
无人机尾旋特性分析及其改出策略
2018-10-15 08:01:24屈高敏李二博李继广
西安航空学院学报 2018年5期
屈高敏,李二博,李继广
(西安航空学院 飞行器学院,西安 710077)
0 引言
大迎角飞行能力是现代高性能战机基本要求,也是各种民用飞行器操作过程中不可以避免的一种状态。但是,大迎角飞行是一种十分危险的飞行状态,是诱发尾旋事故的重要因素[1]。尾旋事故具有改出困难、伤亡率高等特点,是飞机面临最危险的情景之一。据美国对2000年至2013年96起A类重大无人机事故统计报告显示,无人机事故率远高于有人机。其中,操作失误引起的事故占到了总事故量的31%[2]。因此,提高无人机处理各种事故的应急能力至关重要。
尾旋是一种非线性特性强、状态耦合严重、舵面操纵效率低的过失速飞行运动。所以,在尾旋状态下,很难对无人机的飞行状态进行调整。因此,根据尾旋发生的机理对各飞行状态进行时序性控制至关重要[1]。文献[3-5]指出,对尾旋飞行状态认知识别是尾旋控制的关键。同时,由于舵面操纵效率限制,在对尾旋进行改出控制时,面临着舵机速率饱和所引起的振荡问题。
针对尾旋改出控制和舵机速率饱和问题,研究人员提出很多解决方法。黄汉桥等人在认识尾旋特性的基础上,提出了动态逆设计方法[1]。刘凯提出了舵机饱和约束条件下的尾旋改出方法[6]。Sinha N K提出了滑模控制方法[7]。Herrmann G针对饱和控制问题提出了动态逆方法[8]。Yildiz Y 应用控制分配方法解决了舵面饱和问题[9]。Backstepping设计方法具有处理非线性的能力,并且可以根据系统的相应要求,严格实现控制要求,相较于其它非线性控制方法具有明显的优势[10-13]。另外,尾旋控制的时序性是十分适合应用Backstepping方法来处理。
本文针对无人机的尾旋特性,分析了尾旋发生的机理。并根据尾旋过程中,强非线性、耦合性和舵机速率饱和的问题,提出了时序控制策略。
1 尾旋机理分析
1.1 尾旋状态下无人机的运动
某无人机图片和尾旋下落时的状态如图1所示。从图1可知,该机为一款大展弦比、电力驱动的常规布局无人机。在进入深度尾旋状态后,无人机几乎以垂直角度下坠。

图1 某无人机实物和尾旋下落时的状态
无人机进入尾旋后的坠落轨迹如图2所示。从图2可知,尾旋下坠过程中,无人机的运动状态呈现螺旋下降轨迹。
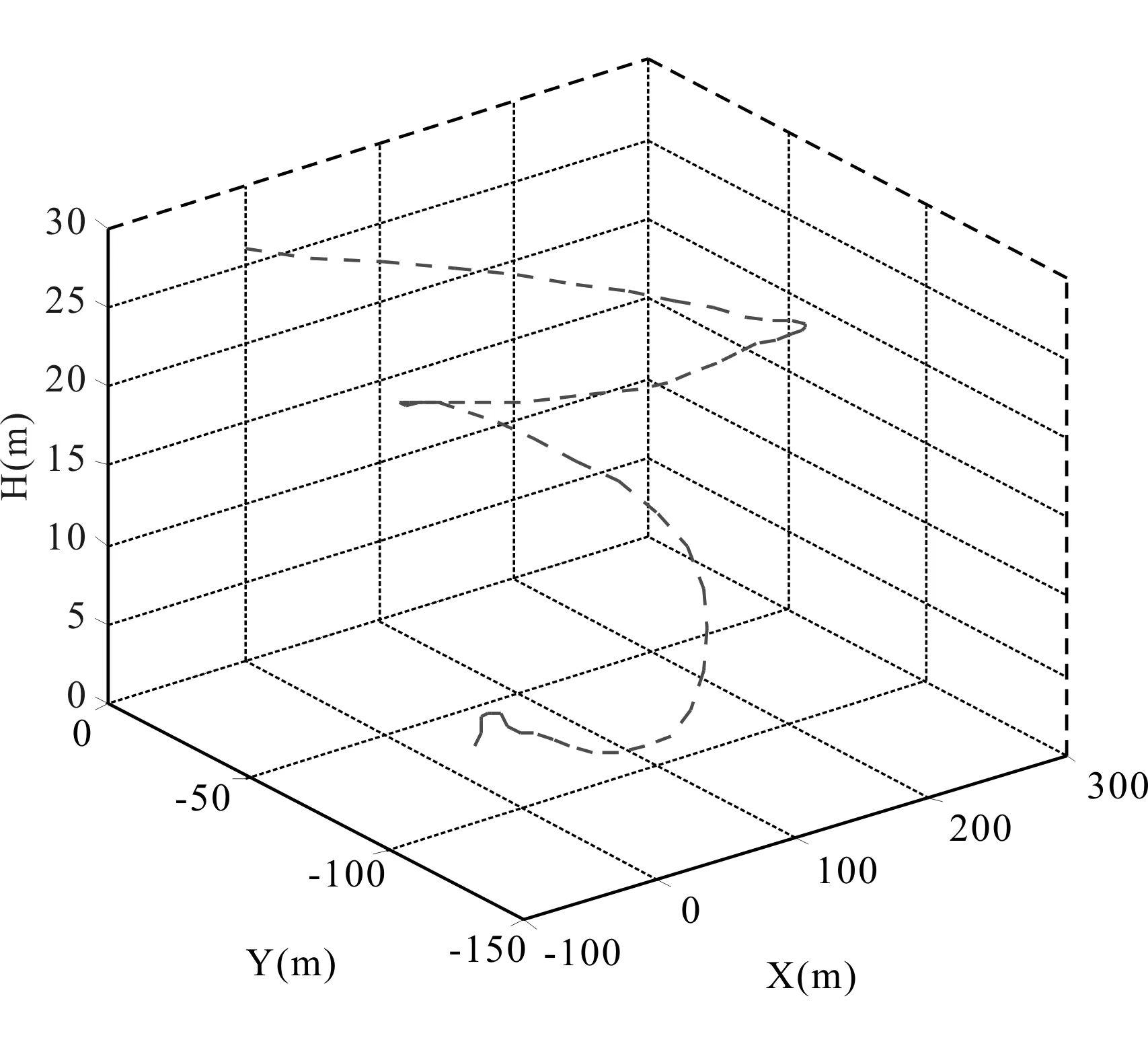
图2 无人机进入尾旋后的坠落轨迹
1.2 尾旋特性分析
无人机从稳定飞行状态到深度尾旋过程的姿态角响应如图3~图5所示。
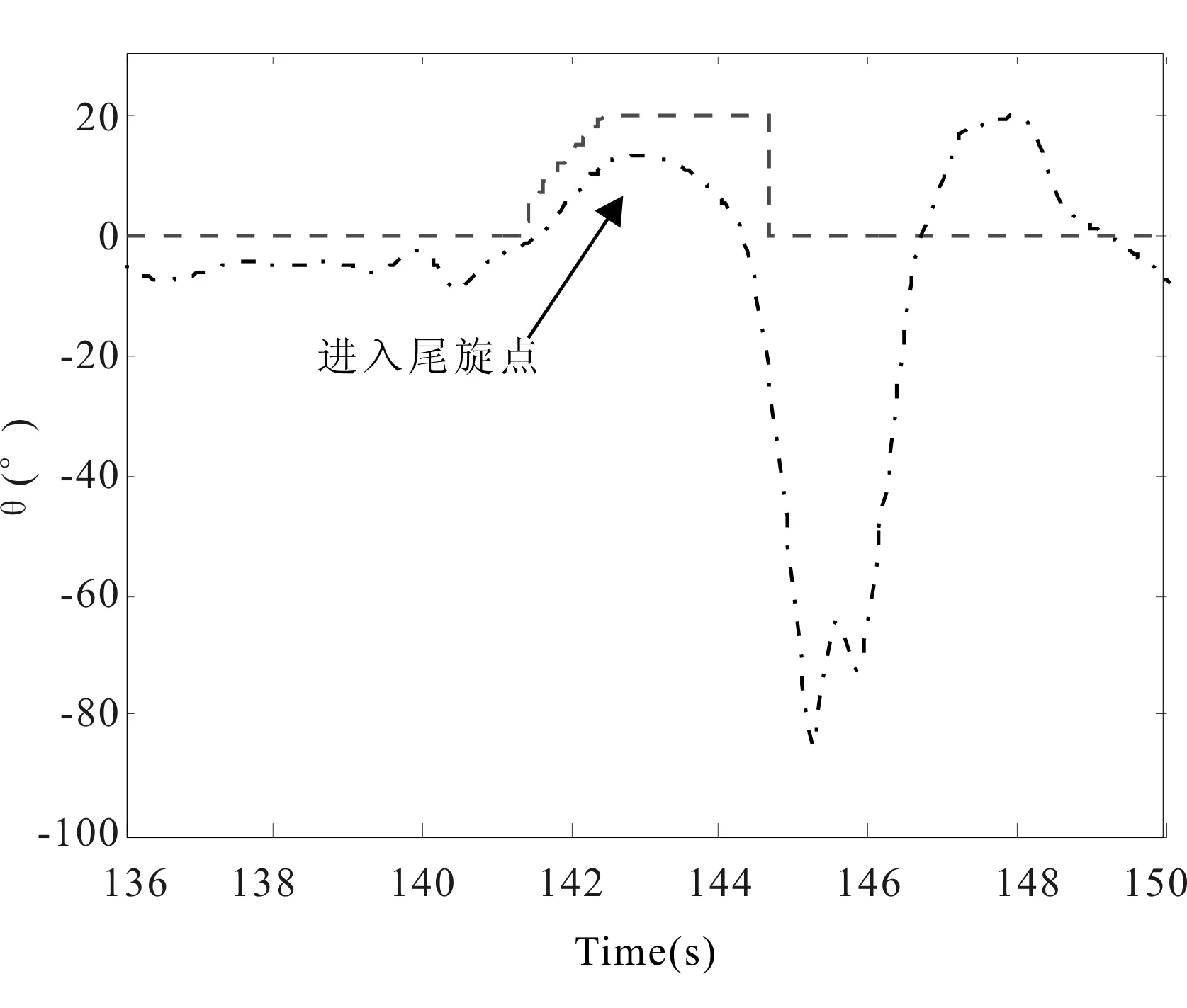
图3 无人机俯仰角响应
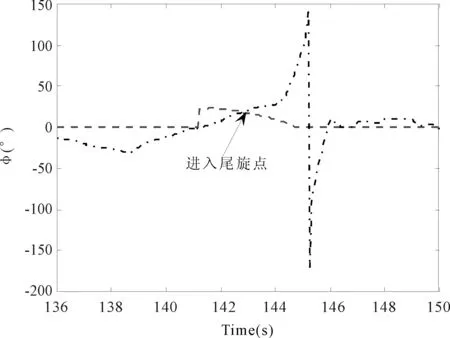
图4 无人机滚转角响应
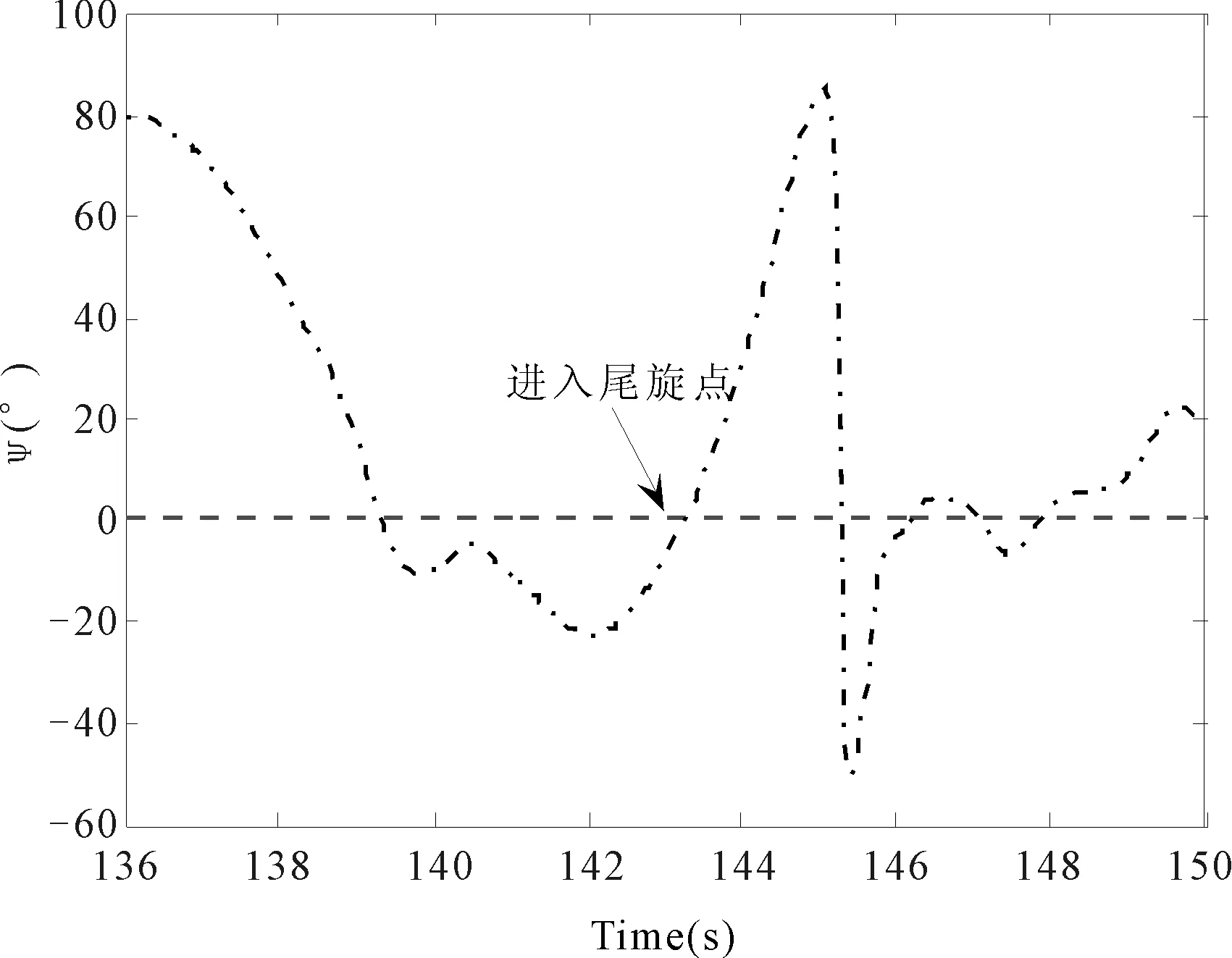
图5 无人机偏航角响应
无人机从平飞到尾旋的姿态响应过程可知,此次尾旋事故的直接诱因是俯仰角快速拉升使得无人机快速抬头,从而造成迎角超过失速迎角而引发的。失速迎角状态使得无人机升力减小,无人机快速低头、滚转坠落,引发尾旋事故。
1.3 尾旋机理分析
从该无人机尾旋事故实例和历史上众多的尾旋事故来看,尾旋事故的诱因大多为大迎角状态下的失速。尾旋的直观表现包括机翼自旋、航向发散和滚转发散等等。
机翼自旋主要是由机翼上的法向力所引起,类似于气动力(力矩)系数,定义无人机机翼自旋系数为CS,则:
CS=CLcosα+Cdsinα
(1)
式中,CL是升力系数,Cd是阻力系数,α是飞行迎角。
一般情况下,无人机的升阻比在10以上。因此,自旋系数中起主要作用的是升力系数。在失速迎角条件下,迎角增大,无人机的升力系数减小;迎角减小,无人机的升力系数却增大。因此,此时自旋阻尼是使无人机自旋加速。
无人机机翼自旋则会引起侧滑角的产生。侧滑角的存在使得无人机左右机翼升力不对称,使得无人机的航向发生改变。此时,无人机方向舵的方向稳定性丧失,使得无人机航向发散。
同时,侧滑还会引起无人机绕速度轴滚转。无人机在绕速度矢量转动时,会导致惯性耦合效应的产生。假设无人机在滚转时的侧滑角很小,则机体轴角速度到气流坐标系的转换可通过下式表示:
(2)
(psqsrs)T和(pqr)T分别为气流坐标系和机体坐标系的角速度。则惯性力矩可表示为:
Mic=(Iz-Ix)pr
(3)
(4)
由式(3)和式(4)可得:

(5)
由式(5)可知,惯性耦合引起的俯仰力矩的大小和气流坐标系下滚转角速度的平方成正比,且随2倍相对迎角的正弦值快速变化。惯性耦合力矩的存在使得无人机的迎角进一步增大。
2 尾旋控制策略
从上面分析可知,尾旋的根本原因是迎角太大而引起的失速和失速过程中伴随着滚转和偏航现象。因此,对尾旋改出的根本在于对迎角的控制。然而,深度尾旋状态下直接控制无人机的迎角反而会带来更加严重的后果。原因如下:第一,升降舵等控制舵面存在角速率限制和偏转角度限制。在这些物理条件限制下,舵面的操纵效率不足以直接将无人机从失速状态下改出。第二,在大迎角失速状态下,无人机的气动舵面操纵效率下降。第三,在滚转角较大的情况下,对无人机的迎角进行控制会增加无人机的惯性耦合上仰力矩,使得失速情况更加恶化。
因此,对尾旋的改出控制要在降低滚转和偏航的前提下进行。也就是说,尾旋改出控制的关键是控制指令下达的时序特性。根据以上分析,则对尾旋改出的控制顺序如下:
Step 1:抑制滚转。主要依靠副翼舵面,对尾旋改出控制首先要给出滚转控制指令,以消除滚转带来的惯性耦合力矩。
Step 2:减小迎角。对迎角控制是尾旋改出的核心。当无人机的滚转降低之后,迅速给出迎角控制指令。对迎角的控制一般采用升降舵。但是,此时升降舵的操纵效率依然很低。因此,该步骤对迎角控制的目的仅仅是将无人机的迎角减小到失速迎角之下。
Step 3:姿态控制。当无人机的迎角减小到失速迎角之后,接下来应对无人机的姿态进行调整。如果无人机还具有一定的高度,应保持一段时间的俯冲加速,使得无人机重新获得速度,以提高接下来尾旋改出气动舵面的操纵效率。
Step 4:当无人机获得一定的速度,滚转和偏转得到有效抑制后,给出拉平和爬升指令,使得无人机从尾旋俯冲状态下改出。
这种时序控制策略不仅针对尾旋特性进行了针对性的操作,而且避免多通道控制带来的耦合影响。
3 结语
本文通过一起事故,分析了无人机尾旋事故机翼自旋、航向发散和滚转发散等现象发生的机理,并在尾旋机理分析的基础上,得出了尾旋改出的关键在于对迎角的控制。分析了在深度尾旋状态下,直接控制无人机的迎角反而会带来更加严重的后果,通过采用时序控制策略,有效解决了尾旋控制面临着气动舵面操纵效率低、耦合严重,以及控制舵面的角速率饱和而诱发姿态振荡等问题。
猜你喜欢
实验流体力学(2023年1期)2023-03-21 01:41:06
装备环境工程(2022年9期)2022-10-13 05:17:14
兵器装备工程学报(2021年12期)2022-01-11 04:30:04
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
装备制造技术(2020年1期)2020-12-25 05:18:18
空间科学学报(2020年4期)2020-04-22 01:17:20
智富时代(2019年2期)2019-04-18 07:44:42
北京航空航天大学学报(2016年3期)2016-02-27 06:32:03
飞行力学(2015年5期)2015-03-15 12:04:54
科技传播(2014年4期)2014-12-02 01:59:42
