基于智能轮椅的电磁减震装置设计
2018-10-11 02:37杜妍辰管振兴
生物医学工程学进展 2018年3期
杜妍辰,管振兴
上海理工大学医疗器械与食品学院(上海,200093)
0 引言
随着物联网技术的飞速发展和物质生活水平的不断提高,残疾人士对智能轮椅的渴望越来越高,轮椅不仅是他们的代步工具,而且它的智能性、安全性、舒适性也是非常必要的。在大多情况下,地面的路况往往是复杂的,非常平坦无颠簸的路面相对较少,因此,对轮椅的减震性能和安全性能要求较高。目前,针对智能座椅功能的设计,国内学者已经做了大量的研究。李雪莲[1]提出了轮椅的自主避障导航、安全性等; 夏进军、吴志远等[2-3]从残疾人的心理出发,设计了用户体验高的智能轮椅; 王丽军、王景川等[4]研究了轮椅的最优路径规划。但是,他们都是强调轮椅的智能性与安全性,没有考虑轮椅在不平坦道路行走时的减震性、安全性和舒适性。传统的弹簧减震装置存在寿命短、刚度不可调、灵活度差的缺点,使用时间越长,轮椅的减震效果越差,且对残疾人的脊椎部位有一定的伤害,容易给残障人士的身体和心理造成二次创伤。本文在传统智能轮椅的设计基础上,提出电磁减震技术,设计电磁减震柱应用于轮椅减震,增加轮椅在行驶过程中的平稳性与舒适性。
1 设计原则与需求
(1)残疾人心理需求分析
轮椅的设计主要是为腿脚不便的残障人士和老年人,起初的目的主要是给予他们行动上的方便[5-6],但是在科技迅速发展的今天,身体需要仅仅是一方面,更重要的是残障人士的心理需求。残障人士更渴望像正常人那样行动和生活,周围的人像普通人那样看待他们,轮椅就是替代他们行走的工具,智能性和舒适性是一直以来轮椅设计的初衷。但是轮椅良好的减震性能往往容易被人忽视,残疾人本身已经在身体上受到了伤害,减震效果差的轮椅在长期使用后容易给他们带来颈椎等疾病,会给残障人士造成二次伤害,也更容易造成他们的心理创伤。
(2)轮椅使用时效性
现在智能轮椅的功能包含自动识别导航、语音识别控制、防碰撞等众多功能[7-8],所以它的价格相较而言还是比较昂贵的,因此对轮椅的使用年限和时效性也相对要求较高。在轮椅的实际使用过程中,地面往往大都不是光滑平整的,轮椅在行驶过程中的减震性能也是尤为重要的。但是,传统的智能轮椅在设计的过程中,往往采用的是弹簧减震等减震装置,但是弹簧减震存在寿命短、刚度不可调、灵活度差等缺点,长时间使用后,轮椅的减震性能大大下降,缩短了轮椅的使用寿命,也对残疾人的颈椎造成巨大的伤害。所以,本文设计的电磁减震装置是通过线圈缠绕电磁控制,利用同性相斥的原理减震,不但增加了轮椅的使用年限,而且保证了每次使用时的减震效果,解决了弹簧在长时间使用后减震效果下降的弊端。
(3)自适应调节
传统的智能轮椅在出厂后,它的减震装置都是固定不能调节的,轮椅的高度也是通过手动自行调节。但是不同类型的人有高矮胖瘦之分,普适的减震装置在设计上是有欠缺的,在实际过程中往往不能够带给残疾人最佳舒适感的体验。本文设计的电磁减震装置是通过传感器检测人的身高和体重以及路面的实际路况,自适应调节电磁强弱从而控制轮椅的平稳行驶,进而达到最佳的减震效果。
(4)安全性
智能轮椅在行驶的过程中,是具有一定的速度的,使用轮椅的一般都是腿脚不便的人,速度过快时若地面突然出现人眼未发现的颠簸等状况,人在轮椅上由于惯性作用有前倾跌倒的风险。针对这种情况,在电磁减震装置的基础上,轮椅的椅背处辅以设计环抱减震带,可以根据人的胖瘦自行调节松紧舒适度,既能与电磁减震装置配合减震,又能保证轮椅的安全性。不用的时候环抱带可以自动收缩到椅背后,不占用任何空间,便捷性强。
2 设计方案
(1)设计思路
现代智能轮椅在设计的时候往往大多采用弹簧的减震形式,而弹簧在长久使用后减震效果将会大大下降,而且弹簧刚度不可调适应性差。本文在设计的时候参考了磁悬浮列车的一些原理设计,根据设想若是人能够悬浮在半空中前进,那么不管地面是平坦还是颠簸,对人都是没有影响的。所以由此采用了电磁技术来减震,根据同性相斥的原理,利用传感器,根据人的身高和体重以及地面的实际状况,自适应调节电磁强弱来控制减震,达到最佳的减震目的。
(2)设计结构
轮椅的电磁减震装置主要包括电磁减震柱、椅座、环抱减震装置和控制单元。如图1为智能轮椅主结构图,图2、图3为电磁减震装置的实心柱和空心柱,其中,1为实心柱,2为线圈,3为孔,4为线圈保护套,5为空心柱,6为长轴。电磁减震柱包括上下两部分,上部为实心柱,下部为空心柱,表面分别缠绕线圈,利用同性相斥原理,通电后实心柱可以悬浮在空心柱中央,实心柱中心设置有孔,空心柱内部固定有长轴,孔和长轴契合,便于垂直上下运动。其中,空心柱内直径大于实心柱外直径,实心柱和空心柱的线圈外部设有保护套。当路面不平坦振动时,根据压力传感器传出的信号,通过控制单元自动调节电磁强弱,增大或减小空心柱对实心柱的排斥力度,能够有效地减少因振动对残障人士脊椎的伤害,进而达到最佳的减震效果和舒适度。椅座固定在电磁减震柱的实心柱的上部,其中椅座的椅面中部和椅面的前部设置有压力传感器,监测人的体重和地面颠簸状况。环抱减震装置是设置在椅座的椅背上,能够将人环抱锁住,增加轮椅在行驶过程中的安全性,不用的时候自动收缩到椅背后,便捷美观。
控制单元包括数据处理机,其中数据处理机分别与压力传感器、环抱减震装置以及电磁减震柱相连接。压力传感器检测到地面的颠簸状况,然后将信号传输到控制端元,经控制单元转换后控制电磁减震柱的电磁强弱自动升降达到减震的目的。控制流程图如图4所示。
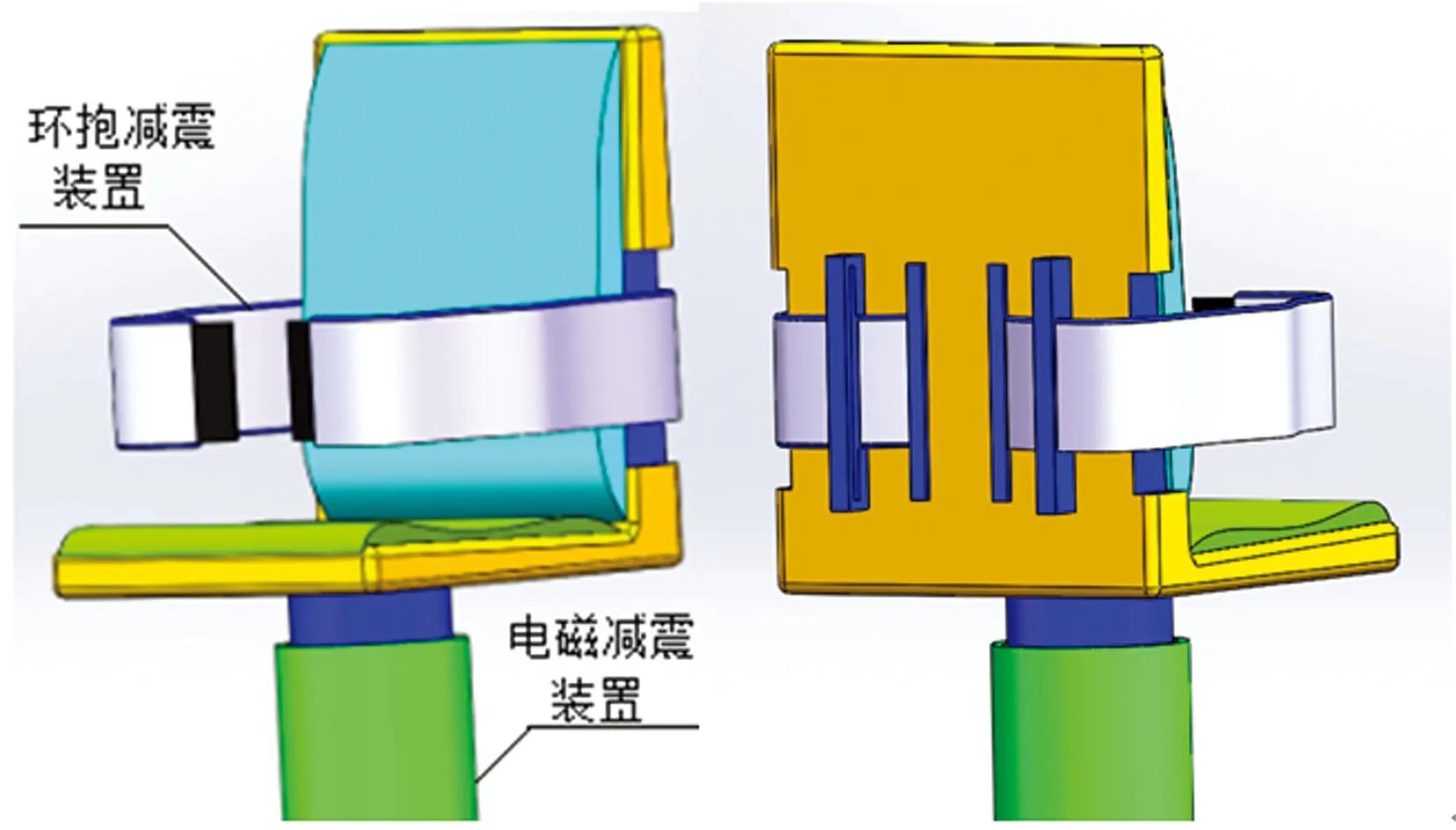
图1 智能轮椅结构图
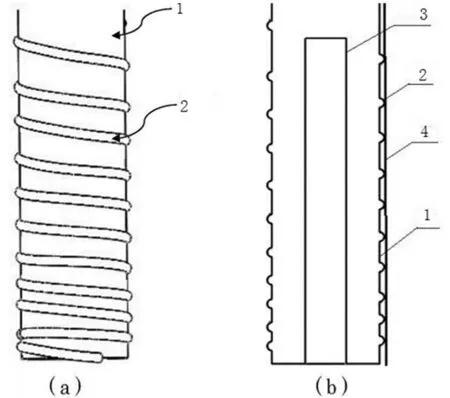
图2 电磁减震装置实心柱局部放大图
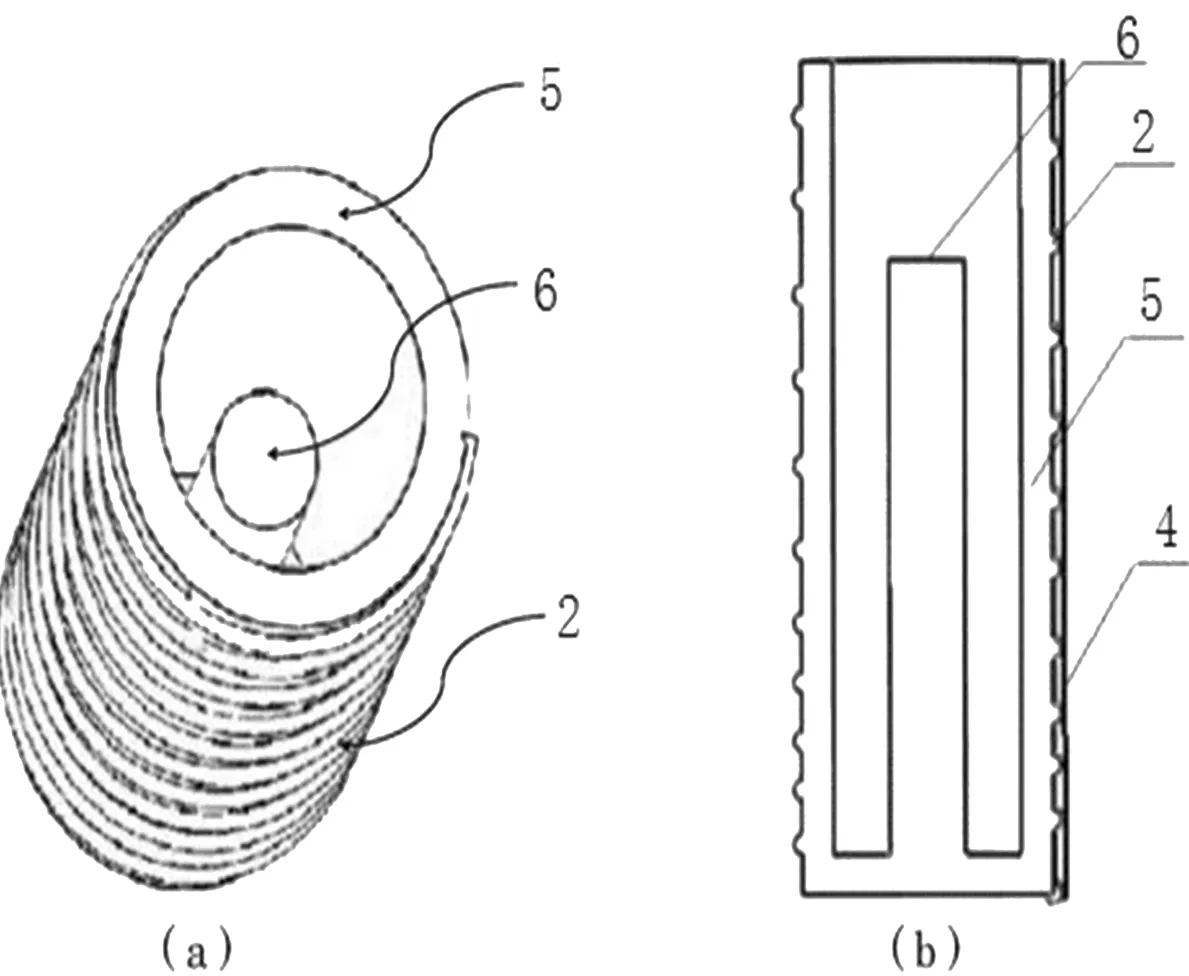
图3 电磁减震装置空心柱局部放大图Fig.3 Partial enlarged view of hollow column of electromagnetic damping device

图4控制流程图
Fig.4Controlflowchart
(3)工作方式
在地面颠簸时,传统智能轮椅的弹簧减震装置是通过弹簧的收缩来减震,但是弹簧随着时间的推移减震效果是不断减弱的,而且刚度不可调、灵活性差,不能适应不同类型的人和实际路况。本文设计的电磁减震轮椅,当人坐在轮椅上,椅面上的压力传感器可以根据检测到的体重,将信号传输给控制单元处理,然后控制单元发出信号调节电磁强弱控制椅面升降将人调整到一个最舒适的角度,适应不同类型腿脚不便的残障人士和老年人。轮椅在地面行驶的过程中,由传感器检测地面的颠簸程度从而带来的压力变化,控制单元控制电磁强弱调整座椅随人的位置变化而自适应升降,因此减震效果最佳人也最舒适。轮椅在行驶中,环抱装置紧扣人的腰部,第一,使人与轮椅达到最佳契合度增强减震的效果; 第二,轮椅具有一定的速度,遇到复杂路况时的突发状况可以提高轮椅的安全性。
3 结论
现代轮椅的发展向着更加智能与舒适的方向不断前进,但是它的价格也是不菲,所以轮椅的使用寿命和是否会对残障人士造成二次伤害是近年来国内外学者一直关心的问题。通过设计电磁式减震轮椅,首先, 符合现代化智能发展的要求,其次, 根据不同类型的人和路况自适应调节电磁强弱控制轮椅达到最佳减震效果,增加了减震系统的灵活性; 再次,通过环抱装置将人紧紧抱住,与电磁减震柱互相辅助提高减震性能,也增加了轮椅整体使用过程中的安全性; 最后,轮椅优秀的减震效果可以减小对残障人士颈椎的危害,从而避免了对他们身体和心理的二次伤害。所以,轮椅的电磁减震装置既符合了智能轮椅发展的模块化需求,也加速了它整体的不断向前发展。
猜你喜欢
小学科学(学生版)(2021年10期)2021-11-05
数学小灵通·3-4年级(2020年3期)2020-06-24
四川文学(2020年10期)2020-02-06
新世纪智能(高一语文)(2019年10期)2020-01-13
橡塑技术与装备(2018年17期)2018-09-01
江西建材(2018年4期)2018-04-10
天津诗人(2017年2期)2017-11-29
作文通讯·高中版(2017年12期)2017-02-06
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
橡胶工业(2015年8期)2015-07-29