
小型对流层飞艇动力系统选型及性能匹配分析
2018-10-15 08:02荣海春
西安航空学院学报 2018年5期
李 翔,荣海春,吴 晴
(中国电子科技集团公司第三十八研究所 浮空平台部,合肥 230088)
0 引言
飞艇区别于其他飞行器的明显特征是:飞艇是依赖轻于空气的气体所产生的浮力而升起的飞行器[1]。与传统飞机、直升机相比,飞艇具有造价及运营费用低、噪声污染小、可实现长时滞空停留、起降场地简单、覆盖面广阔的优点,是理想的空中平台,在军事和民用领域具有巨大的应用价值[2-3]。
动力系统是飞艇平台的重要系统之一,对于在对流层高度巡航飞行的飞艇平台,航空活塞发动机由于具有质量轻、尺寸小、耗油率低、价格低廉等一系列优点,被广泛应用为功率输出源;空气螺旋桨作为推进器,在工作过程中吸收活塞发动机输出的轴功率,将其转换为驱动飞艇前飞的拉力/推力,二者相组合构成了对流层飞艇动力系统的主要组成部分。考虑到飞艇平台的性能好坏在很大程度上取决于其所配备的动力系统性能优劣,在满足飞艇功率需求下所进行的发动机选型及性能计算、动力系统与飞艇平台的性能匹配分析就显得至关重要[4]。
1 动力系统功率配置
飞艇需用推进功率Pn取决于其设计飞行速度vd和对应此速度下的飞行阻力Fd[1]:
Pn=Fdvd
(1)
其中飞艇阻力Fd与当地空气密度ρ、飞艇体积V、飞行速度vd及阻力系数Cd相关[1]:

(2)
由于飞艇体积巨大,飞行阻力较大,而且多采用软式结构,因此其设计飞行速度远低于固定翼飞机。较低的飞行速度、巨大的艇体体积以及附加惯性,使飞艇较易受到飞行环境(风速、风向)的影响。因此,若仅按需用推进功率配置飞艇动力,往往会导致在飞艇加速飞行和姿态调整的过程中,不能提供令人满意的加速度和响应,即没有足够的动力余量用于完成加速或机动飞行。这将在飞艇起飞加速和转向调姿的过程中带来严重的操控困难,极大影响飞艇的适航能力和任务执行能力[5]。
通过查阅相关资料,搜集整理世界上主要飞艇型号的动力系统配置情况,归纳得到如图1所示的飞艇设计飞行速度与功率比的统计对比信息,统计中涵盖了从不足1000 m3至100000 m3以上的约50种不同体积量级的对流层飞艇。图中所列出的功率比定义为飞艇实际配置功率与对应设计飞行速度下的需用推进功率之间的比值。其中,需用推进功率可按照式(1)、式(2)进行计算。考虑到这里仅仅是对动力系统配置的一般惯例进行初步的探讨,因此根据计算流体动力学(Computational Fluid Dynamics,CFD)计算结果,将各型飞艇所对应的阻力系数统一取为较为保守的0.04。
根据上述统计结果,对于设计飞行速度较高(大于30 m/s)的飞艇,一般按照需用推进功率的2至3倍配置装艇功率;对于设计飞行速度较低(小于20 m/s)的飞艇,考虑到低速飞行时推进系统效率相对较低,在动力系统方案设计中需要预留较多的动力余量,一般按照需用推进功率的4至8倍配置功率;对于设计飞行速度介于20~30 m/s范围内的中速飞艇,一般按照需用推进功率的2至6倍配置功率。
2 动力系统选型实例
应用上述功率配置准则进行某小型飞艇的动力系统选型,相关过程如下:
某小型飞艇的体积为500 m3,巡航速度50 km/h,巡航高度2 km。巡航飞行状态下,动力系统需在满足飞艇平台推进需求的同时还需驱动艇载发电机,为艇载设备和任务载荷提供电力,设计状态下所对应的尖峰用电功耗为1.6 kW。
由式(2)计算得到,该飞艇巡航阶段所对应的飞行阻力约为245 N(阻力系数0.04)。需用推进功率为3.4 kW。按照上述动力系统功率配置准则,考虑到该型飞艇设计飞行速度仅为50 km/h,动力系统的功率比按照中间值6进行配置。亦即,在2 km的巡航高度下,所需配置的用于推进的功率应为20.4 kW;按巡航阶段系统用电功耗1.6 kW计算,考虑到三相交流永磁发电机的技术发展现状,可将轴功率到电功率的转换效率近似取为0.7,则艇载发电机由发动机曲轴上提取的轴功率为2.3 kW。综合分析之后得出结论:对应2 km巡航高度,动力系统所需提供的功率应能同时覆盖推进需求和用电需求,亦即应不小于22.7 kW。
对于没有配备涡轮增压器的活塞发动机,其输出功率会随飞行高度的增加而有所下降,并存在以下关系[6]:
(3)
式中,N为发动机输出功率,单位kW,P为环境压力,单位Pa,T为环境温度,单位K,下标O和H分别对应地面工作状态和海拔高度为H时的工作状态。
代入数据计算得到,2 km处的发动机输出功率仅为地面状态下的0.781倍,则该型飞艇动力系统的实际配置功率应不小于29.1 kW。
鉴于以上分析,将该飞艇动力系统配置为2台LimbachDL275E二冲程航空活塞发动机。单台发动机最大功率约为16 kW,动力系统装艇总功率32 kW。
在根据飞艇平台功率需求完成发动机选型之后,根据飞艇艇载推进器“大桨径、小桨距”的选型准则[7-9],综合考虑后将艇载推进器确定为34×12(英寸)的固定桨距两叶拉力螺旋桨。
3 动力系统性能计算
3.1 螺旋桨特性
所选定的34英寸直径、12英寸螺距的螺旋桨特性曲线如图2所示,相关的螺旋桨性能参数根据本单位开发的基于叶素理论的仿真软件计算得到。

图2 螺旋桨特性曲线
螺旋桨拉力系数和功率系数的定义如下[10]:

(4)
(5)
式中,T为螺旋桨拉力,单位N,P为螺旋桨所吸收的功率,单位W,ns为螺旋桨每秒钟所对应的转数,D为螺旋桨直径,单位m。

图3 螺旋桨拉力-空速特性

图4 螺旋桨扭矩-空速特性
图3、图4分别为对应2 km巡航高度下的螺旋桨拉力-空速特性和螺旋桨扭矩-空速特性。图5为2 km巡航高度下,对应不同飞行速度的螺旋桨扭矩-转速特性。图中所列出的计算结果均对应为理想状态下的螺旋桨输出拉力值和需用扭矩值,其中未考虑任何装机损失。

图5 螺旋桨扭矩-转速特性
根据上述计算,可以得出如下结论:
(1)螺旋桨拉力与其转速成正比;在转速相同的工作条件下,拉力随飞艇飞行速度的增加而有所降低。
(2)螺旋桨旋转阻力矩与其转速成正比;在转速相同的工作条件下,旋转阻力矩随飞艇飞行速度的增加而有所降低。
(3)对于给定的飞行速度和螺旋桨转速,可以对应唯一的螺旋桨拉力和螺旋桨旋转阻力矩。飞艇飞行速度较低时,随转速增加,螺旋桨旋转阻力矩趋于一致;飞艇飞行速度较高时,螺旋桨旋转阻力矩与转速基本呈线性关系。相同转速条件下,飞艇飞行速度越大,螺旋桨旋转阻力矩越小。
3.2 发动机输出特性
对于没有采用涡轮增压技术的活塞发动机,高空状态下的发动机输出功率可根据式(3)计算得到。相对应地,当地高度状态下的发动机输出扭矩可根据计算得到的功率值代入式(6)计算得到。
(6)
式中,T为发动机输出扭矩,单位为N·m,P为发动机当地功率,单位为kW,n为转速,单位rpm。
对应2 km巡航高度下,发动机输出功率-转速特性和输出扭矩-转速特性随转速的变化关系如图6、图7所示。图中同时给出了地面状态下所对应的发动机输出特性,二者均对应进气压力最大(发动机节风门全开)的工作状态。

图6 发动机功率-转速特性
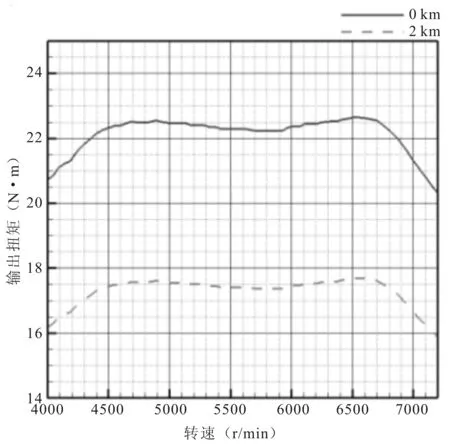
图7 发动机扭矩-转速特性
4 动力系统与飞艇平台性能匹配分析
4.1 性能匹配准则
图8为对应2 km巡航高度下飞艇拉力-空速特性,包含飞艇平台需用拉力(与飞行阻力相等)随飞行速度的变化关系和单台发动机所需提供的拉力随飞行速度的变化关系。因飞艇平台采用双发拉进的动力系统配置方案,单台发动机所需提供的拉力为飞艇在对应空速下需用拉力的1/2。

图8 飞艇拉力-空速特性
将2 km巡航高度下的单发需用拉力曲线与对应该巡航高度下的螺旋桨拉力-空速曲线(图3)进行比对,两族曲线的交点即为飞艇需用拉力与动力系统输出拉力相等的匀速飞行状态点。在确定飞艇飞行速度之后,通过对两族曲线的交点进行分析,可以得到螺旋桨为满足飞艇推进需求所需具备的转速,即为螺旋桨目标工作转速。螺旋桨目标工作转速与飞艇飞行速度一一对应。
根据2 km巡航高度下的螺旋桨扭矩-转速曲线(图5),可以得到螺旋桨对应目标工作转速下的旋转阻力矩M1。考虑到动力系统采用了螺旋桨直驱的结构形式,螺旋桨转速应与发动机转速相等。根据2 km巡航高度下的发动机输出扭矩曲线(图7),可以得到发动机在节风门全开的状态下,以该目标工作转速运转时所能输出的最大扭矩值M2。对两个扭矩值进行比对,若M2>M1,即可判定动力系统满足飞艇平台以对应速度巡航飞行时的推进需求;(M2-M1)即为在满足推进需求前提下的发动机剩余扭矩,将其值带入式(6),可反算得到对应该工况下,发动机可提供给艇载发电机的最大轴功率,若考虑发电效率之后仍可覆盖艇上设备及任务载荷用电需求,即可判定动力系统与飞艇平台匹配良好,动力系统可同时满足飞艇平台推进需求和设备用电需求。
4.2 性能匹配分析
根据上述匹配准则,在螺旋桨拉力-空速特性曲线(图3)的基础上引入单发需用拉力随飞艇平台飞行速度的变化曲线,得到螺旋桨与飞艇平台之间的驱动力平衡曲线,如图9所示。其中,螺旋桨拉力值在前述理论计算结果的基础上考虑了15%的装机损失。

图9 驱动力平衡曲线
由图9中可以看出,飞艇平台以50 km/h的速度巡航飞行时,近似匹配于螺旋桨转速4500 rpm的工作状态。4500 rpm即为飞艇平台以50 km/h的速度巡航飞行时所对应的螺旋桨目标工作转速。
在螺旋桨扭矩-转速曲线(图5)的基础上引入2 km巡航高度下的发动机输出扭矩曲线,得到发动机与螺旋桨之间的驱动力矩平衡曲线,如图10所示。

图10 驱动力矩平衡曲线
由图10中可以看出,对应于50 km/h的巡航速度,螺旋桨在4500 rpm目标转速下的旋转阻力矩约为7.5 N·m。根据飞艇平台总体设计需求,巡航阶段艇载设备及任务载荷用电功耗尖峰值为1.6 kW,考虑到轴功率到电功率的转换效率0.7,则艇载发电机由发动机曲轴上提取的功率最大应为2.3 kW,所对应的发电机转子旋转阻力矩可根据式(6)进行计算。代入数据计算,可以得到艇载发电机转子旋转阻力矩最大值为4.9 N·m。综合考虑之后可以得到:在同时满足飞艇平台推进需求和设备用电需求的条件下,发动机曲轴所需输出的扭矩应为螺旋桨旋转阻力矩和发电机转子旋转阻力矩之和,即为12.4 N·m。
因为发动机与螺旋桨之间的连接采用了直驱的结构形式,螺旋桨目标转速即为该工况下所对应的发动机工作转速。根据发动机扭矩-转速特性曲线(图7)可以看出,发动机在以4500 rpm的目标工作转速运转时,所能输出的最大扭矩值(对应节风门全开的状态)约为17.5 N·m,大于上文中所述12.4 N·m的目标值。亦即,发动机可同时覆盖飞艇平台动力推进需求和设备用电需求,即可判定动力系统与飞艇平台匹配良好。在实际飞行过程中,通过对节风门开度进行调节,可以使得发动机在某个确定的节风门开度下,以4500 rpm目标转速运行时所输出的扭矩等于螺旋桨旋转阻力矩与发电机转子旋转阻力矩之和,使得螺旋桨转速保持恒定(即为目标转速)。此时,螺旋桨拉力与飞艇阻力相等,艇载发电机输出功率满足用电需求,飞艇平台进入准静态匀速飞行状态。
5 结语
(1)综合考虑动力系统推进效率和余量储备等因素,对于低速飞艇(设计飞行速度小于20 m/s),应按需用推进功率的4至8倍配置动力推进功率;对于高速飞艇(设计飞行速度大于30 m/s),应按需用推进功率的2至3倍配置动力推进功率;对于设计飞行速度介于20~30 m/s范围内的中速飞艇,应按照需用推进功率的2至6倍配置动力推进功率。对于飞艇平台从动力系统中取用的发电能耗或充气所用能耗,应在动力推进功率之外予以考虑。
(2)飞艇作为低速飞行器的典型代表,其动力系统由发动机、螺旋桨及其他附属设备组成。本文以某飞艇的方案设计为例,对动力系统功率配置及发动机的初步选型方法进行了简要介绍。
(3)动力系统与飞艇平台的性能匹配是飞艇设计中的关键内容。本文所介绍的方法将动力系统与飞艇平台的性能匹配解耦处理为螺旋桨与飞艇平台的驱动力平衡和发动机与螺旋桨的驱动力矩平衡,二者统一于需用螺旋桨转速这一重要参数。在通过计算分别得到对应目标飞行高度及飞行速度下的飞艇阻力特性、发动机输出特性和螺旋桨性能之后,可将螺旋桨拉力与飞艇阻力平衡和螺旋桨需用扭矩与发动机输出扭矩平衡作为动力系统与飞艇平台性能匹配与否的判据。上述方法为动力系统与飞艇平台的匹配分析乃至飞艇平台的飞行性能预测提供了解决方案和有效手段。
猜你喜欢
热带作物学报(2021年1期)2021-02-22
舰船科学技术(2020年6期)2020-11-27
航空发动机(2020年3期)2020-07-24
无人机(2019年10期)2019-12-17
琴童(2018年1期)2018-03-26
中学科技(2017年10期)2017-11-04
航空模型(2016年10期)2017-05-09
太空探索(2016年12期)2016-07-18
太空探索(2015年3期)2015-07-12
太空探索(2015年3期)2015-07-12
