
基于Pumplinx的齿轮泵内部流场仿真
2018-10-10 03:09:48文昌明张宸赫李玉龙
成都大学学报(自然科学版) 2018年3期
文昌明, 张宸赫, 李玉龙
(成都大学 机械工程学院, 四川 成都 610106)
0 引 言
外啮合齿轮泵(简称齿轮泵)是一种泵送油液的动力工具,因其价格、可靠性、寿命和自吸能力等方面的优势,在常规油类介质应用中相当广泛[1].但其结构易导致出现困油现象、径向力不平衡、进口空化、出口压力脉动等问题[2-6].在流体仿真软件出现以前,设计人员主要通过实验和理论分析的方法对齿轮泵的整体性能进行分析,而对其内部流场的细节常忽略不计.随着通用三维流体仿真软件的出现,设计人员实现了对齿轮泵内部流场的仿真分析[7-9].其中,Pumplinx是一款泵类CFD软件,其主要针对齿轮泵的内部流场的仿真计算.目前,Pumplinx在齿轮泵中的应用,更多强调的是仿真结果的分析,而对其仿真流程的描述则过于简单[10-12].为此,本研究拟通过实例的详细描述,为齿轮泵的仿真过程提供参考案例.
1 齿轮副模型
1.1 主流域的齿轮副模型
实例齿轮泵的参数为:模数3 mm,齿数10,压力角20 °,齿顶高系数1.125,顶隙系数0.25,变位系数0.139,齿宽20 mm;齿侧间隙0.05 mm,啮合处的油膜厚度0.03 mm;齿顶径向间隙0.1 mm;轴向间隙0.06 mm.经计算,节圆直径为30.866 mm,顶圆直径37.647 mm,啮合角24.03 °.
主流域齿轮副建模过程为:
首先,在UGNX 12软件中,借助齿轮建模——GC工具箱模块中的柱齿轮工具创建渐开线圆柱直齿轮,输入齿轮参数,得出的齿形(见图1).

图1主流域的齿轮副模型
在图1中,若点击节圆直径和顶圆直径左侧的参数估计按钮,会弹出对话框,输入牙(齿)数和变位系数,程序内部会自动估算出节圆直径和顶圆直径;不过,估算出的值是按照无侧隙计算得出的,会造成齿轮副的齿形误差.为避免软件内部的无侧隙与泵用有侧隙齿轮副间的计算误差,在节圆直径和顶圆直径后的对话框内,直接输入实际的计算结果即可.
其次,在装配文件中,将同齿形参数的主、从齿轮按有侧隙计算所得的中心距装配,并在两齿的啮合线上垂直装配进油膜厚度为0.03 mm的实体(见图2).同时,通过约束使两齿面与该实体几何接触.
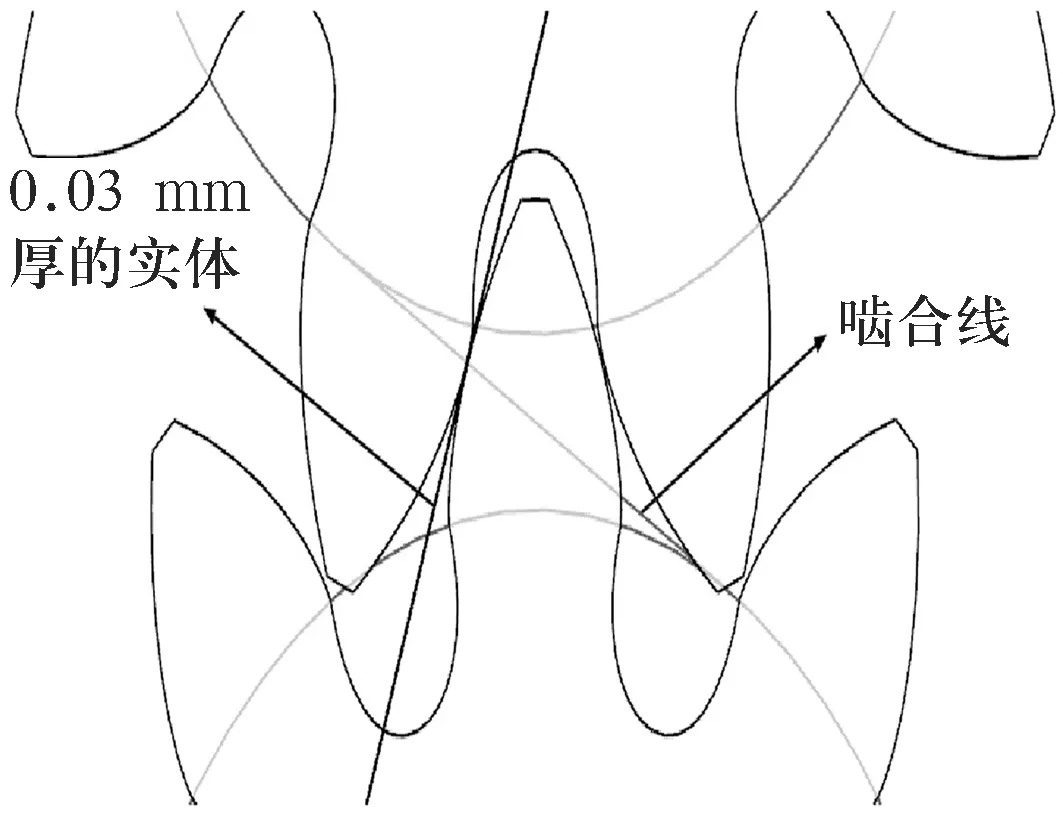
图2固定侧隙值的齿轮副装配方法
依据图2所示装配方法的齿轮副,具有了预设的啮合侧隙、啮合油膜厚度以及标准顶隙值(见图3).其中,o1为主动齿轮,o2为从动齿轮.

图3有侧隙齿轮副精确模型
1.2 辅流域的补建模型
为了构建仿真所需的整体流域,除上述主流域的齿轮副模型外,还需再补建出进、出口流域以及包裹齿轮副的8字形齿顶径向间隙处的环流域以及卸荷槽内的流域.同时,基于Pumplinx对齿轮泵做结构化动网格划分时,可选取高级网格模式直接创建出对称的轴向间隙,故在几何模型中可不必创建轴向间隙.
取进油口直径18 mm,出油口直径17 mm,卸荷槽选取圆形卸荷槽,卸荷槽深度5 mm,补建出的三维模型如图4(a)所示.其中的2个齿轮、8字形环、进口、出口及4个耳形卸荷槽间,不得存在几何上干涉.

图4 仿真所需必要几何模型及导出对话框
然后,将以上的主、辅流域模型,通过UGNX 12的导出功能,按照图4(b)所示的对话框,导出Pumplinx能识别的*.stl格式文件.
2 仿真运算前处理
模型仿真运算前处理流程的步骤为:打开Pumplinx软件,新建一个项目(见图5).在图5(a)所示的Mesh面板区域上,点击Import/Export Geometry or Grid;然后,在图5(b)所示的属性区Properties上,按照Display Geometry/Mesh Properties→Operation的值为Import Surface→Surface Format→STL Triangulation File→Import Surface from STL Triangulation File.对应于导出后的stl文件,其几何实体如图5(c)所示.

图5 STL文件的导入
Pumplinx软件默认的长度单位为m,而在UGNX 12软件的默认单位为mm,因而对导入后的几何实体需比例缩放,其流程为:图5(d)对应Geometric Entities→所有CAD Surfaces面→在图5(a)的Mesh面板中→Transform Geometry or Grid→图6所示的比例缩放的属性面板→按照图示选取对应的值→Scale按钮.

图6比例缩放和几何实体的分割与合并
网格划分前,还需对缩放后的几何实体做一定的分割与合并,其流程为:选中所有的几何实体→在图5(a)的Mesh面板区→Split/Combine Geometry or Grid→图6(b)所示的分割与合并的属性区→选中需要分割或合并的几何实体→图6(c)中选中对应的Operation值→图6(b)上对应的按钮→对分割与合并后的几何体分别进行命名,以便在网格划分后能够快速地找到相应的交互面(见图7).
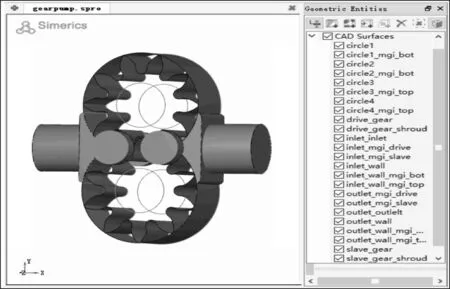
图7重命名分割与合并好的几何体
图7中,circle1~4为4个圆形卸荷槽壁面;circle1~4-mgi-top、bot为4个卸荷槽与齿轮副上下端面的交互面,亦或与轴向端面泄漏面的交互面;drive、slave-gear为主、从齿轮;drive、slave-gear-shroud为主、从齿轮的外侧壁面,即分割开的8字形壁面;inlet、outlet-mgi-drive,inlet、outlet-mgi-slave为进、出油口与主、从齿轮外侧壁面的交互面;inlet、outlet-wall代表进、出油腔的壁面;inlet、outlet-wall-mgi-bot,inlet、outlet-wall-mgi-top为进、出油腔的壁面与卸荷区的交互面.
3 网格划分与交互面
3.1 网格划分
对于齿轮泵,其网格分为进油区、转子区、卸荷区、出油区4部分.其中,转子区域,可通过模块化的操作步骤快捷的生成高质量动网格,其流程为:点击图5(a)中的Rotor Template Mesher按钮→在属性面板中→选择或输入图8(a)所示的参数;Pumplinx对外齿轮在生成结构化动网格的同时,可直接生成对称的轴向间隙, 只需在Setup Options选择Advanced
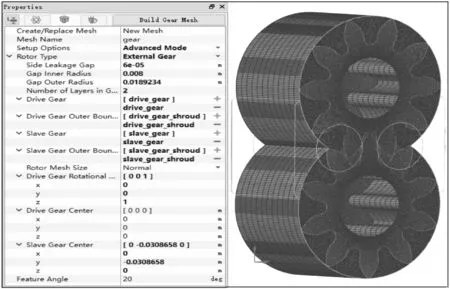
图8转子区及轴向间隙区的网格划分
Mode高级模式,并输入轴向间隙的相关参数;最后点击Build Gear Mesh按钮,选中生成的几何体,并在Result面板区将Grid开关按钮勾选,即可出现如图8(b)所示的网格转子以及轴向间隙的网格.
对进油区、卸荷区、出油区的网格划分,以进油区为例说明如下,其流程为:点击图5(a)中的General Mesher,按住Ctrl键,选中如图7中的inlet-inlet、inlet-wall、inlet-mgi-drive、inlet-mgi-slave、inlet-wall-mgi-bot、inlet-wall-mgi-top这6个片体所围成的进油腔,在如图9(a)所示的属性面板区,输入需要的网格参数,点击Create Mesh按钮,即可生成图9(b)所示的进油区网格.

图9进油区网格划分
按上述方法接着生成卸荷区以及出油区的网格,则最后总的网格划分如图10所示.

图10齿轮泵网格(不包含轴向泄漏网格)
3.2 交互面创建
网格创建后,接着创建网格区域的交互面:点击Geometric Entities面板下的第一个切换按钮Group Entities by Volumes/Types,切换为Boundaries显示模式.为便于详细阐述交互面的创建,先删除在高级模式创建转子区动网格时自动创建的Mismatched Grid Interfaces和Interfaces.首先创建转子区与进出油区的交互.这里先创建齿轮转子网格上侧的半8字行片体与进出油腔上侧的片体交互(见图11),选中drive-gear-outside,inlet-mgi-drive,outlet-mgi-drive这3个边界片体,点击箭头所指的Connect Selected Boundaries via MGI按钮,即可创建这3个片体间的交互面.

图11交互面创建(1)
按照图11所示的方法,依次创建其余的交互面,具体包括:图12(a)齿轮转子网格下侧的半8字行片体与进出油腔下侧的片体交互;图12(b)、12(c)分别创建齿轮上、下端面与端面间隙的交互面;图12(d)、12(e)分别创建上、下卸荷槽与端面间隙,以及进出口壁面的交互面.

图12交互面的创建2
最后,创建好的交互面如图13所示.

图13交互面创建(2)
4 模块选取及参数设置
Pumplinx拥有业界独一无二的空化(汽蚀)模型,其具体设置为:在Model面板,点击Select Modules按钮,从列表中选取Cavitation模块添加进来,Model面板如图14所示.其中,gear模块在动网格生成时会自动添加进入,点击gear模块,在Properties属性面板输入图中所示参数.
图14中,在时间定义项Time Definition中Number

图14模块与旋转参数设置
of Revolutions表示仿真的圈数,Time Steps Per Drive Gear Tooth Rotation表示仿真每转动一个齿的迭代步数,在配置参数区Pump Configuration是主、从齿轮的齿数及中心坐标,在角速度定义区Angular Velocity Definition中,选择旋转方向以及转速的具体定义.
点击几何实体,基于选定的空化模型,进行边界条件的设定,具体为:点击Geometric Entities面板下的第一个切换按钮Group Entities by Volumes/Types,切换为Boundaries显示模式,点击进口面inlet-inlet,在属性面板区的Model选项卡下会出现如图15(a)所示的选项,选择进口Inlet和输入进口压力,同理,点击出口面如图15(b)一样输入所需的参数.
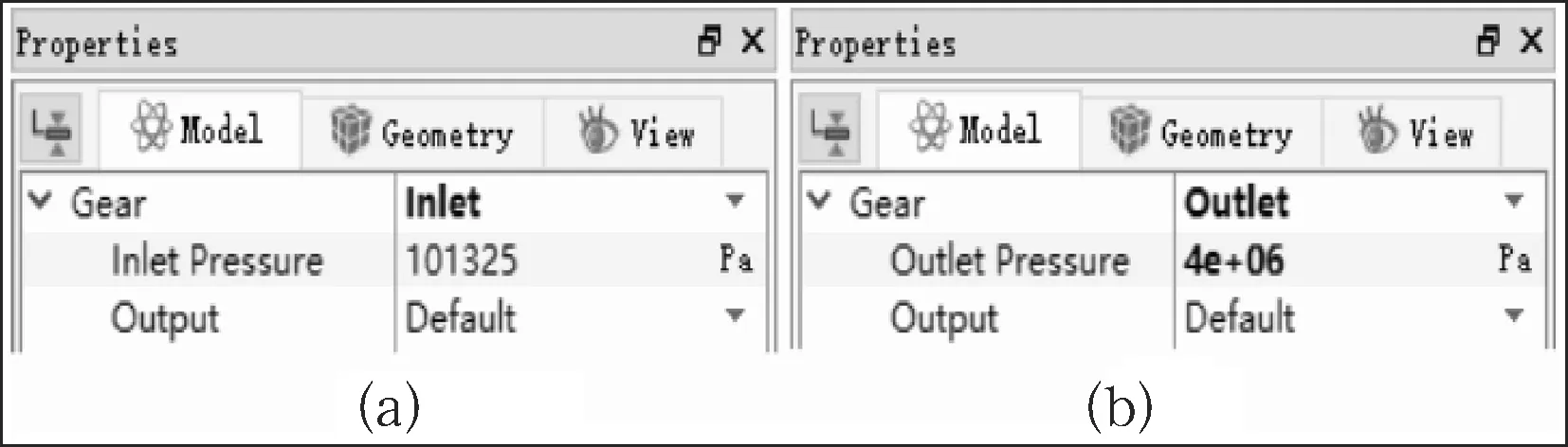
图15进、出口边界条件设置
在创建齿轮转子区动网格时以及转动参数设置时,驱动齿轮和从动齿轮的边界条件会自动添加,结果如图16所示,分别为drive-gear和slave-gear的边界条件,其余的边界面默认为壁面,可根据需要自行更改.

图16主、从动齿轮边界条件设置
边界条件设置好后,接着设置介质参数,在图17中,选定体Volumes,在属性面板中,设置介质的相关参数.

图17介质参数设置
5 仿真运行及后处理
通常,为得到流体域中某一具体点的特征值以及特征曲线,需要建立监测点.本仿真以困油区内的困油压力为例,在图18中,点击几何实体面板下的Create a Monitoring Point按钮,并在属性面板中的Geometry选项卡下,将类型Type选取为Prescribe Motion,因为随着齿轮的旋转,监测点的位置会被齿轮轮廓周期性的遮挡,把监测点设置为动态的,即在增加该点的设置入该点所处的位置,就会实时地显示出该点压力曲线.

图18创建监测点
接着,在Simulation仿真面板上,做仿真前的最后准备.在图19中,选择所需的时间定义类型,可根据需要修改仿真的总旋转圈数,Number of Iterations为每计算一步的最大的迭代次数,Simulation Time(Duration)和Number of Time Steps分别代表旋转给定圈数的总时间以及总的仿真步数,Result Saving Frequency表示结果的保存频率,每运行10次就保存1次,保存的结果可以用来导出仿真动画.其数值越小保存的结果文件就越多,导出的动画连续性就越好,同时,导出的结果文件可以通过Load Result按钮加载,显示保存时的仿真状态.最后点击Start按钮,开始进行仿真运算.

图19仿真参数设置
图20中,选中所有的Volumes,在Result面板中将变量Variable选定为presure,并在Min和Max处设置好压力的显示区间.

图20压力云图
点击功能区的Add XY-Plot按钮,添加曲线,这里添加2条曲线作为演示,选中Plot1,点击曲线图左侧的Click for Variable List按钮展开变量列表,点击处于流体域中的点Point10,这时在变量列表中就会出现存在的空化以及流动性的一些指标,选中Presure,点击上方的Plot Selected Variable图标,就可以显示出该点的压力曲线.
选中Plot2,点击Geometric Entities面板下的切换按钮Group Entities by Volumes/ Types,切换为Boundaries显示模式,同时选中inlet-inlet,outlet-outlet进出口面,在出现的变量列表中选中Mass Flux或者Volumetric Flux并点击Plot Selected Variable,就会同时出现这2个面的质量流或体积流,点击Combine Entity Data into a single Curve图标,对进出口面的质量流或体积流求和.
仿真完成后,残差曲线、压力曲线以及进出口质量流的曲线如图21所示.其中,图21(a)为总步数的残差曲线图,点击右下角的切换按钮可以显示单步的残差图,可见所有的曲线都在-1以下,表明每一步计算都是收敛的,计算结果可靠.图21(b)为所创建的12个监测点所监测出的一个困油循环的实时压力曲线.图21(c)为进出口质量流以及两者之和.

图21 残差、压力、质量流曲线
6 结 语
本研究借助UGNX和Pumplinx软件,阐述了齿轮泵从建模到仿真的完整流程及细节重点,为Pumplinx软件运用于齿轮泵内部的学习、模仿和实践提供了详细的步骤,为后续容积泵开发及空化性能分析等提供了可借鉴的思路.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:30
中国石化(2022年5期)2022-06-10 06:39:18
减速顶与调速技术(2018年1期)2018-11-13 01:09:18
消费导刊(2018年8期)2018-05-25 13:20:20
橡胶工业(2015年1期)2015-07-29 08:33:58
法制博览(2015年30期)2015-02-06 20:25:56
中国塑料(2014年2期)2014-10-17 02:51:06
河南科技(2014年16期)2014-02-27 14:13:22
华北水利水电大学学报(自然科学版)(2014年2期)2014-02-27 13:29:42
金属矿山(2013年7期)2013-03-11 16:54:11
