外推、航迹相关等形成的目标航迹线计算出来的,根据回波时长随目标距离的增加而延长,存在一定的滞后性。目标位置信息一般以雷达为坐标原点的极坐标系表示,方位线数据精度随目标与雷达之间的距离增加而变差[3]。
AIS的目标位置、航速、航向和船首向数据来源于船载GPS和罗经,是即时运动参数或人工输入的船舶实际数据,精准度较高。目标位置信息一般直接采用WGS-84坐标系的经纬度表示。但受发送机制的制约,AIS信号发送的时间间隔受目标速度、方位变化等影响。
1.4 两者特点比较
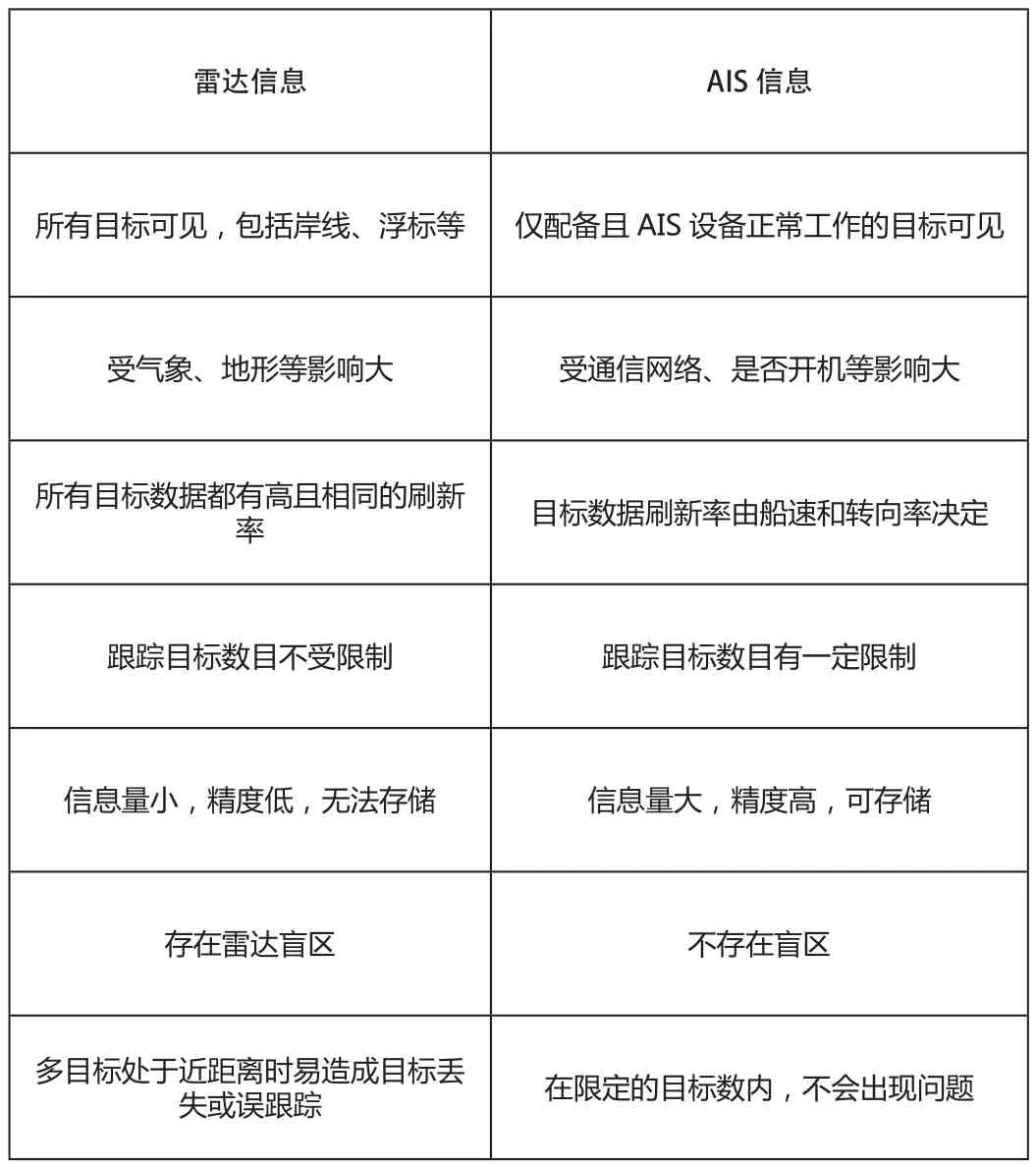
表1 雷达与AIS信息特点比较
表1中,通过对雷达和AIS信息的功能和特点分析发现,两者虽各有优势,但也存在一定的局限性,单独使用均难以满足通行信号指挥的需求。为此,我们可以将雷达和AIS信息融合起来,实现信息互补,达到辅助通行指挥的目的。
2 雷达和AIS的信息融合
2.1 信息融 合原理
信息融合可以广义地概述为把来自多种传感器的信息或数据,根据既定的规则,分析、结合为一个综合性的情报,并在此基础上为用户提供全面、精确的信息过程[4]。在该项技术中,多传感器系统是信息融合的硬件基础,多源信息是信息融合的处理对象,分析和综合处理是信息融合的核心[5]。
信息融合的模式主要有两种:集中式融合和分布式融合。集中式融合是指各传感器将接收到的数据都传到数据融合中心,在数据融合中心进行处理并做出判断;分布式融合是指各传感器利用自己的测量单独做出判断,将决策信息传送到数据中心,数据中心再进行进一步的处理,如图2所示。与集中式结构相比,分布式结构能以较低的费用获得较高的可靠性和可用性,可以减少数据总路线的频宽和数据处理的要求,同时获得相近于集中式结构的精度。由于雷达与AIS都有各自独立的信息处理系统,因此,采用分布式结构较为合理。
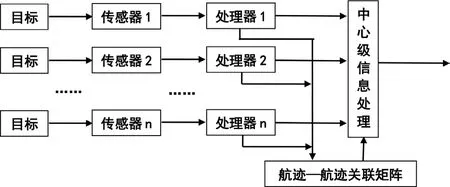
图2 分布式信息融合系统
2.2 信息融合步骤
根据信息融合的分布式融合模型,结合雷达和AIS目标数据特点,建立信息融合模型。

图3 信息融合模型
信息融合如上图主要分为三个步骤:数据预处理(坐标变换和时间校准)、航迹关联和航迹融合。
2.2.1 数据预处理
在数据融合过程中,由于雷达对目标的检测时间和空间基准点与AIS系统不同,雷达的目标位置是通过极坐标的距离和方位来描述的,而AIS是通过船载GPS来获取目标位置数据的,通过地理坐标的经度与纬度来描述。因此,为实现二者的融合,首先需要对二者数据进行预处理,预处理的内容包括坐标变换和时间校准。
(1)坐标变换。鉴于二者对目标位置的描述方法不同,需要将二者信息描述进行统一,都转换到直角坐标系中。
(2)时间校准。雷达的扫描周期一般为15r/min-30r/min,比较固定。AIS广播受发送机制的影响,其动态信息的发送间隔随着船舶的状态不同而发生变化。因此,需要将二者目标信息进行时间上的校准。常用的校准方法有三种:最邻近规则试探法、自适应时间对准、AIS信息内插或外推。
2.2.2 航迹关联
雷达与AIS信息融合的关键之处在于目标航迹关联,即通过信息处理来判断二者传输回来的两条目标轨迹是否为同一目标,也就是处理二者在检测范围内目标重复跟踪的问题,从某些程度上来讲,也可以认为航迹关联就是目标跟踪信号的去干扰和去重复的过程。在周边环境干扰较少且二者目标轨迹相距较近的条件下,实现航迹关联较为简单。但在检测区域内,目标物较多、目标物间距离较近、且周边环境干扰因素较多的情况下,航迹关联就变得相对复杂。
目前,航迹关联算法主要归纳为两类:一类是统计算法,常用的算法有加权法、统计双门限法、修正法、最近邻域法、序贯法、K近邻域法、修正的K近邻域法、经典分配法和广义分配法等;另一类是模糊算法,常用的算法有模糊经典分配法、模糊综合函数法、模糊双门限法和模糊综合决策法等。
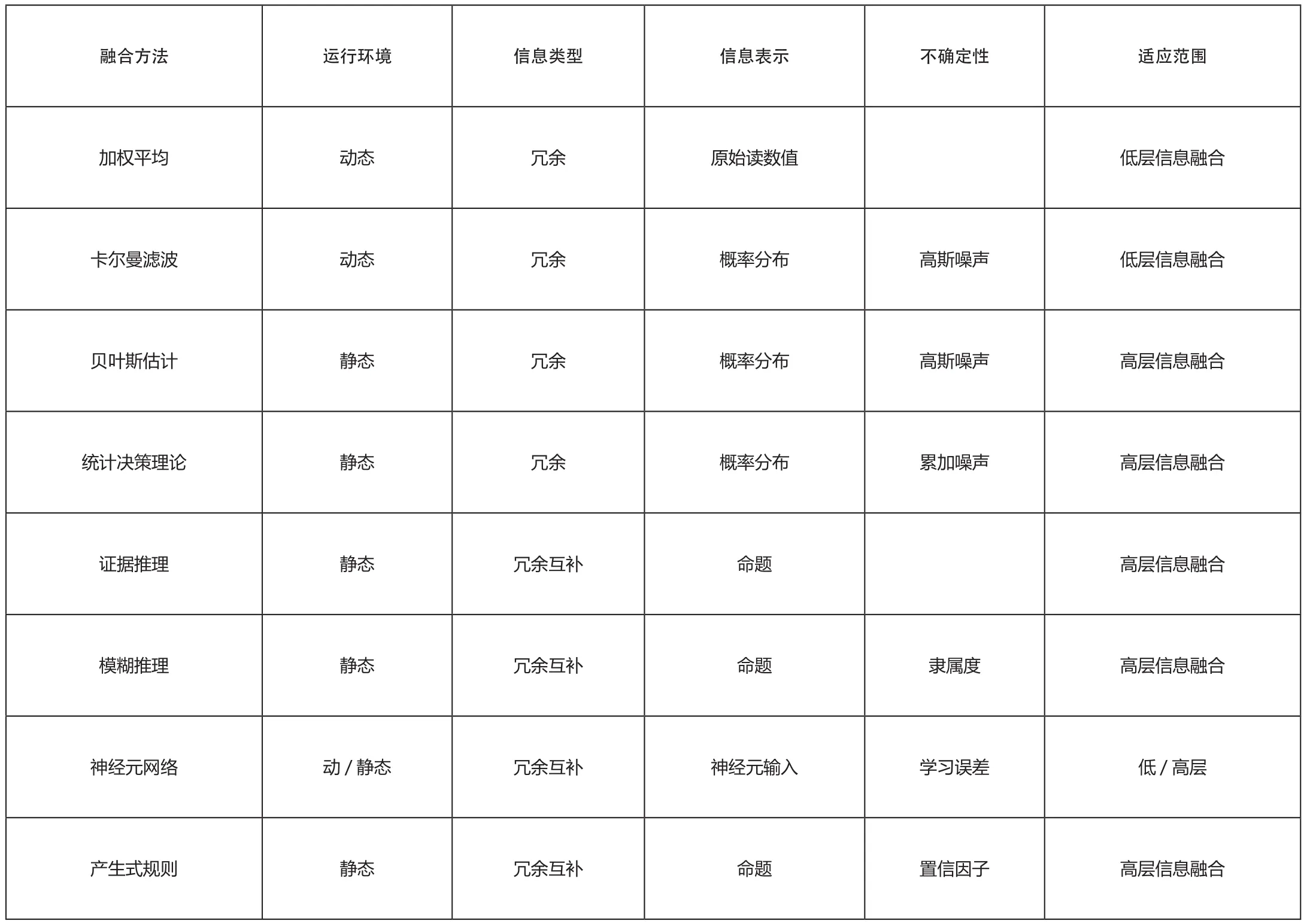
表2 信息融合方法比较
2.2.3 航迹融合
通过航迹关联检验后,可以确定同一目标的航迹,此时便可以进行目标航迹的融合处理,得到新的目标状态。目前,常用的航迹融合算法主要为统计加权法,即预先设定融合加权的比重,将二者的检测信息根据比重进行加权合并。值得一提的是,当AIS接收的信息丢失或者雷达探测数据丢失时,二者的融合跟踪显得更加重要,进一步提高了目标跟踪的精度和可靠性。在实际操作过程中,二者融合的准确度主要受二者配置的传感器精度的影响。
信息融合处理方法按技术方法和组成方式可分为多种,如表2所示:
3 结语
长江上游控制河段通航环境复杂,监测目标种类多、数量大,环境干扰明显,实时性和精确度要求高,如何提高通行信号指挥过程中船舶监测的准确性和可靠性,是长期困扰长江航道工作者的一个难题。雷达和AIS在控制河段的融合应用,为今后的信号指挥智能化拓展了思路。但在雷达与AIS信息融合的实际操作中,还有许多现实问题,如各类算法的优化、周边环境干扰因素的处理、加权比重的合理分配等,需要在今后的研究工作中进一步解决。
猜你喜欢
化工管理(2022年13期)2022-12-02
园林科技(2021年2期)2022-01-19
疯狂英语·新读写(2020年4期)2020-06-03
石油沥青(2020年1期)2020-05-25
青年歌声(2019年12期)2019-12-17
小资CHIC!ELEGANCE(2019年40期)2019-12-10
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
舰船科学技术(2015年8期)2015-02-27