
基于组合导航定位结果的车辆里程统计应用研究
2018-10-15 05:28张文超魏东岩
导航定位与授时 2018年5期
张文超,魏东岩,袁 洪
(1. 中国科学院大学,北京 100094;2.中国科学院光电研究院,北京 100094)
0 引言
出租车行业是全国大中城市交通运营的主要产业,也是市民日常出行的必备交通工具。其中,出租车计价器是出租车运营者与乘客之间进行贸易结算的计量器具,其主要是通过统计车辆行驶里程进行计价,因而计价器统计的车辆里程准确与否直接关系到运营者和乘客的经济利益。随着城市出租车数量的不断增加、国家法制计量管理的不断加强,出租车计价器检定已成为出租车行业运营不可或缺的重要环节。
计价器检定是对计价器进行校准的过程[1],传统计价器检定是通过模拟检测方式[2]实现的,即:在固定检测场地建立检定装置,通过控制步进电动机转动模拟汽车轮轴转动,根据输出的脉冲数对比电机转数对各类出租汽车计价器进行整体检测,并通过计算机配套软件对检测结果进行科学分析。整个过程繁杂又耗时,同时又影响出租车的正常运营。另外一种检定方法是基于高精度定位技术的检定方式[3-7],即:将高精度差分全球导航卫星系统(Dfferential Global Navigation Satellite System, DGNSS)接收机放在车辆上,利用GNSS定位结果校准车辆计价器。该方法可以实现出租车计价器的移动检定,且不影响出租车的正常运营。但是用于检定的高精度差分全球导航卫星系统接收机成本较高,且在城市环境中容易失锁丢失定位信息,不利于实际应用。
本文主要的贡献有三点:1)提出了基于低成本微型惯性测量单元(Miniature Inertial Measurement Unit,MIMU)和DGNSS松组合技术的移动检测方法,通过将MIMU/DGNSS松组合模块固连在车上随车一起运动,采集车辆行进过程中的高精度定位信息,利用位置增量计算车辆行驶里程,然后将该里程结果和计价器输出里程进行比对,实现车辆计价器的移动在线检定。该方法的优点是:低成本MIMU和DGNSS的组合,保证了在卫星信号良好及丢失的情况下均能输出较准确的定位信息,满足车辆在城市环境下行驶时卫星信号易被遮挡的应用需求,可以在不影响车辆正常运营的条件下对车辆进行检定,方法简便、效率高,且组合导航模块成本低,可满足广大出租车辆移动检测的需求。2)为了避免定位过程中的一些较大粗差定位点造成的里程累积误差,提出了一种分段里程比对方法,增加了长距离里程对比结果的客观性。同时自编写了里程比对软件,可有效简化里程比对分析过程。3)对本文提出的计价器移动在线检定方法进行了分类和重复性实验,验证了本文算法的有效性和可靠性。
1 技术原理
传统的模拟检测方式需要固定的场地和专门的模拟检测设备,整个过程繁琐、耗时且不方便。基于高精度卫星定位结果的检测方法是根据连续跟踪车辆一系列定位结果计算车辆行驶里程,该过程简便、省时,但由于在城市环境中卫星信号易被遮挡,所以在实际移动检测过程中往往造成定位信息丢失,使得计算的里程信息不准确,影响车辆里程检定的精度[8]。
采用低成本MIMU和DGNSS组合的方式,可以在一定程度上弥补城市环境中卫星信号丢失的缺点,在保证精度的条件下增加车辆里程移动检测的可靠性。利用组合导航的优势可以降低移动检测模块的成本,满足广大出租车辆移动检测的需求。
将低成本MIMU和DGNSS组合导航模块固连在参与移动检测的车辆上,采集车辆移动定位信息,同时车辆计价器里程采集装置也记录车辆行驶里程。将二者的里程结果进行比对从而实现计价器里程的移动检定过程。移动检测模拟效果如图1所示。
1.1 低成本MIMU/DGNSS松组合方式原理
采用MIMU和DGNSS松组合的方式构成组合导航系统,根据位置、速度组合导航方案,采用间接Kalman滤波及闭环校正方式,MIMU输出运动载体3个方向的加速度及角速度,DGNSS在差分条件下输出载体3个方向的位置和速度信息[9-13]。松组合系统结构如图2所示。
利用MIMU导航解算方法独立计算出载体位置、速度和姿态,然后将所得结果与DGNSS模块获得的位置、速度相组合,进行MIMU/DGNSS组合导航滤波,然后利用滤波结果闭环校正惯导输出的姿态导航参数完成导航输出,同时对惯导系统的传感器误差和数学平台误差进行反馈校正,以进行下一次导航滤波。
1.2 里程比对原理
在卫星信号良好的情况下,高精度DGNSS接收机的载波相位差分技术(Real-Time Kinematic,RTK)定位精度为厘米级,根据该定位精度计算得到的里程结果误差在0.2%内[4],符合 JJG517-2009 《出租汽车计价器》国家检定规程规定的要求。
为了证明本文所提出方法的精度及稳定性,在移动检测车辆上同时放置高精度DGNSS接收机和低成本MIMU/DGNSS组合导航模块,分别独立采集移动车辆的定位信息。把根据高精度DGNSS接收机定位信息计算的里程作为基准里程,由低成本MIMU/DGNSS组合导航模块输出定位信息计算的里程作为测试里程,二者进行比对验证低成本MIMU/DGNSS组合导航模块输出里程的精度。同时,在实验过程中人为对MIMU/DGNSS组合模块进行一段时间拔天线处理,模拟卫星失锁的情况,验证在城市遮挡环境下组合导航模块里程统计结果的精度。
为了避免定位过程中的一些较大定位误差点造成的里程累积误差,影响比对结果的客观性及可靠性。里程比对算法根据高精度DGNSS接收机得到的基准里程把整个测试路段以1km为单位进行切分,并记录车辆每走1km里程的起始和结束的时间点,按照该时间点与组合导航测试数据进行时间匹配,比对每个1km路段内的基准里程和测试里程,评估低成本MIMU/DGNSS组合导航模块输出里程的精度。里程比对流程图如图3所示。
1)首先把基准数据和测试数据进行坐标转换,从空间坐标转为高斯平面坐标。
2)计算基准数据相邻两点间的距离增量,求和后计算基准数据里程。
3)基准里程累计结果每到≥1km记录基准数据时间点及对应1km的实测里程。
4)将基准数据1km处时间点和测试数据时间点进行匹配。
5)若时间可以匹配,求测试数据在匹配时间段内的距离,和基准里程比对,求出误差百分比。
根据上述算法自编的里程比对软件界面如图4所示。
上述软件可读取最原始RTK输出数据及组合导航模块输出数据,然后按照时间匹配结果,比对测试数据每个1km里程段的里程误差;同时,软件可以输出测试数据每个定位点的点位误差,用于辅助分析每个里程段是否存在较大粗差定位点影响测试数据的里程统计结果精度。
2 算例分析
2.1 实验过程
本次实验基准设备为中海达H32 BDS/GPS/GLONASS双频实时动态GNSS接收机,采用网络RTK模式,RTK平面测量精度为±(10mm+1×10-6D),高程测量精度为±(20mm+1×10-6D),基准设备精度满足测试需求。测试设备(低成本MIMU/DGNSS 松组合导航平台)采用东方联星CC50III-BG卫星增强高精度原始设备制造(Original Equipment Manufacturer, OEM)模块,伪距差分情况下平面测量精度为1.5m,高程测量精度为3.0m,载波相位差分情况下平面测量精度为0.5m,高程测量精度为1.0m。模块在实验前已参照上述原理中所述组合导航算法,可在线处理测试数据。
本次实验数据在杭州进行采集,选择卫星信号良好的开阔路段进行测试,利用杭州市当地CORS网为测试设备提供实时高精度差分改正数,实现基准设备和组合模块的差分定位,基准和测试的采样率都为1Hz。实验过程中采用别克商务车作为测试平台,将RTK流动站和差分模块的天线固定在车顶,其相对位置如图5所示(图上贴在车顶上黑色小方块为组合导航模块天线,白色接收机为基准RTK设备,二者位置尽量靠近)。图6所示为低成本组合导航模块,由于模块包含MIMU单元,为了保证移动测量过程中定位点精度,模块按照坐标系Y轴指向,被固定在车内地面上,Y轴指向与车前进方向一致。实验过程中选取不同的路段进行数据采集,同时人为拔天线一段时间模拟卫星失锁的情况,验证在城市遮挡环境下组合导航模块里程统计结果的可靠性及稳定性。RTK流动站采集的数据作为基准数据,模块采集的数据作为测试数据。
本次实验数据分两类进行采集:一类是在开阔条件下采集组合导航模块和基准RTK设备的连续定位数据,定位结果如图7所示;第二类是在测试过程中人为设置几段90s左右拔天线过程,模拟卫星失锁,采集组合导航模块和基准RTK模块的连续定位数据,定位结果如图8所示(黄色点为卫星信号良好状态下组合模块的定位结果,绿色点和红色点为拔天线情况下组合模块的定位结果)。
2.2 实验分析
实验过程中进行了两类验证实验,即:第一类是在开阔条件下采集组合导航模块并且不含拔天线情况;第二类是在开阔条件下采集组合导航模块且含拔天线情况。下面分别对两类验证实验的结果进行分析。
2.2.1 第一类实验
第一类实验,数据在卫星信号良好的开阔条件下采集,保证基准RTK数据的准确性。数据采集过程中,基准设备为定点RTK模式,低成本组合导航模块为定点RTK和惯性组合模式。数据采集结束后,比对算法以1km为单位将组合导航模块测试数据和高精度DGNSS基准里程结果切分,比对每1km里程统计误差。
选取一组实测数据,该组数据记录了4km左右的数据,如图7所示,比对算法将其切分为4段,结果如表1所示。

表1 组合导航模块和基准RTK里程比对结果
2.2.2 第二类实验
第二类实验,数据在卫星信号良好的开阔条件下采集,保证基准RTK数据的准确性。数据采集过程中,基准设备始终为定点RTK模式,组合导航模块人为地设置几段90s左右拔天线过程,未拔天线情况下组合导航模块为定点RTK和惯性组合模式,拔天线后组合导航模块主要依靠惯性递推位置信息,且在重新插上天线过程中,组合导航模块会处于短暂浮点、单点和惯性组合模式定位过程。数据采集结束后,比对算法按照1km为单位将组合导航模块测试数据和高精度DGNSS基准里程结果切分,比对每1km里程统计误差。
选取一组实测数据,该组数据记录了6km左右的数据,如图8所示,比对算法将其切分为6段,结果如表2所示。
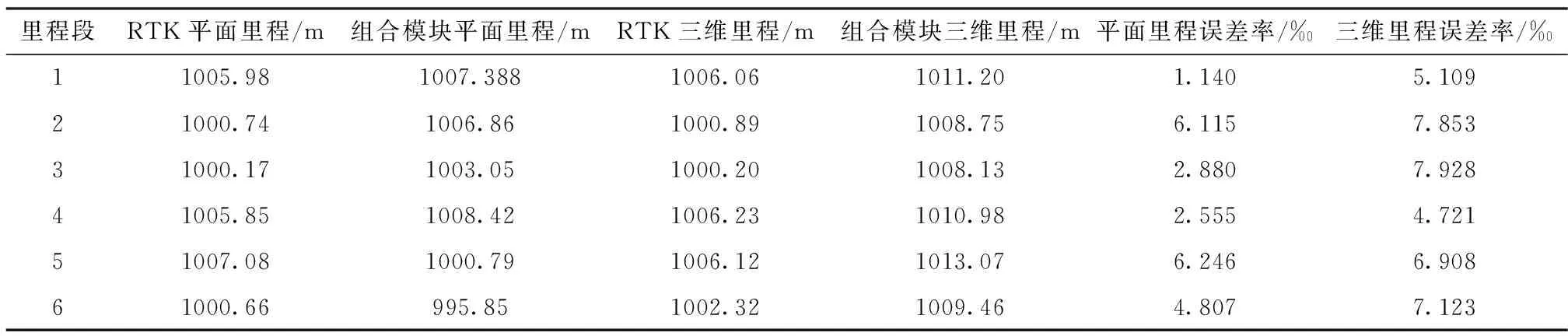
表2 组合导航模块和基准RTK里程比对结果
2.2.3 稳定性实验
为验证上述2组实验结果的稳定性,第一类实验和第二类实验分别重复进行了10组(其中分别包含5组直线段测试和5组曲线段测试),直线段和曲线段的里程长度分别为10km左右;第一类实验直线和曲线三维里程测试比对结果如图9和图10所示。
第一类稳定性实验结果表明:低成本MIMU/DGNSS 松组合导航模块在卫星信号良好(未拔天线)情况下,直线段和曲线段的里程比对误差结果均能稳定在8‰范围内。
第二类实验(含拔天线)直线和曲线三维里程测试比对结果如图11和图12所示。
第二类稳定性实验结果表明:含拔天线(几段90s左右拔天线)情况下,低成本MIMU/DGNSS 松组合导航模块在直线段和曲线段的部分里程比对误差会略大于8‰,实验结果总体稳定在8‰范围内。
2.3 实验结论
1)在第一类实验(未拔天线)中,低成本MIMU/DGNSS 松组合导航模块和中海达H32 BDS/GPS/GLONASS双频GNSS接收机均处于定点RTK模式,低成本组合导航模块卫星单元性能低于H32GNSS接收机,故里程统计结果相较H32GNSS接收机误差约为8‰。
2)在第二类实验(拔天线:几段90s左右拔天线)中,未拔天线时低成本MIMU/DGNSS 松组合导航模块定位方式和第一类实验情况相同;拔天线情况下,低成本组合导航模块可以短时通过惯性递推出实时准确位置信息,最终里程统计误差也稳定在8‰范围内。
3)两类实验结果表明:组合导航模块里程统计精度误差约在8‰范围内,精度等级基本与高精度DGNSS接收,机接近且该组合导航模块成本低、体积小、应用方便,适合大范围应用。按照JJG517-2009《出租汽车计价器》国家检定规程规定的要求:检定标准装置误差小于0.3%,被检出租汽车计价器的误差为+1.0% ~-4.0%。该组合导航模块误差精度约为8‰左右,高于被检出租汽车计价器的误差(+1.0% ~-4.0%),略低于检定标准装置误差0.3%,基本可应用于出租车计价器的移动检定。
3 结论
基于计价器检定背景,本文提出了将低成本MIMU/DGNSS OEM松组合导航模块应用于移动车辆里程统计中,保证了在卫星信号良好及丢失的情况下均能输出较准确的定位信息,满足车辆在城市环境下行驶时卫星信号被遮挡时的应用需求,可以在不影响车辆正常运营的条件下对车辆进行检定,方法简便、效率高,且组合导航模块成本低,可满足广大出租车辆移动检测的需求;同时,设计了一种分段里程比对方法,增加了长距离里程对比结果的客观性。本文实验结果表明,该组合导航模块里程统计精度误差约在8‰范围内,基本可应用于出租车计价器的移动检定,后期可采用更高精度的组合导航模块硬件平台提高输出里程的精度。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
成都信息工程大学学报(2022年2期)2022-06-14
汽车工程师(2021年11期)2021-12-21
今日农业(2021年7期)2021-11-27
好日子(下旬)(2020年6期)2020-08-04
移动通信(2019年2期)2019-03-27
劳动保护(2018年8期)2018-09-12
发明与创新·大科技(2018年2期)2018-03-17
车迷(2017年12期)2018-01-18
CHIP新电脑(2016年7期)2016-07-18
