作动器惯性质量对主动悬架幅频特性的影响∗
2018-10-13 02:20王兴野张进秋刘义乐彭志召
汽车工程 2018年9期
王兴野,张进秋,刘义乐,张 建,彭志召
(陆军装甲兵学院车辆工程系,北京 100072)
前言
与传统的被动悬架相比,主动悬架能较大幅度地提高悬架的振动抑制能力,改善车辆的乘坐舒适性,是未来悬架的发展方向[1-4]。近年来,国内外学者提出了多种结构的作动器,如直线电机式[5]、齿轮齿条式[6]、滚珠丝杠式[7-9]、液压马达式[10]和行星齿轮式[11-13]等,对主动控制算法[14-16]等方面也进行了大量的研究,但在作动器特性分析和控制算法设计过程中,多数文献中都没有考虑或忽略了惯性质量的影响,且缺乏科学的依据,特别是对于齿轮齿条式和滚珠丝杠式等基于“旋转电机+运动转化装置”的作动器,由于各旋转部件转动惯量的存在和传动机构对电机转动惯量的放大作用,此时的等效惯性质量通常都不应忽略。
现有的研究成果中,文献[7]~文献[9]中以滚珠丝杠式馈能悬架为研究对象,对馈能阻尼器的等效惯性质量对其阻尼特性和幅频特性的影响进行了理论和试验研究;文献[12]和文献[13]中针对一种多级盘型电机和周转齿轮结构的作动器,考虑了惯性负载产生的制动力矩并提出了其等效计算方法,定性分析了惯容对平顺性、最大控制力和耐久性的影响;文献[17]中设计了一种基于滚珠丝杠和永磁同步电机的调谐惯性质量电磁换能器,并仿真分析了惯性质量对能量回收效果的影响;此外,考虑到惯性质量与惯容器本质上的一致性,还有文献研究了惯容器在反共振隔振器和主动吸振器等隔振系统中的应用[18-20],但以齿轮齿条式作动器为研究对象,分析惯性质量对主动悬架幅频特性影响的研究未见报道。
本文中以齿轮齿条式作动器为研究对象,从理论上分析了惯性质量对主动悬架幅频特性的影响,并通过台架试验进行了验证。
1 作动器结构与惯性质量计算
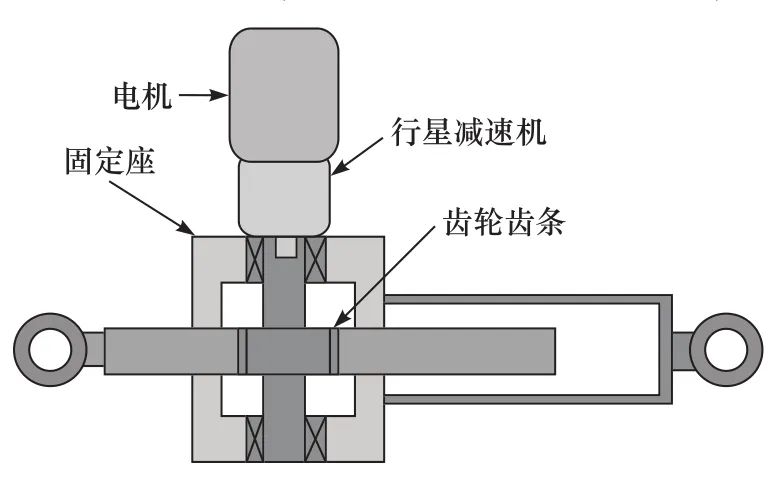
图1 齿轮齿条式作动器结构
齿轮齿条式作动器结构如图1所示,主要由电机、行星减速机、齿轮齿条和固定座等组成。电机采用SEM-80C10303HN型交流伺服电机,具有功率较高、响应迅速的特点,是作动器的动力来源,其具体参数如表1所示;行星减速机采用APE80-16型减速机,通过键与安装在固定座上的齿轮相连,在作动器中起减速增矩作用,具体参数如表2所示;齿轮分度圆半径 Rg=0.0285m,转动惯量 Jp=1.3×10-4kg·m2,齿条采用圆柱形结构,固定座上相应位置装有一铜衬套,起导向和减小与齿条之间摩擦的作用,齿轮齿条在作动器中起运动转化作用,将减速机传来的电机转矩转化为直线上的主动控制力。
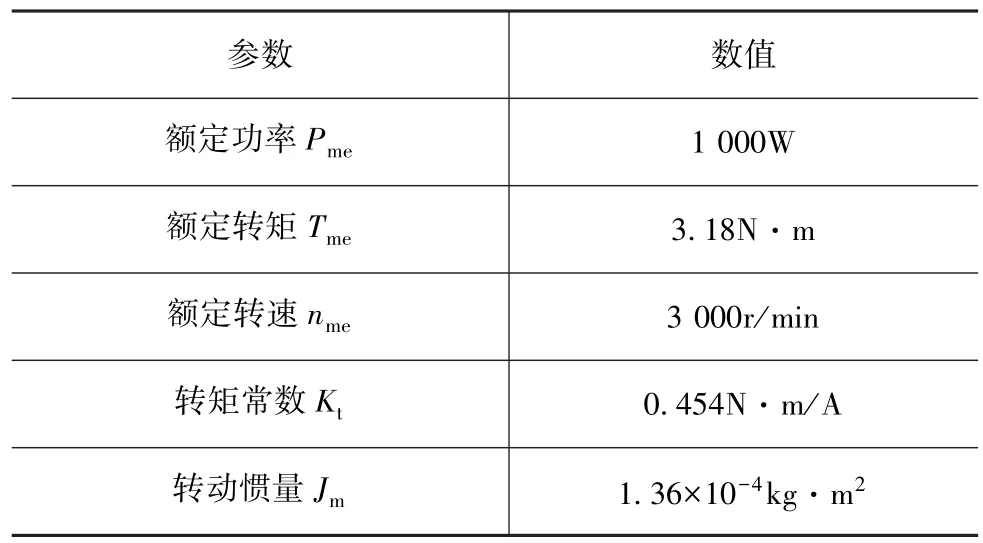
表1 伺服电机主要参数
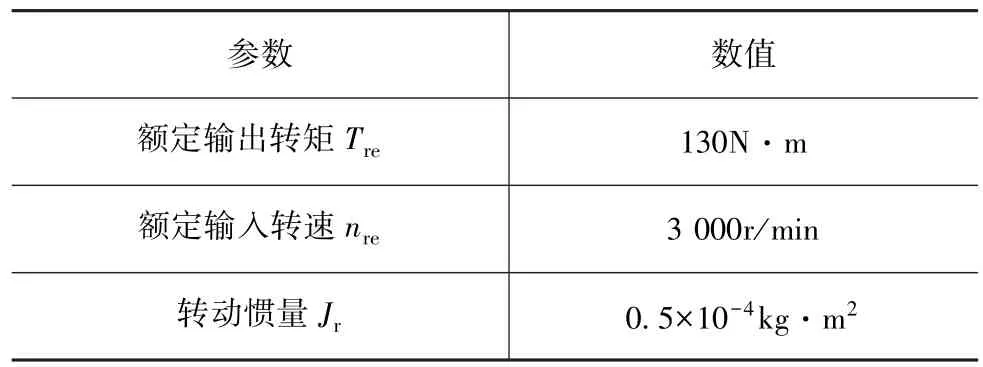
表2 行星减速机主要参数
作动器的惯性质量主要由电机、行星减速机和齿轮的惯性质量3部分组成。行星减速机在对电机输出转矩进行放大的同时,也导致对电机惯性质量的放大。作动器的惯性质量mi为

通过计算可以看出,由于作动器采用的是小齿轮、大传动比减速机的结构,电机和行星减速机的转动惯量所对应的惯性质量占总惯性质量的99.73%,作动器总的惯性质量主要由电机和行星减速机的转动惯量决定,而齿轮的惯性质量可忽略不计。
2 惯性质量对悬架固有频率的影响
采用齿轮齿条式作动器的主动悬架系统可简化为2自由度1/4车辆悬架模型,如图2所示。惯性质量导致悬架系统的状态方程发生变化,根据模型可建立如下动力学方程:
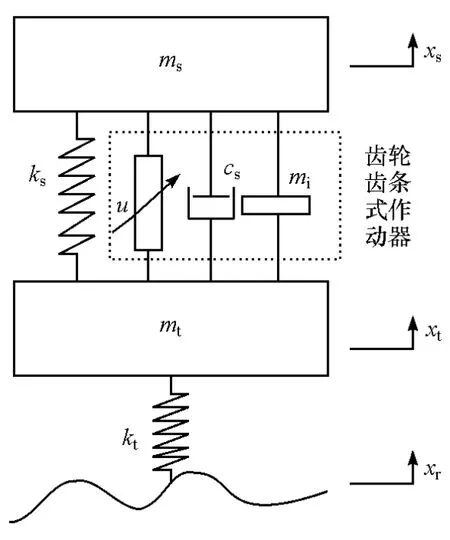
图2 1/4车辆主动悬架模型
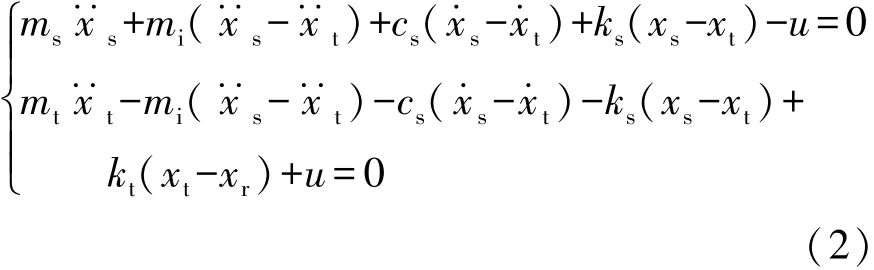
式中:ms为簧载(车体)质量,ms=312.5kg;mt为非簧载(车轮)质量,mt=43.5kg;ks为悬架刚度,ks=20kN/m;kt为车轮刚度,kt=180kN/m;cs为作动器等效阻尼系数,cs=1800N·s/m;u为主动控制力;xr为路面不平度激励;xs和xt为车体和车轮的垂直位移。
略去cs,u和xr,将式(2)化为无阻尼自由振动方程:

从方程可以看出,惯性质量mi增加了车体ms与车轮mt振动的耦合程度。若车轮不动,即令xt=0,则由式(3)可得只有车体ms的单自由度无阻尼自由振动方程:

其固有圆频率为

同样,若车体不动,即令xs=0,则由式(3)可得车轮的单自由度无阻尼振动方程:

其固有圆频率为

由此可知图2所示的双质量系统中只有1个质量振动时的2个偏频为ωs0和ωt0。当惯性质量mi=0时,系统与传统的被动悬架系统一致,两者对比可以看出,惯性质量的引入会导致车体和车轮固有频率的降低。
当整个系统无阻尼自由振动时,设ms和mt以相同的圆频率ω和相角φ作简谐运动,振幅分别为xs0和 xt0,则式(3)的解为

将上面的解代入式(3)得

方程组有非零解的条件就是其系数行列式为零,即

上式可化为

其中a=msmt+msmi+mtmi

式(8)称为该双质量系统的特征方程,它的2个根即为系统主频率ωs和ωt的平方

3 惯性质量对悬架传递特性的影响
惯性质量的引入不仅对悬架的固有频率有影响,也会对悬架的传递特性造成影响。由于采用不同控制算法时,式(2)中的主动控制力u的计算方法不同,此处分别以对低频振动有较好控制效果的天棚控制(sky hook control,SH)和对中高频振动有较好控制效果的加速度阻尼控制(acceleration damping driven control,ADD)为例[21],分析惯性质量对悬架传递特性的影响。
SH主动控制力为

式中csky为天棚阻尼系数,csky=3000N·s/m。
ADD主动控制力为

式中α为调整系数,α=2。
将式(10)代入式(2)并进行Laplace变换得

其中A11=(ms+mi)s2+(cs+csky)s+ks

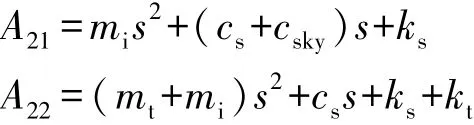
因此由式(12)可得到车体加速度、悬架动行程和车轮动变形与路面不平输入间的传递函数分别为
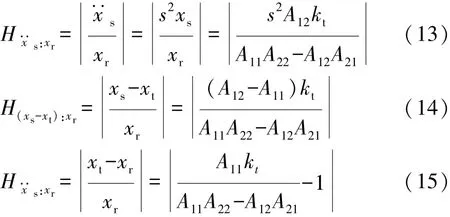
若令 csky=0,mi=0,则反映的是传统被动悬架(traditional passive, TP);若令 csky=0,mi=58.78kg,则反映的是作动器处于被动无控制状态(actuator in passive,AP)。将式(11)代入式(2)并进行Laplace变换,采用同样的方法可算得ADD控制条件下悬架性能的传递函数,限于篇幅此处不再赘述。根据求得的悬架性能的传递函数,可绘制悬架在4种不同控制条件下的幅频特性曲线,如图3所示。
由图3(a)可见:惯性质量的引入有利于降低车体共振区到中频区的车体加速度传递率,但同时也造成了中频区到高频区振动的显著恶化;SH主动控制在中低频区域有较好的振动抑制效果,但同时会进一步加剧中频区到高频区的振动;主动控制对低频区和车轮共振区的振动略有恶化,但在中高频区域有较好的振动控制效果。
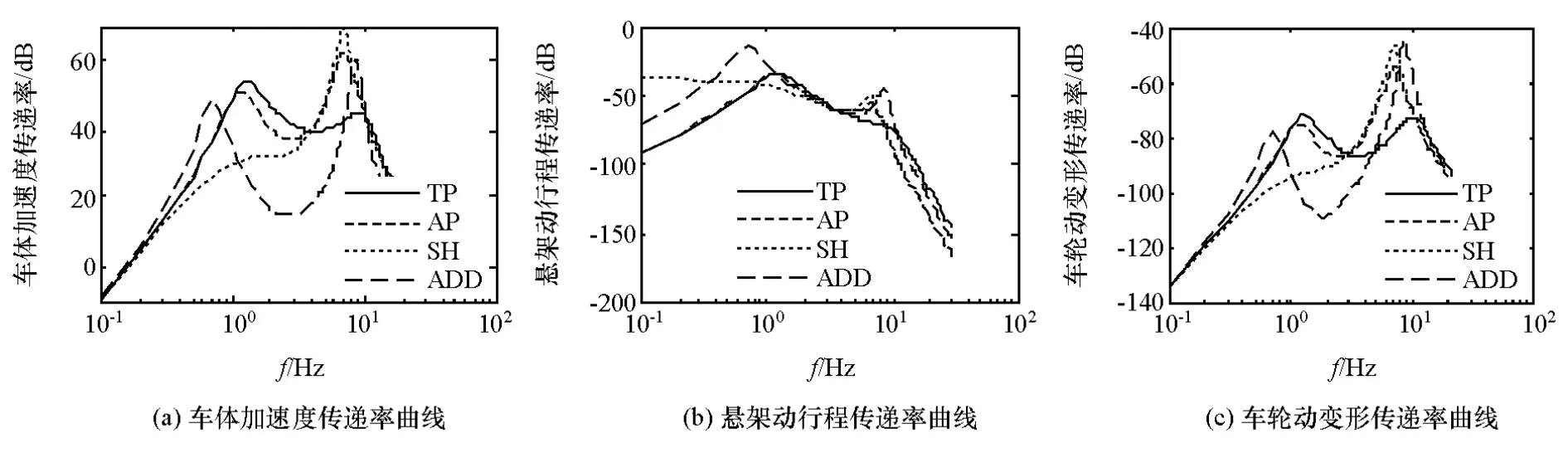
图3 悬架性能传递率曲线
由图3(b)可见:惯性质量的引入有利于降低车体共振区到中频区和高频区的传递率,但同时也增加了中频区到车轮共振区的传递率;主动控制增加了低频区和车轮共振区的传递率,降低了车体共振区和高频区的传递率;ADD主动控制与之基本相近。
由图3(c)可见:惯性质量的引入有利于降低车体共振区到中频区和高频区的传递率,但同时也显著增加了中频区到车轮共振区的传递率;SH主动控制可较为显著地降低中低频区域的传递率,但同时也进一步增加了中频区到车轮共振区的传递率;ADD主动控制增加了低频区和车轮共振区的传递率,但同时显著降低了车体共振区和中频区的传递率。
综合图3进行整体分析可以看出:惯性质量的引入降低了车体和车轮的共振频率,验证了前文的理论分析;惯性质量的引入有利于降低车体加速度、悬架动行程和车轮动变形在中低频区域的传递率,但同时也增加了中频区到车轮共振区的传递率,对比SH和ADD两种主动控制算法可以看出,中高频振动控制效果较好的ADD控制更适用于作动器含惯性质量的主动悬架系统。
4 台架试验与结果分析
悬架振动试验台的结构如图4所示。其中,振动控制仪用于对路面激励系统的信号进行选择和控制,悬架模型单元模拟1/4车辆悬架,包括簧载质量、悬架弹簧、非簧载质量和模拟车轮刚度弹簧。布置在悬架模型单元中的位移传感器、加速度传感器和力传感器采集悬架系统振动过程中的状态信息,并传递给悬架控制系统,悬架控制系统根据上位机设置的控制策略对采集的悬架状态信息进行计算和处理后,向电机驱动器发出控制信号,实现对作动器的主动控制。

图4 悬架振动试验台
为验证前面所述惯性质量对主动控制的影响,采用C级路面10m/s速度下的随机激励对悬架的振动控制性能进行40s的测试,分别采用SH控制和ADD控制。同时为了对比,还分别对传统的被动减振器和作动器无控制条件下的减振性能进行了试验。悬架减振性能通常采用车体加速度、悬架动行程和车轮动载荷3个指标进行评价,下面分别从时域和频域角度对4种不同悬架条件下的减振性能进行分析。
4.1 频域分析
首先对3项性能指标进行频域分析。利用试验数据绘制相应的功率谱密度(power spectrum density,PSD)曲线,如图5所示。与图3中相应状态下的传递特性相对比可以发现,试验结果与传递特性分析结果一致。惯性质量的引入有助于提高中低频区域的振动控制效果,但同时也造成了中高频区域的振动抑制效果的显著恶化;由于SH控制主要是提高低频控制效果,作动器处于天棚主动控制条件下时,中高频区域的这种恶化反而加重;而ADD控制在中高频有较好的振动控制效果,有助于缓解惯性质量在中高频区域造成的恶化。
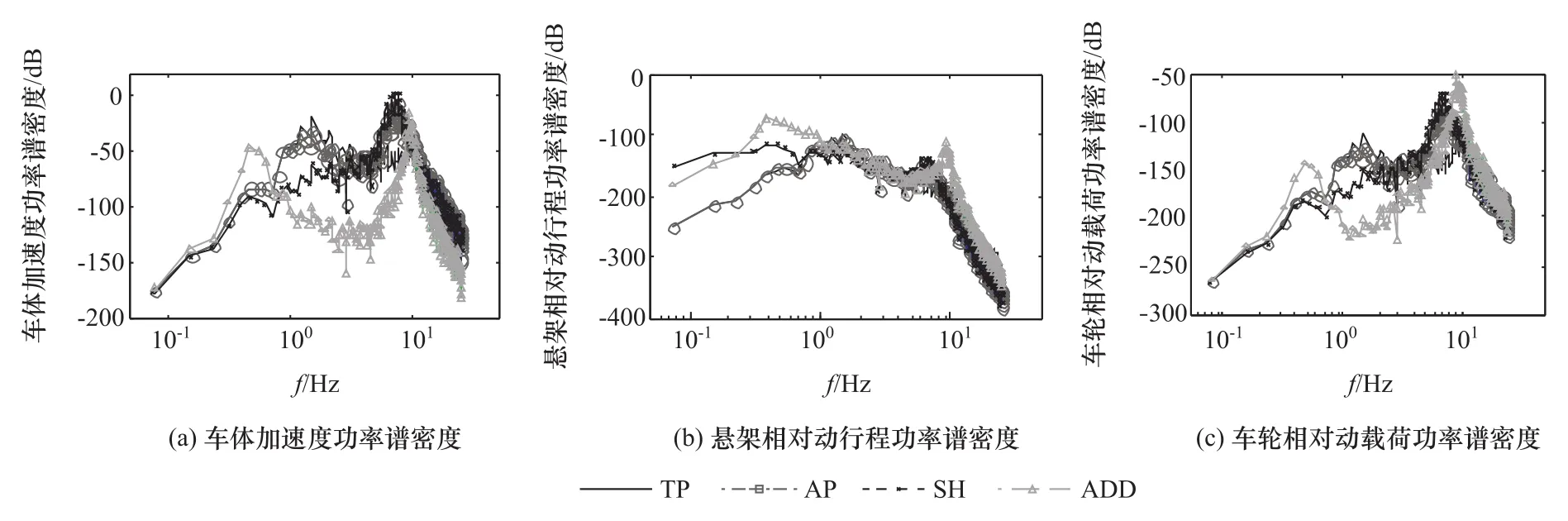
图5 悬架性能功率谱密度
4.2 时域分析
进一步对试验数据进行时域分析。为显示清晰和便于观察,截取5~6s的一段数据,如图6所示,对整个试验过程中的数据进行统计计算并对悬架动行程和车轮动载荷进行归一化处理,结果如表3所示。由图6和表3可见:惯性质量的引入使悬架相对动行程均方根值降低了3.77%,但同时导致车体加速度和车轮相对动载荷均方根值分别增大了36.13%和4.51%,从而导致车辆乘坐舒适性和车轮接地性的恶化;SH主动控制不能对惯性质量造成的减振性能的恶化起到缓解作用,反而使两项指标的恶化程度分别增大到50.37%和36.79%;而ADD主动控制使车体加速度均方根值降低了11.06%,但同时悬架相对动行程和车轮相对动载荷均方根值也分别增大了15.09%和34.34%;两种控制算法相对比可以看出,ADD主动控制效果优于SH主动控制。因此,对于作动器含惯性质量的主动悬架系统,应选择中高频控制效果较好的控制算法。
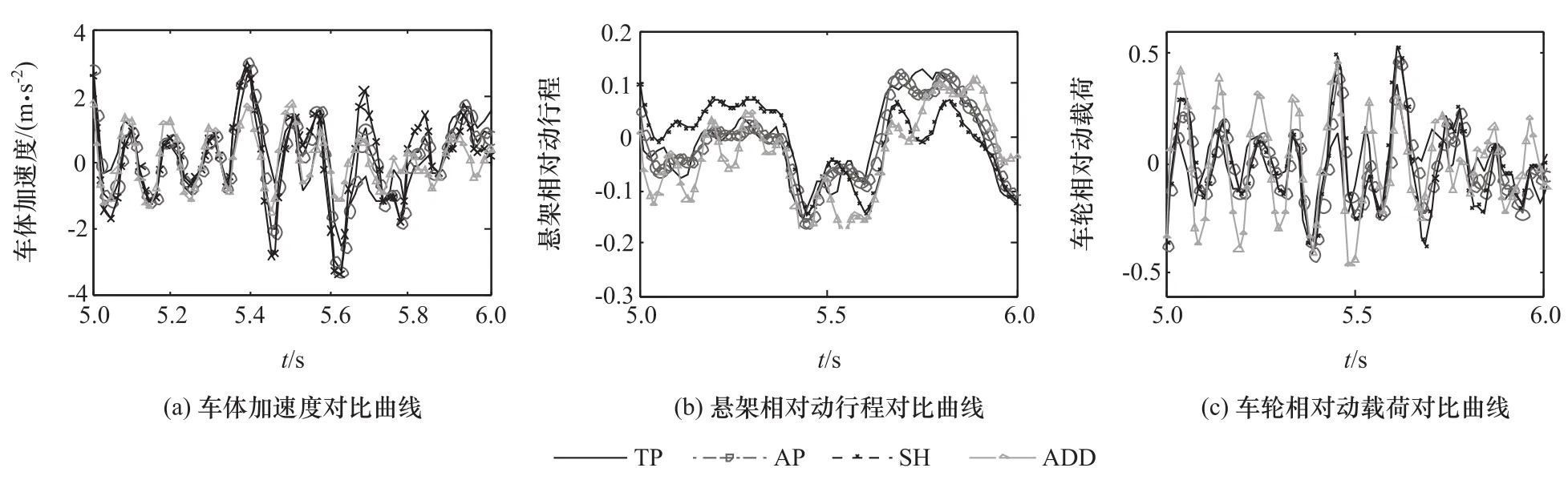
图6 悬架性能时域对比曲线
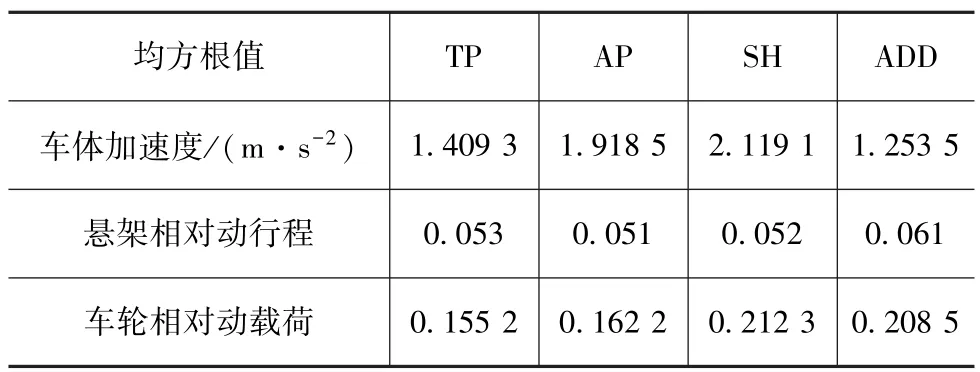
表3 悬架性能指标对比
5 结论
针对车辆主动悬架系统设计了一种齿轮齿条式作动器,通过理论分析与试验研究可得到如下结论。
(1)惯性质量的引入会导致车体和车轮固有频率的降低,有利于提高中低频区域的振动控制效果,但同时也导致了中高频区域振动控制效果的恶化;从整个时域的台架试验结果来看,惯性质量的引入导致了悬架减振性能的恶化。
(2)天棚主动控制只能改善中低频区域的振动抑制效果,但同时会导致高频区的振动进一步恶化;而加速度阻尼控制能减小惯性质量对中高频区域振动的不利影响,相对较好地提高中高频区域的振动抑制效果。因此,作动器含有惯性质量的主动悬架系统应选择中高频控制效果较好的控制算法。
在现有悬架系统结构中,较大的作动器惯性质量会恶化悬架系统的减振性能。因此,在未来作动器的优化设计过程中,可通过对减速机传动比、齿轮分度圆半径和各旋转件的转动惯量的优化匹配,或对悬架系统的结构进行改进设计来尽量减小其惯性质量。
猜你喜欢
氯碱工业(2022年1期)2022-07-02
煤炭与化工(2022年2期)2022-04-14
大型铸锻件(2022年1期)2022-02-12
汽车实用技术(2021年3期)2021-02-24
汽车零部件(2020年1期)2020-03-06
军事文摘(2019年16期)2019-08-26
科技创新与应用(2017年12期)2017-05-08
科技创新导报(2014年36期)2015-03-11
科技创新导报(2014年9期)2014-11-07
科技致富向导(2013年23期)2014-01-09