
基于低频磁信标的全天时自主定位方法
2018-10-15 05:28夏红伟刘超越马广生王常虹
导航定位与授时 2018年5期
王 冠,夏红伟,刘超越,马广生,王常虹
(哈尔滨工业大学,哈尔滨 150001)
0 引言
在现代生产生活中,导航技术关系到生产生活的各个方面[1-2]。以全球定位系统(Global Posi-tioning System, GPS)、北斗为代表的全球导航卫星系统(Global Navigation Satellite System, GNSS)作为当前应用最广的定位导航手段[3],在一些特殊环境下,如地下、水下、室内、城市或高山峡谷等地区,GNSS信号容易受到干扰,有被阻断的风险。此外,基于超声波[4]、光学[5]、超宽带[6](Ultra Wideband, UWB)、射频[7](Radio Frequency, RF)窄带信号的定位方案,典型的如ZigBee[8]技术使用现有的硬件,具有低功耗、低成本的特性,但在室内环境中的性能可能因为多径或带内干扰而降低。低频准静态磁场[9]有2个优势,一是能穿透树叶、土壤、建筑物、水、岩石和许多其他类型的介质;另一个优势是不受恶劣的天气条件和昼夜变化的直接影响。其穿透力强、损失小、不易受干扰等特点[10],使得磁信标定位定向方法显示出独特的优越性和广阔的应用前景,在许多室内和室外的应用十分方便,低频磁信标的使用已经成为一项具有竞争力的技术, 在定位、通信、石油勘探、低空物探及测绘[11]等多个技术领域具有重要的应用前景。
国外学者提出了许多有价值的利用磁场进行导航定位的技术,典型的如美国人Saxena利用地磁匹配手段进行定位[12]。美国雷神公司提出的类GPS方法[13],如图1所示,主要原理是利用3个以上的磁信标,利用差分几何算法仿照GPS定位原理,通过卡尔曼滤波技术进行数据优化。根据已知的绝对位置得到待测目标的实际位置,此研究并未说明具体的解算步骤和相关误差方程等细节问题,但却为利用交变磁场定位提供了一种新思路。意大利人PaTsku提出了磁测距和航位推算融合[14],如图2所示。结合电磁感应定律场源位置与信号接收器的关系,利用三维位置与方向融合的方法进行定位。英国人Markham利用多磁线圈追踪地下生物[15],如图3所示。这种方案的原理依旧是电磁感应原理的相关知识,其设计为天线阵列的布局,信标均悬挂在地面以上1.2m处,如图4所示。Arie Sheinker[16]提出了可以实现平面和立体测量的磁信标定位方法,上述方法具有各自的优势和特点,但大多停留在理论实验验证阶段,实际定位效果如何急需工程实践进行分析验证。
在这种背景下,本文在Arie Sheinker 等研究成果的基础上,研究了一种低频磁信标定位方法,分析了该定位技术的工程应用问题,并通过仿真以及实地陆测、海测等实验验证了方法的有效性和可行性。
1 毕奥-萨伐尔定律
低频磁场定位技术最基本的原理则是静磁学中的毕奥-萨伐尔定律(Biot-Savart Law)。在静磁学中,毕奥-萨伐尔定律于19世纪初期被提出并用于描述电流源与磁场的关系,具体如下
(1)
并且有如下关系,
(2)
(3)
式(2)和式(3)称为毕奥-萨伐尔定律。
毕奥-萨伐尔定律由于在实验中无法得到电荷能在其中做恒定运动的电流元,因而不能直接由实验验证,但是当把它应用到各种电流分布时,计算得到的总磁感应强度和实验测得的结果相符,因而间接证明了其正确性。
2 分离式双信标定位方法
对于一个空心载流线圈产生的磁场,电流I通过N匝的面积为A的线圈,通常产生磁矩表达式
M=A·N·I
(4)
由式(4)知,磁矩M是具有线圈轴线方向的矢量。在大于线圈最大尺寸但小于激励电流的电磁波长的距离上,由线圈产生的磁场可表示为偶极子域。磁感应强度关系式如下[16]
(5)
磁场强度H由式(5)得
H=r-5[3(M·r)r-Mr2]
(6)
这里,r是从测量点到线圈的矢量,μ0是自由空间的磁导率。由式(6)可以看出,磁场强度的大小是磁矩M和r-3的线性函数。
假设要定位的对象仅在x-y平面中移动,因此可以仅使用2个坐标描述其位置
(7)
其中,M1在x方向上具有幅度的信标的磁矩由式(8)给出
(8)
并且有如下关系
(9)
用a1定义2个非零向量之间的比例
(10)
进而化简得
2x2-3a1xy-y2=0
(11)
求得方程的解[16]
(12)
用k1定义反映x、y坐标之间的比例因数
(13)
要实现定位,还需要添加另一个信标,根据上面的分析,第2个信标H2的磁场可由式(14)给出
(14)
根据式(13),可得
x=k1y
(15)
类比式(15)与(3-5),得到传感器位置与第2个信标的位置关系
x=k2(y+R)
(16)
用a2定义2个非零向量之间的比例
(17)
同样类比式(17)与式(13),同时定义k2
(18)
进而得到传感器的位置坐标的表达式
y=Rk2(k1-k2)-1
(19)
因此,通过按照图5配置摆放的一对信标,信标I放在原点,通入频率为f1的正弦信号,信标II放在(0,-R)处,通入频率为f2的正弦信号,使用磁传感器测量2个信标在空间某点所产生的磁场信息,基于锁相环技术可以提取不同频率信标所产生的磁场信息,然后利用式(10)和式(17)分别求出a1和a2,用式(13)和式(18)求出k1和k2,最后代入式(19)和式(15)求出y和x坐标值,从而实现传感器的定位[16]。至此,给出了基于低频磁信标的定位方法原理的推导。
3 数学仿真
下面通过一个仿真实验验证上述方法的有效性。具体步骤为:
1)选择一个恰当合理的待测区域;
2)在这片区域中进行连续的移动,并记录作为目标的实际位置;
3)在每个位置的计算过程中加入零均值和标准偏差(Standard Deviation, STD)为1pT的高斯白噪声;
4)采用分离式双信标定位方法进行位置测算;
5)绘制真实轨迹和融合算法得到的仿真对比图。
以前文的定位算法的研究作为基础,经过仿真发现,通过该定位方法获得的连续定位构建的估计轨迹非常接近实际轨迹,从而验证了本文定位算法的有效性,对比结果如表1所示。
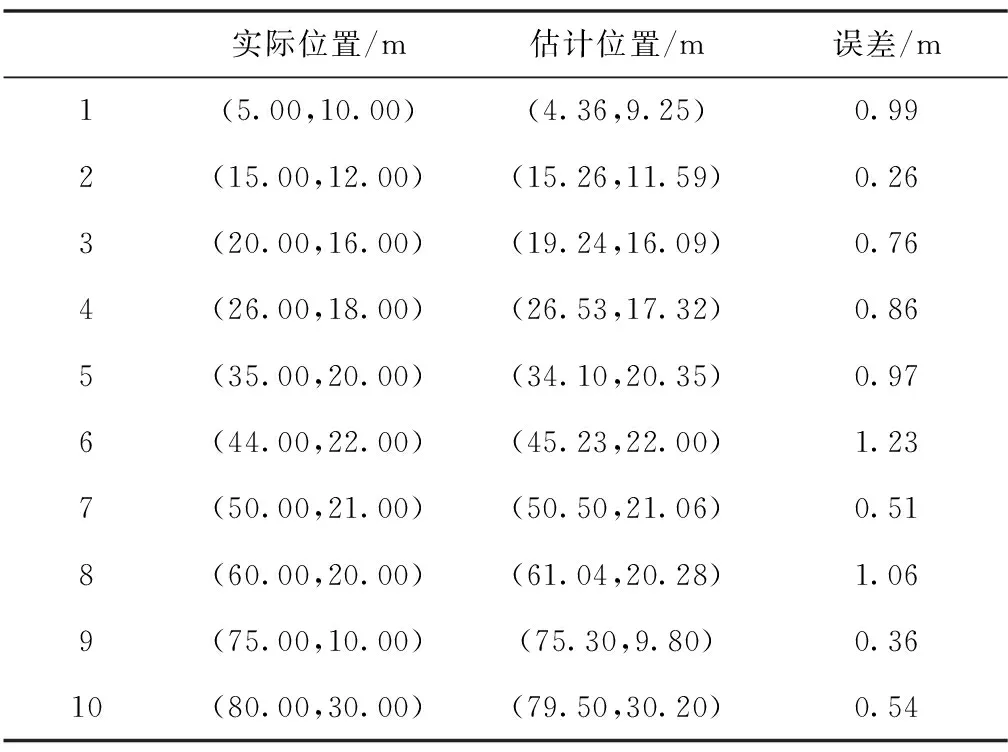
表1 仿真实验位置与估计位置对比
4 实际测试与分析
4.1 系统组成
分离式双信标系统由信标激磁部分、信标本体部分、信号测量及处理部分组成,如图6所示。实验中所采用磁通门传感器测量范围为±70μT~±250μT,带宽DC~1kHz,精度为0.01nT。
4.2 陆测结果
为了验证上述定位方法的实际性能,首先在陆地上进行了相关测试,信标系统实物如图7、图8所示,单个信标设计为边长为1.5m的正方形,220匝,2个信标中心相距1.6m,工作时通入电流3.5A,电阻6Ω左右。
将实验测量得到的估计位置与实际位置进行对比,并把陆测结果总结如表2所示。
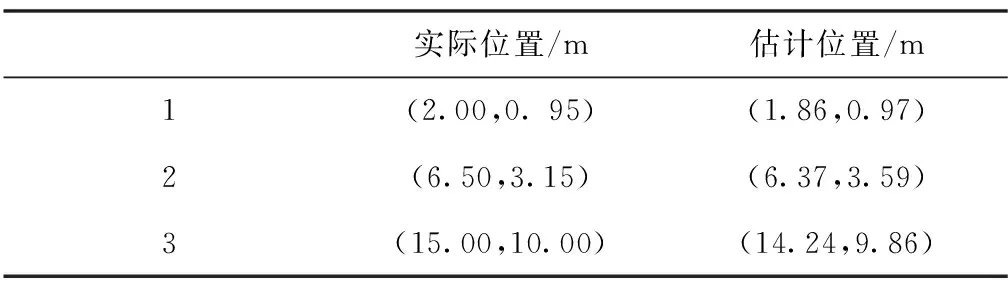
表2 陆地测试实际位置与估计位置对比
4.3 海测结果
为了进一步验证这种低频磁信标定位方法在更苛刻的环境下的测量效果,进行了海下定位测试,退潮时的信标安装位置如图9所示,实验时海水完全淹没信标。工作时通入电流7.5A,电阻6Ω左右。
将海上实验测量得到的估计位置与实际位置进行对比,并把海测结果总结如表3所示。
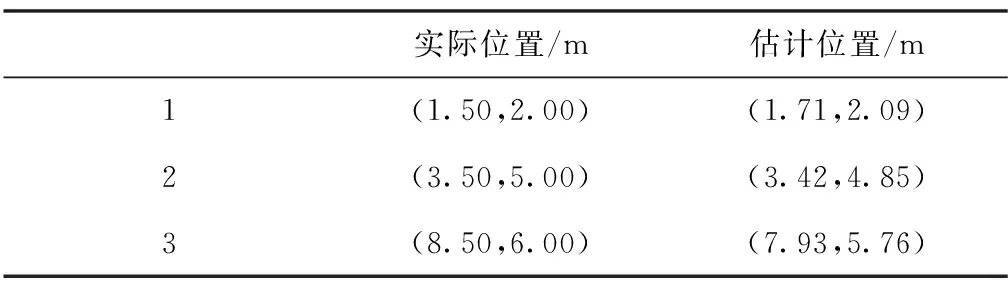
表3 海上测试实际位置与估计位置对比
4.4 信标安装特性
磁信标在工程应用中需要考虑安装误差特性,通过实际实验测试,该信标定位系统具有以下特点:
1)对信标之间的距离要求不高,即可以间隔一定距离安装,也可以紧贴着安装(见图10和图11),实际测试磁强信号变化小于5%;
2)信标与传感器的正交关系存在3°以内的误差时,实际测试误差小于5%;
3)实际测试表明,信标可摆放在任意位置,对信标是否按照地球磁极方向摆放要求不高。
5 结论
1)本文研究了一种基于低频磁信标的全天时自主定位方法,分析了分离式双信标定位原理,并给出了数学仿真精度分析;
2)通过工程实验验证了该方法的可行性,实际实验表明,信标安装要求简单,可以适应水下、地下、室内等环境,适应性强,该方法在几十米的范围内可以达到亚米级定位精度;
3)磁信标自身误差、传感器的对准误差等因素对系统定位精度的影响分析是下一步研究要解决的问题。
猜你喜欢
当代陕西(2022年6期)2022-04-19
舰船科学技术(2021年7期)2021-08-11
华人时刊(2020年13期)2020-09-25
导航定位与授时(2020年5期)2020-09-23
中国外汇(2019年20期)2019-11-25
海峡姐妹(2018年2期)2018-04-12
人大建设(2018年12期)2018-03-21
现代电子技术(2017年11期)2017-06-12
中学生数理化·高二版(2016年12期)2017-02-28
发明与创新·大科技(2016年5期)2016-05-17
