
Identification of Driving Intention Based on EEG Signals
2018-10-10 06:27MinLiWuhongWangXiaobeiJiangTingtingGaoandQianCheng
Min Li, Wuhong Wang, Xiaobei Jiang Tingting Gao and Qian Cheng
(1.School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081, China;2.School of Automobile & Transportation, Qingdao University of Technology, Qingdao 266520, Shandong, China)
Abstract: The driver’s intention is recognized by electroencephalogram(EEG) signals under different driving conditions to provide theoretical and practical support for the applications of automated driving. An EEG signal acquisition system is established by designing a driving simulation experiment, in which data of the driver’s EEG signals before turning left, turning right, and going straight, are collected in a specified time window. The collected EEG signals are analyzed and processed by wavelet packet transform to extract characteristic parameters. A driving intention recognition model, based on neural network, is established, and particle swarm optimization (PSO) is adopted to optimize the model parameters. The extracted characteristic parameters are inputted into the recognition model to identify driving intention before turning left, turning right, and going straight. Matlab is used to simulate and verify the established model to obtain the results of the model.The maximum recognition rate of driving intention is 92.9%. Results show that the driver’s EEG signal can be used to analyze the law of EEG signals. Furthermore, the PSO-based neural network model can be adapted to recognize driving intention.
Key words: wavelet packet; electroencephalogram(EEG) signal; driving intention; neural network model
This research explores electroencephalogram (EEG) signals in different zones of the brain by combining theoretical analysis and experiments. In particular, the development of automatic driving has led to in-depth research on driving intention. Foreign research on driving began in the mid-1930s. General motors developed an identification method based on characteristic parameters to identify driving intention by using the change rate of the acceleration pedal, which is used to assist shift control[1]. Tarek Taha et al. identified an operator’s intention by using a partially observable Markov decision process, which was applied to a novel assistant wheelchair driving system[2]. Takuya Mizushima et al. used a hidden Markov model combined with probability and statistics theory to model the deflection angle of a vehicle’s steering wheel. Existing studies also focused on the development of a driver intention estimation model using Bayesian method[3]. In 2013, Liebner Martin et al.[4]assessed driving intention at urban intersections by estimating vehicular speed and inferred driver intention through the parametric model of vehicles’ following and steering behaviors. Rodemerk C et al.[5]proposed a prediction system for drivers’ steering at intersections. They used vehicle, driver, and road parameters as input parameters to obtain the prediction result.
Meanwhile, local research on driver intention and driving assistance system is still in its infancy. This is partly because the development of a mathematical model for the identification of a driver’s intention is challenging. Vehicle driving state and driver’s operation are used as the bases for evaluation by combining these factors with the driving experience.
The selection and extraction of the characteristic parameters of driving intention are crucial in this field of research. Traditionally, steering wheel angle, pedal distance, throttle acceleration, and other parameters are used as characteristic parameters to identify driving intention. In the current study, wavelet packet technology is used to perform the decomposition and characteristic extraction of EEG signals acquired in the driving process. Then, the characteristics of the extracted EEG signals are input into the recognition model as parameters to identify driving intention. The current study not only provides theoretical support for future research on automatic driving but also provides a reference for assisted vehicle driving.
1 Experimental Analysis
The experimental equipment consists of two parts: a virtual unit for driving and an EEG signal acquisition device. The virtual unit for driving is used to help the driver turn left, turn right, go straight, and perform other operations. The acquisition device is used to acquire the EEG signals of the driver when turning left, turning right, going straight, and performing other operations.
The purpose of the experiment was to test the driver’s EEG signals when turning left, turning right, going straight, and performing other conditions in a typical urban environment. The EEG device, g.USBamp, was used to test the driver’s EEG signals, and to save and analyze this data in order to extract EEG characteristics. These characteristic values were inputted into the neural network identification model, based on particle swarm optimization (PSO) algorithm, to identify the driver’s intentions of turning left, turning right, or going straight. The results of this experiment can provide theoretical support for the automatic driving of vehicles.
Ten test subjects(9 males, 1 female, since hair density would affect the intensity of EEG signal) participated in the experiment. The subjects, aged 26 to 36,were in good physical condition and consisted of doctoral and postgraduate students at Auckland University , and were holders of driver license C with 1-10 years of driving experience.
The experimental process and method were as follows: the EEG device, g.USBamp, was used to test the driver’s EEG signals. Using a virtual simulator and typical sections of an urban road, 10 drivers performed normal driving operations in virtual and simulated road conditions by means of hardware devices, such as a steering wheel, transmission lever, accelerator pedal, and brake pedal. In this experiment, 16 electrodes on top of the driver’s head were tested. The virtual driving unit and EEG signal acquisition device are shown in Fig.1.
A total of 16 channels on top of the driver’s head were tested to acquire EEG signals. These 16 channels were F3, FC3, C3, F1, FC1, C1, Fz, FCz, Cz, F2, FC2, C2, F4, FC4, C4, and CPz.
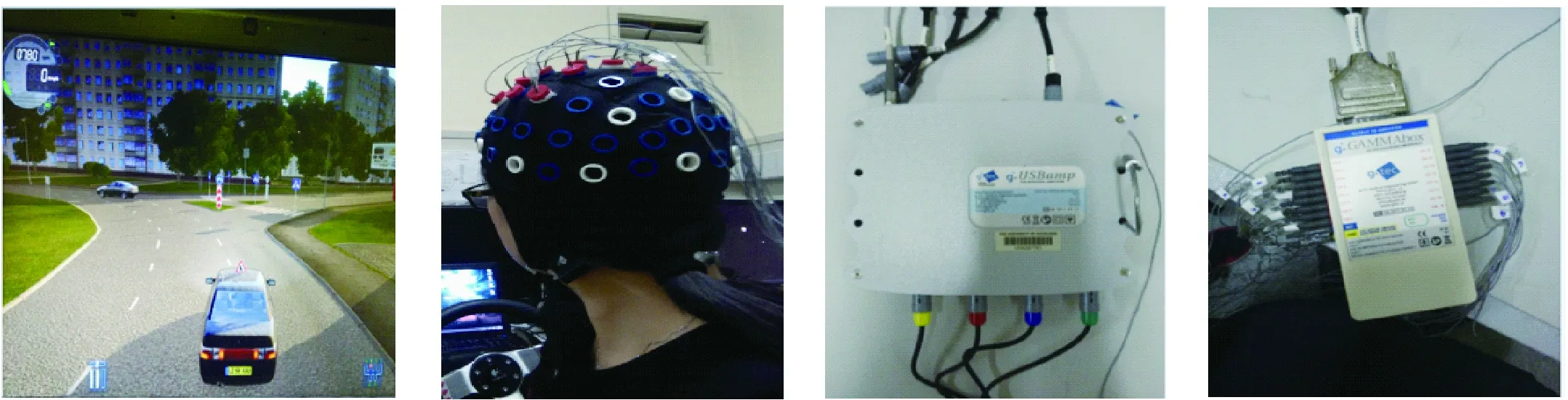
Fig.1 Virtual driving unit and EEG signal acquisition device
2 Wavelet Packet Analysis
Wavelet packet has a strong ability to analyze signals, and it can improve the frequency localization of the high-frequency part of signals.The decomposition formula of the wavelet packet is given below as
(1)
(2)
Eq.(1) shows that the signal has 2jwavelet packets on layerj, and the 2iwavelet packet is the result of interval sampling afteriwavelet packet decomposition filter H convolution on layerj-1. Eq.(2) shows that the 2i+1 wavelet packet is the result of sampling afteriwavelet packet decomposition filter G convolution on layerj-1.
The wavelet base functions with high classification efficiency were chosen from several wavelet bases used for classification. The graph of db1 is similar to an EEG pattern. Therefore, the db1 function was used in this study as a wavelet base function.
The node graph for wavelet packet decomposition in this study is given in Fig.2.

Fig.2 Wavelet packet decomposition
θwave: 4-8 Hz, corresponds to Node 32.αwave: 8-13 Hz, corresponds to Nodes 33 and 139.βwave: 13-30 Hz, corresponds to Nodes 140, 70, 37, and 77.γwave: 30-60 Hz, corresponds to Nodes 78, 9, 21, and 45. According to the frequency range of the three waves, the nodes must be decomposed into seven layers. In other unnecessary frequency ranges, the decomposition of nodes does not need to be shown on the graph.
With wavelet packet decomposition, based on the energy characteristics ofθ,α,β, andγwaves in EEG signals, the driver can evidently extract the energy of waves in these four frequencies in the driving process. The energy ratio of each waveform was used as the parameter to be inputted into the recognition model to identify driving intention.
3 Particle Swarm Optimization (PSO)-Based Neural Network
3.1 Particle swarm optimization
The basic idea of PSO is that a group of random particles follows the current optimal particle to search the solution space to find the optimal solution by iteration. The particle updates its position and velocity according to two optimal solutions.The first is the optimal solution of the particle itself, and the other is the optimal solution of the population.
When the particle renews itself, the PSO model is used as
(3)
whereωrefers to inertia weight,d=1,2,…,D;i=1,2,…,n,krefers to the current iterations;Vidrefers to the velocity of the particle,c1andc2are acceleration factors, andr1andr2refer to random numbers.
3.2 Neural network
Back propagation (BP) neural network was used in this study for recognition. This model is designed according to the problem-solving principle of the brain and is a multi-layer network that generalizes the W-H learning rule and realizes the weight training of nonlinear differentiable functions. It is a kind of gradient descent search method. The BP neural network is a multi-layer network with three or more layers, each having several neurons. Its left and right neurons are fully connected, whereas the upper and lower neurons are not connected, as shown in Fig.3.

Fig.3 Structure of the BP neural network
The S function is used as the activation function since it is continuously differentiable and closer to the signal output form of biological neurons than other functions. The S function can be expressed as
(4)
3.3 PSO-based neural network
The weight and thresholds of the input and output layers of the neural network were determined randomly. The weights and thresholds of the input and output layers significantly influence the classification or prediction of the neural network[6-9]. These four parameters cannot be determined as optimal parameters through random determination.Thus, to determine the optimal weights and thresholds of the input and output layer,the accuracy of neural network training was used as the fitness value. To obtain a good accuracy rate, PSO[10-11]was used to determine the optimal weights and thresholds of the input and output layers. Using the weights and thresholds of the input and output layers as particles and the accuracy rate of the neural network as the fitness value, the principle and formula of PSO were continuously updated to determine the optimal weights and thresholds. The neural network model with optimal weights and thresholds was used to identify driving intention.
The brain’s functional area is divided into three zones to ensure that the study is based on 16 electrodes of the driver. The channel with the highest recognition rate obtained in each zone was then used as the indicator, as shown in Fig.4.(taking channel F1on the left as an example).

Fig.4 Confusion graph for recognition of turning-left and going-straight intentions
Driving intention is identified through the PSO-based neural network. As shown in Figs.4-5, the recognition rate of the going straight and turning left intentions is the highest at 92.9%. Training recognition rate is 85.1%, and total recognition rate is 84.2%. The recognition rates of driving intention in all three zones are shown in Tab.1.

Fig.5 ROC graph for recognition of turning-left and going-straight intentions
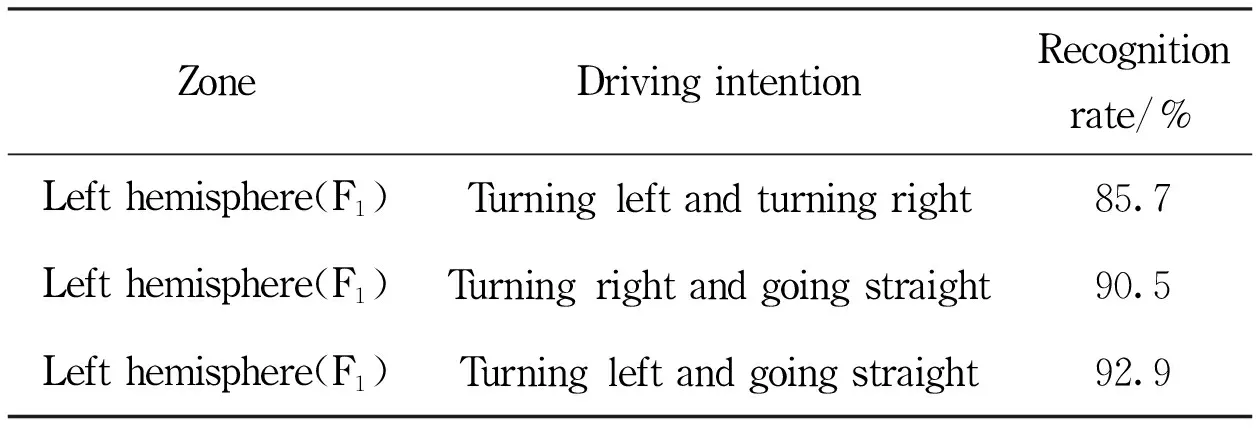
Tab.1 Recognition rates of driving intention
The maximum recognition rate of driving intention obtained through the PSO-based neural network is 92.9%.
4 Conclusions
In this study, the characteristic extraction of the waveform of EEG signals to be used as input parameters are carried out through wavelet packet decomposition and reconstruction. The upper part of the driver’s brain is divided into three zones (left hemisphere, right hemisphere, and central area). The ratios of energies to the energy of a channel in the three zones are used as input parameters, which are input into the PSO-based neural network for identification. The results are obtained as follows.
① In the left hemisphere (F1), the recognition rate of turning left and turning right is 85.7%, the recognition rate of turning right and going straight is 90.5%, and the recognition rate of turning left and going straight is 92.9%.
② In the right hemisphere (FC2), the recognition rate of turning left and turning right is 85.7%, the recognition rate of turning right and going straight is 90.5%, and the recognition rate of turning left and going straight is 92.9%.
③ In the central area of the brain (Cz), the recognition rate of turning left and turning right is 85.7%, the recognition rate of turning right and going straight is 85.7%, and the recognition rate of turning left and going straight is 92.9%.
The results lead to the conclusion that the built model of neural network based on PSO can be used to recognize driving intentions through EEG signals under different driving conditions, with high recognition accuracy, providing theoretical and practical support for the applications of automated driving.
 Journal of Beijing Institute of Technology2018年3期
Journal of Beijing Institute of Technology2018年3期
- Journal of Beijing Institute of Technology的其它文章
- Simplified Method for Joint Calibration of 3D Ladar and Monocular Camera
- Force Control of Electro-Hydraulic Servo System Based on Load Velocity Compensation
- Name Relevance and Contact Opportunity-Based Routing Strategy for Mobile Content Sharing
- High-Speed Noise-Based Random Bit Generator by Removing 1/f Noise with Differential Comparison
- Radiometric Calibration Chain Design Based on Uniform Collimated Laser Source
- Numerical Investigation on the Features of Gasoline Mixture Flow Field with Rotary Jet Mixing