
近空间可变翼飞行器爬升/巡航段切换控制
2018-10-13 08:17:58徐文萤郑亚龙蒋烁莹
电光与控制 2018年10期
徐文萤, 江 驹, 郑亚龙, 蒋烁莹
(南京航空航天大学自动化学院,南京 210016)
0 引言
近空间可变翼飞行器是指在近空间区域内飞行且飞行器机翼外形结构可变化的飞行器。高超声速可变翼飞行器采用翼身融合,外形结构呈三角形,具有强耦合、快时变、不确定性和严重非线性等特性[1-3]。对于可变翼飞行器来说,机翼外形的变化必然对飞行器的气动特性和稳操性能带来较大的影响,小翼伸缩模态切换过程中,飞行器的气动参数发生了很大变化,导致飞行器飞行模态的变化,所以需要进行相应的控制器切换。不同模态间如果采取硬切换的方法,可能会引起飞行器的状态以及控制参数发生大幅度的跳变,并可能导致系统不稳定,因此设计平滑的切换器对切换过程尤为重要。
惯性环节切换方法,俗称淡化器(GSM),规定原始控制律加权系数在切换时间内从1减到0,而新控制律的加权系数从0增加到1,通过惯性延迟环节来抑制切换瞬态产生的跳变,使得控制器平滑切换。针对变体飞行器的控制问题,文献[4] 设计了一种鲁棒控制器,采用平滑切换线性变参数(LPV)鲁棒控制方法,建立变体飞行器切换LPV模型,设计平滑切换控制器;文献[5]针对民机不同模态间的切换,引入惯性延迟淡化器抑制切换瞬态,这种切换方法结构简单,适用于控制律变化不大的模态切换过程,当控制结构复杂或控制律变化较大时,该方法对切换瞬态的抑制效果较差;文献[6]针对受到扰动的变机翼后掠角近空间飞行器考虑一类多输入多输出的多模型切换系统,提出了一种模糊自适应鲁棒控制方法;文献[7]针对含有有界扰动和模型参数跳变的离散时间系统,提出基于动态模型库的多模型切换控制方法,制定模型切换函数准则,建立动态优化模型,节省了大量的计算时间。
滑模变结构控制方法与一般传统控制方法相比,具有响应速度快、鲁棒性强、对参数变化反应不敏感等特性[8-9]。针对X-33A飞行器,文献[10]提出一种应用于发射段和再入段的滑模变结构控制器,具有良好的姿态控制效果和鲁棒性能。虽然滑模变结构控制方法具有一系列的优点,但是传统滑模控制方法仍然存在收敛速度慢、抖振严重等问题。文献[11]提出的快速幂次趋近律的控制方法具有较快的收敛速度;文献[12]提出双幂次趋近律滑模控制方法用以实现机器人控制,解决了收敛速度慢的问题,但仍存在严重的抖振;文献[13]将双幂次趋近律与几种传统的趋近律进行对比,发现双幂次趋近律具有更快的收敛速度以及更好的运动品质。
本文在对上述文献研究的基础上,将滑模控制与惯性环节切换结合,提出一种基于惯性环节的双幂次趋近律滑模切换方法。在切换过程中,利用惯性延迟环节对切换前后的滑模面进行淡化处理,得到新的切换控制律滑模面,然后针对新的滑模面设计快速双幂次滑模切换控制律,最后通过直接切换方法和本文方法的对比仿真分析,得出快速双幂次滑模切换具有良好跟踪控制效果的结论。
1 近空间可变翼飞行器数学模型
1.1 动力学模型
在爬升段,由于飞行器消耗大量的能量转化成动能和势能,因此引入质量为状态变量[14],可得近空间飞行器的纵向动力学模型[15]为
(1)
(2)
(3)
(4)

(5)
(6)

1.2 推力模型
将飞行器的发动机推力模型等效为对应的二阶模型[16],具体表达式为
(7)
式中:ζ为阻尼比;ω为发动机固有频率;βc表示发动机节流阀的调定值。
发动机的推力[17-19]及燃料比冲[20]算式分别为
(8)
(9)
(10)
式中:CT为发动机推力系数;ρ为大气密度;Ma为飞行马赫数。
巡航段推力[21]算式为
(11)
1.3 气动力模型
飞行器受到的升力和阻力算式分别为
(12)
(13)
式中:s是参考面;CL是升力系数;CD是阻力系数。由于CL和CD与迎角α及马赫数Ma相关,其函数关系插值曲面分别如图1、图2所示。

图1 升力系数插值曲面Fig.1 Lift coefficient interpolation surface
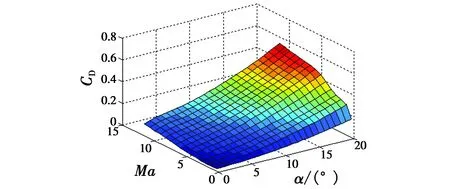
图2 阻力系数插值曲面Fig.2 Resistance coefficient interpolation surface
2 滑模变结构控制器设计
2.1 爬升/巡航分控制器设计
首先针对近空间飞行器的爬升段和巡航段进行分控制器的设计,两段均选取双幂次趋近律滑模控制律。
将控制输入量单独提取后得到系统精确反馈线性化后的模型为
(14)
式中:
(15)
(16)
(17)

(18)
2.2 快速双幂次趋近律滑模控制律
近空间飞行器跟踪控制系统,其设计的目标是寻找合理的控制变量δe和βc,通过控制系统使得飞行速度V和飞行高度h能够很好地跟踪设定的指令信号Vd和hd。本文爬升段和巡航段的控制律均采用双幂次趋近律滑模控制[22]。
跟踪误差为
eV(t)=V(t)-Vd(t)
(19)
eh(t)=h(t)-hd(t)。
(20)
针对飞行器纵向模型选择积分滑模面[23]为
(21)
式中,λV,λh为待设计正常数,积分项用于消除稳态误差。
滑模面S对时间t求导,为
(22)
对S微分后有
(23)

(24)
将飞行器的全状态反馈线性化模型代入式(24),得到
(25)

(26)
即
(27)
(28)
若det(BBT)≠0,则矩阵非奇异。
(29)
因为b11b21≠b12b22,即det(BBT)≠0,矩阵BBT为非奇异矩阵,(BBT)-1存在,式(27)成立。
设计双幂次趋近律为
(30)
式中:kV1,kV 2,kh1,kh 2>0;0<αV,αh<1;βV,βh>1;sgnSV,sgnSh为符号阶跃函数。
滑模控制器由两部分组成,分别为式(27)等效控制项和式(30)双幂次趋近律控制项
(31)
2.3 稳定性分析
对设计的双幂次趋近律滑模控制的可达性进行验证,首先定义李雅普诺夫函数
(32)
李雅普诺夫函数求导得到



(33)

当系统中存在有界的不确定干扰时,控制系统的稳定性存在如下定理。
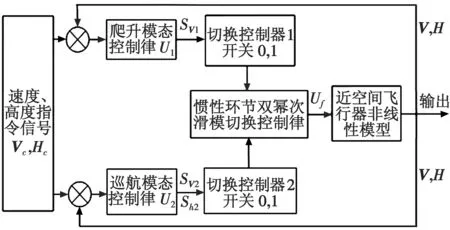
定理1当飞行器系统中存在外界不确定性有界扰动时,即ΔFV (34) (35) 证明 将不确定干扰项代入式(30),得到 (36) 式中,ΔFV,ΔFh为不确定干扰的误差项。 (37) 进一步将式(37)变换为 (38) 根据上述证明分析可知,当t→∞时 (39) (40) 上述证明验证了系统在有限时间内收敛的特性,但是并未推导出具体的收敛时间。 定理2基于双幂次趋近律的滑模变结构飞行控制系统收敛到零的时间为 (41) 证明 当系统状态远离滑模面时,由于0<αV,αh<1,βV,βh>1,所以式(36)中的第二项和参数摄动项对趋近速度影响不大,因此不考虑第二项和参数摄动项的影响,式(36)简化为 (42) 对式(42)两边积分得 (43) (44) 当系统状态接近滑模面时,因为0<αV,αh<1,βV,βh>1,所以式(36)中的第一项和参数摄动项对趋近速度影响不大,因此不考虑第一项和参数摄动项的作用,式(36)简化为 (45) 对式(45)两边积分得 (46) (47) 最后得到系统的收敛时间为 (48) 近空间飞行器在爬升段结束后向巡航初始段进行切换时,需要进行控制律的切换。本文选取直接切换、惯性环节切换以及基于惯性环节的滑模切换控制3种切换控制方法进行研究。爬升/巡航切换控制系统结构如图3所示。 图3 爬升/巡航切换控制系统结构图Fig.3 Climb/cruise switching control system 当飞行器处于爬升段时采用爬升滑模控制器,此时切换控制器1处于“1”开启状态,切换控制器2处于“0”关闭状态。当飞行器处于爬升段转巡航段时开启切换控制器2,采用基于惯性环节的滑模切换控制器,此时切换控制器1和2都处于“1”开启状态。进入稳定巡航段时,关闭切换控制器1,采用巡航段滑模控制器控制。 2.4.1 直接切换律 本文研究了爬升段以及巡航段之间的切换控制,假设爬升段控制律输出为U1,巡航段控制律输出为U2,模态切换的初始时刻为t0。直接切换的算法为 (49) 2.4.2 惯性环节切换律 飞行器在t0时刻进行爬升/巡航模态切换,到t1时刻切换过程结束,原控制律U1的加权系数是e-a(t-t0),可以看出,在初始时刻t0加权系数为1,末时刻t1加权系数为e-a(t1-t0);新控制律U2的加权系数是1-e-a(t-t0),可以看出,在初始时刻t0加权系数为0,末时刻t1加权系数为1-e-a(t1-t0)。惯性环节切换的具体算法为 (50) 参数a是影响淡化性能的主要因素,a的值越大,模态控制律切换的时间就越短。 2.4.3 基于惯性环节的滑模切换律 当近空间飞行器在t0时刻由爬升模态向巡航模态切换时,就需要控制律在短时间内完成切换。整个过程控制律变换为 (51) 式中,Ut是切换过程的控制律,即 Ut=aU1+bU2。 (52) 而在双幂次趋近律滑模切换控制律的设计中,将控制律输出U1和U2按加权系数相加的过程变为滑模面SV1和SV 2以惯性环节加权系数相加形成切换过程滑模面,为 SV=SV1e-a(t-t0)+SV 2(1-e-a(t-t0)) (53) Sh=Sh1e-a(t-t0)+Sh 2(1-e-a(t-t0)) (54) (55) 爬升段初值、期望终值以及指令信号分别为V0=590 m/s,h0=3528 m;Vf=4590 m/s,hf=33 528 m;Vd=590+10t,hd=3528+75t。巡航段的指令信号为Vd=4590 m/s,hd=33 528 m。 飞行器模型在400 s时刻由爬升段模型切换到巡航段模型,设定控制律切换的初始时刻为398 s,切换结束时刻为403 s。 仿真验证对比3种切换控制的效果:图4给出了飞行器速度和高度响应曲线;图5给出了飞行器的状态航迹角、迎角以及俯仰角速率的变化曲线;图6给出控制输入舵面偏转角以及油门开度的变化曲线。 图4 速度和高度响应曲线Fig.4 Response curves of speed and altitude 图5 航迹角、迎角及俯仰角速率变化曲线Fig.5 Curves of track angle,angle of attack and pitch rate 图6 升降舵偏角与油门开合曲线Fig.6 Curves of elevator and throttle opening and closing 近空间飞行器在整个过程中跟踪速度和高度指令时,实际速度和高度信号与指令信号存在误差,定义速度和高度误差分别为 eV=V-Vd (56) eh=h-hd。 (57) 图7给出了飞行器速度误差和高度误差变化曲线。 图7 速度误差与高度误差Fig.7 Speed error and height error 由图6可以看出,若采用直接切换的方式,飞行器在切换瞬间升降舵偏角存在剧烈的跳变,很有可能导致升降舵失效,油门开度瞬间跳变。而惯性环节切换以及双幂次趋近律滑模切换控制能在切换瞬间减弱升降舵和油门开度的跳变,防止升降舵因剧烈跳变导致失效,保证飞行器的安全。抖振存在的原因,可能是系统的惯性,在初始切换的瞬间采用的滑模切换仍可能存在一定的抖振现象,但是相比于直接切换,切换的平滑性得到很大改善。对于滑模控制抖振这个现象,后期可以加入一些智能控制方法做进一步的抖振抑制研究。 根据图7可以看出,双幂次趋近律滑模切换控制方法能保证更小的速度和高度跟踪误差,提高飞行器跟踪精度。 近空间可变翼飞行器在进行两个不同模态间的切换时,需要设计切换控制律来保证两个模态的平滑稳定过渡。本文对比分析了直接硬切换、惯性环节切换以及基于惯性环节的双幂次趋近律滑模切换3种切换控制方法的切换效果。仿真结果表明,双幂次趋近律滑模切换控制能更好地抑制升降舵偏角在切换瞬间的跳变,且具有更好的跟踪精度。





2.4 爬升/巡航切换控制律
3 仿真验证







4 结论
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
电子制作(2018年2期)2018-04-18 07:13:25
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
小学科学(学生版)(2016年1期)2016-10-09 01:53:02
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
