
基于风险预测的飞行安全操纵空间构建方法
2018-10-10 07:03李哲徐浩军薛源裴彬彬
北京航空航天大学学报 2018年9期
李哲, 徐浩军, 薛源, 裴彬彬
(空军工程大学航空工程学院, 西安 710038)
飞机失控是导致飞行事故的主要原因[1],驾驶员的正确操纵是防止飞机失控的前提条件,提高驾驶员的情景感知能力(situational awareness)可为驾驶员的正确操纵提供判断依据。空客公司的研究报告指出,约85%的飞行事故或事故征候中至少一次涉及到驾驶员情景感知能力的丧失[2]。驾驶员的情景感知能力是指驾驶员对当前和今后一段时间内的飞行状态和周围环境的认知程度。有效的情景感知能力使得驾驶员能够提前预测飞机的飞行状态并采取合适的操纵策略,这对于飞行安全至关重要。现有的情景感知手段一般为实时观察部分飞行安全关键参数是否超出许用值来预测飞行风险[3]。当飞机遭遇故障(如升降舵卡阻、单发失效)或复杂气象条件(如结冰、风切边、尾流)时,飞行安全关键参数许用范围和操纵范围可能缩小。飞行员在不清楚操纵边界缩小程度的情况下操纵飞机可能导致较为严重的后果,如1994年ATR飞机结冰失事[4],飞机在5°迎角时即发生滚转,远低于许用值18.1°。对特殊情况下的驾驶员情景感知能力的研究成为了当今飞行安全领域的热点问题之一。
针对驾驶员情景感知能力的研究主要集中在飞行安全信息的显示和告警方面。Tan和Guy设计了商用飞机机载情景感知信息系统的迭代策略,提出了正常、非正常和紧急情况下的安全信息三级分类显示方法,使飞行员更容易在正确的时机获得适当的操作内容[5]。Carlos和Serafin从驾驶员操纵、信息获取、环境影响等方面设计了驾驶员情景感知能力评价系统[6]。Trujillo和Gregory研究发现在飞机发生故障前后,驾驶员更倾向于重点关注能量参数,尤其是滚转角、高度变化率和空速,为优化飞行参数显示器提供参考[7]。Gingras等研究开发了积冰污染边界保护系统(Icing Contamination Envelope Protection,ICEPro),通过直观的显示结冰位置和飞机状态等信息提高驾驶员的情景感知能力,经地面模拟器试飞效果良好[8]。Wei和肖旭等通过人机闭环系统仿真分析了驾驶员情景感知能力评价标准,进而评价了3种典型机型的驾驶舱人机交互系统[9-10]。王小龙等提出一种飞机结冰后的飞控系统边界保护方法,引入铰链力矩检测模块,提前告警飞机纵向失速,为驾驶员和飞控系统提供安全保护裕度[11]。薛源等根据多元极值理论构建了尾流风险概率三维拓扑结构图,为驾驶员直观显示场域尾流风险等安全信息[12-13]。Kasey等设计了动态飞行包线保护系统,并直观地提供给驾驶员,以提高驾驶员的情景感知能力[14]。
上述研究中,故障情况下和复杂环境情况下的安全告警系统或边界保护系统等,多是为驾驶员提供实时的飞行状态参量和边界信息,如迎角、侧滑角、舵面位置、爬升率及其限制边界等。飞行故障或复杂气象条件等特殊情况均会导致飞行安全边界的畸变,飞行安全参数许用范围的缩减,且不同情况下的飞行安全关键参数也不尽相同。驾驶员在不利外界环境影响下判定当前飞行状态,同时关注诸多飞行参数可能加重飞行员的操纵负荷,甚至引发误操纵危及飞行安全[15]。此外,飞行控制系统提供给驾驶员的信息均是带有少量延迟的当前飞行状态,不具有预测性[16]。笔者认为,相较于评判当前飞行状态是否安全,预测未来一定时间内飞行安全关键参数变化趋势和潜在的飞行风险更重要。
通常驾驶员通过油门、驾驶杆(盘)和脚蹬操纵飞机,依据当前和未来一定时间内的飞行状态,分析飞行安全参数变化趋势,计算潜在操纵动作的飞行风险,将不同操纵策略下的飞行风险,以直观的拓扑云图的方式呈现给驾驶员,将极大地减轻驾驶员的操纵负荷,有利于驾驶员在安全操纵范围内选择正确的路径和策略,避免紧张环境下误操纵导致某些参数超限。针对此问题,本文提出基于人机闭环系统仿真的复杂条件下飞行安全操纵空间的概念,将驾驶员操纵指令下的飞机飞行安全参数轨迹色彩化,划分不同风险等级,并综合计算得出相应操纵指令的风险概率,据此拓扑至所有可能的操纵策略,揭示复杂环境下的安全操纵边界和事故致灾机理,为驾驶员提供直观的安全操纵建议和告警提示。
1 模型构建
飞机故障或复杂气象环境等特殊条件下,飞行操纵往往涉及到临界飞行状态,具有强耦合、强非线性等特点,需要构建六自由度全量非线性运动方程和环境因素模型,为人-机-环闭环系统仿真奠定基础。
飞机本体非线性动力学模型可表示为[17]
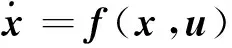
(1)
式中:x为状态向量,包含飞行速度V、迎角α、侧滑角β、四元数q0~q3、俯仰角速率p、滚转角速率q、偏航角速率r和空间位置参数xg、yg、zg。
x=[V,α,β,q0,q1,q2,q3,p,q,r,xg,yg,zg]T
(2)
u为控制向量,包括油门偏度指令δth、升降舵偏度指令δe、副翼偏度指令δa和方向舵偏度指令δr。
u=[δth,δe,δa,δr]T
(3)
为避免计算过程中产生奇点,采用四元数法构建飞机动力学模型:
(4)
(5)
(6)
同时

(7)

外部环境如紊流、尾流、风切边、结冰等对飞行安全影响较大,不当操纵易引起飞行安全关键参数超限,导致飞行事故[19]。本文选取机翼结冰来说明外部环境对飞行安全操纵空间的影响。国内外对结冰气象条件下的飞机飞行动力学特性研究较多。根据Bragg等[20]提出的结冰影响模型,构建结冰条件下的气动力模型,结冰前后气动参数为
C(A)iced=(1+ηkC(A))C(A)
(8)
式中:C(A)为某一气动导数;C(A)iced为结冰后该气动导数值;η为气象因子,用于表征飞机结冰严重程度,CCAR-25-R4附录C中规定结冰气象条件由云层液态水含量、云层水滴平均有效直径和周围空气温度3个变量决定[21],η值越大,表明结冰对气动参数的影响越大,通常气象因子取值为0~0.3[20];kC(A)为飞机结冰因子,对于特定飞机,其值为定值,通常通过试验或飞行仿真计算获得。
多数研究将表征结冰严重程度的气象因子η设定为一个定值[19-20,22-23]。然而结冰是一个动态变化的过程,因此提出结冰恶化速率因子ζ,用于表征气象因子η随时间的变化情况。令η是时间的一次函数,则结冰前后气动参数模型为
ξ=η/(t-t0)
(9)
(10)
式中:t0为结冰开始时间。
当一侧机翼除冰系统发生故障时,两侧机翼将产生升力差和阻力差,进一步产生附加滚转力矩和偏航力矩,较对称结冰情况更复杂、风险更高,因此需进一步构建不对称结冰情况下的仿真模型。Lampton和Valasek[24-25]据此提出两侧机翼的升力差模型、阻力差模型、非对称结冰滚转力矩模型和偏航力矩模型,以右侧机翼除冰系统故障为例:
(11)
式中:CLice和CDice分别为结冰后的升力系数和阻力系数;dmgc为平均空气动力弦长位置到飞机中心线的距离;Q为动压;Sw为机翼面积;CL和CD分别为干净构型下的升力系数和阻力系数。将式(11)代入飞机运动方程,即可进行非对称结冰条件下的飞行仿真。
需要强调的是,结冰不仅会引起气动参数的变化,同时将缩小飞行安全关键参数的可用范围,以失速迎角为例,结冰后的失速迎角计算模型为
(12)
式中:αstall为失速迎角。需要说明的是上述结冰影响模型适合初步分析结冰对气动参数的影响,若进行高精度的数值模拟,可以通过风洞试验记录下不同迎角和结冰程度条件下的飞行安全参数范围,以数据库的形式存储在计算机中,通过插值调用。
2 飞行安全谱
当前预测飞行风险的一般方法是观测部分飞行安全关键参数是否超限。飞机手册对飞行安全参数的描述是确定性的,如巡航条件下,某型飞机最大纵向正过载限制值为3.75,即正向过载值3.75是安全和危险的分界线。但是人们对于这种限制的认知却是模糊的,如飞机纵向正过载达到3.7时也是非常危险的状态。因此,Burdun[26-27]提出将飞行安全参数值进行区间化处理,通过标注不同颜色划分风险等级。但是该方法仅能表示飞行风险,不能反映飞行安全参数超限的方向性,无法给驾驶员提供明确的操纵建议,同时在复杂情况下时刻关注多个飞行安全参数易增加驾驶员的操纵负荷。尤其突出的是,复杂环境下飞行安全参数许用范围可能发生畸变,即同样的操纵量,飞机的响应可能异常变化而超出驾驶员的期望。因此本文考虑飞行安全参数风险区间的正负性和特定环境下的飞机动态响应特性,结合诸多飞行安全关键参数及其特定条件下的许用范围,计算飞行安全操纵空间,给出更加合理明确的驾驶员操纵策略。
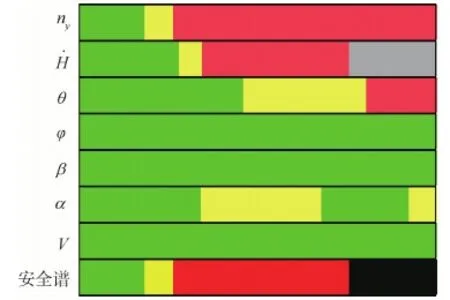
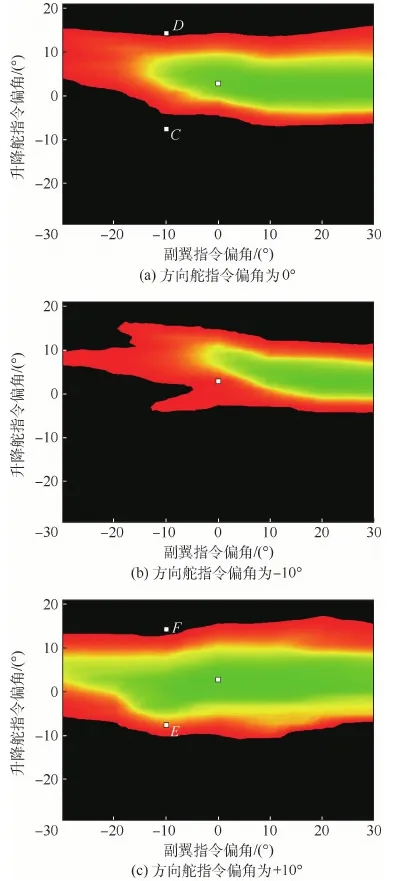
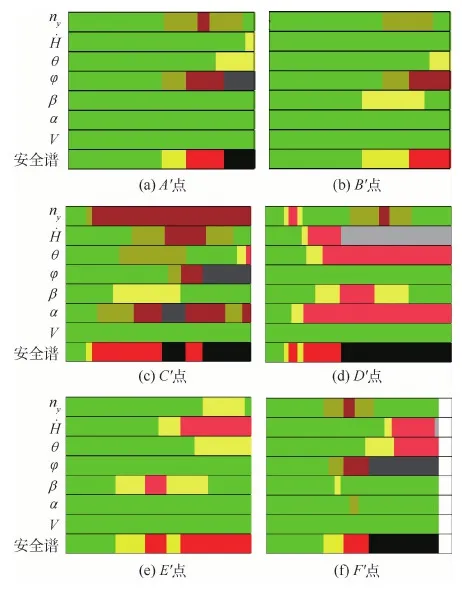
Cacciabue[28]建议屏显颜色最佳数量为3~5个,本文选取灰、红、黄、绿 4个颜色表示飞行安全参数风险等级,其中灰、红、黄 3色分别用深浅2个颜色表示负超限和正超限[29],表1给出了高度3 000 m,速度150 m/s平飞状态下的参数区间划分实例。当x 通过人-机-环闭环仿真系统计算每个飞行安全关键参数,得到预测时间段内飞行安全参数的变化轨迹,分别确定每个飞行安全参数的色彩化区间分布,如图1所示。因为任何一个飞行安全关键参数的超限均有可能导致高飞行风险,因此预测时间段内的飞行安全谱为每个时刻各个飞行安全关键参数的最高风险色的叠加。背景飞机在平飞状态下以升降舵和副翼协调操纵下降转弯为例计算该飞行状态下各个飞行安全参数的安全谱,如图2所示,图中最下一行安全谱为预测时间段内的综合安全谱。由于浅灰、深灰,浅红、深红,浅黄、深黄分别表示风险区间的正负性,其代表的风险程度是相当的,故在计算总的飞行安全谱时,浅灰、深灰同用黑色表示,浅红、深红同用红色表示,浅黄、深黄同用黄色表示。需要说明的是,飞行员操纵动作具有方向性,在构建飞行安全操纵空间时以正负号的形式表示。 表1 安全相关的飞行参数色彩化区间实例 图1 法向过载时变曲线及相应的风险色谱图Fig.1 Time history and corresponding risk chromatogram for vertical overload 图2直观地给出了不同飞行安全参数的变化情况,在进行协调下降转弯的过程中,高度变化率和法向过载变化幅度最大,且在仿真末期高度变化率超限。因此,将高度变化率和法向过载确定为协调下降转弯操纵程序的主要敏感参数,驾驶员在操纵过程中需多加留意。 图2 某转弯指令情形下的飞行安全谱Fig.2 Flight safety spectra under a certain turning instruction condition 图2给出了指定操纵状态下预测时间段内的风险演化过程。然而,不同操纵量所对应的飞行安全谱是不同的。为衡量不同操纵动作的飞行风险等级,本节根据飞行安全谱所包含的风险信息,通过计算不同风险色所占百分比并赋权相加,量化计算指定操纵动作的风险值。 设定风险色黑、红、黄、绿分别占整个预测时间段的百分比为Pb、Pr、Py、Pg,将每个风险色代表的风险值定义为Vb、Vr、Vy、Vg,那么整个预测时间段内的风险值可表示为 R=PbVb+PrVr+PyVy+PgVg (13) 一旦安全谱中出现黑色区域即表示存在飞行安全参数超出许用范围的情况,可认为发生飞行事故,为清楚地区分飞行事故,黑色所对应的风险值Vb较大,若飞行安全参数超限,该操纵状态下的飞行风险要明显得高于其他安全操纵状态。因此,设定Vb=30、Vr=4、Vy=2、Vg=1。据此,图2飞行过程所对应的风险值为1.828 0。 飞行安全谱可以直观地表示飞机以某操纵指令飞行过程中的风险演化过程;单一操纵指令下飞行风险量化是构建整个操纵空间飞行风险拓扑云图的基础。以副翼指令偏角、方向舵指令偏角和升降舵指令偏角构建三维操纵空间,将计算区域划分为若干计算单元,每个单元即对应了一种操纵指令下的飞行情形,运用上述方法计算该指令下的飞行风险值,进而可得到整个操纵空间的风险拓扑云图。每个计算单元之间是独立的,风险值的计算互不干扰,因此可以调用MATLAB rapid accelerator模块进行并行计算,以加快计算进程提高时效性。 本文选取不同色彩表示不同风险值,因风险值跨度较大,为更加清晰地区分不同风险值所对应的颜色,提高风险色的分离度,本文将所有飞行风险值大于4.5的飞行情形均取为4.5。由第3节分析可知,当风险值大于4时,预测时间段内部分参数超限,因此风险阈值设定为4.5既能保证区分事故状态,又能保证低风险状态所对应的风险分离度。 图3为根据当前飞行状态预测未来5s内的飞行安全操纵空间,初始飞行状态为高度3000m,速度150 m/s。图中白色方块为当前驾驶杆(盘)所对应的舵面位置,下同。为清晰地观察不同方向舵偏角下的驾驶杆安全操纵情况,图4给出了指定方向舵指令偏角下的驾驶杆安全操纵窗口,结合第5节案例再做具体分析。 图3 正常状态下飞行安全操纵空间Fig.3 Flight safety manipulation space in normal state 图4 正常状态下飞行安全操纵窗口Fig.4 Flight safety control windows in normal state 本节以GJB 626A—2006中飞机结冰科目(No.44)为背景[30],分别介绍对称结冰和非对称结冰2种情形下的飞行安全操纵空间,并分析2种情形下的事故致灾机理。 5.1.1 结冰情形下的飞行安全操纵空间计算 飞机的初始状态为H0=3 000 m,V0=150 m/s,从0 s开始进入结冰区域。升降舵指令偏角、副翼指令偏角、方向舵指令偏角的计算范围分别设定在de=[-30°∶2°∶20°],da=[-30°∶2°∶20°],dr=[-45°∶2°∶54°],计算节点数为26×31×46=37 076个,结冰恶化速率因子取常值,气象因子随预测时间呈线性变化,终值为0.15。对称结冰和右侧机翼除冰系统故障的非对称结冰情形下的安全操纵空间如图5和图6所示。分别选取方向舵指令偏角为0°、-10°和+10°时的驾驶杆操纵窗口进行分析,如图7和图8所示。 图5 对称结冰时的飞行安全操纵空间Fig.5 Flight safety manipulation space under symmetric icing condition 图7 对称结冰时的飞行安全操纵窗口Fig.7 Flight safety manipulation windows under symmetric icing condition 图8 右侧机翼除冰系统故障时的飞行安全操纵窗口Fig.8 Flight safety manipulation windows for right wing anti-icing device failure 根据仿真结果可直观地发现,未结冰和对称结冰情况下,图4(a)和图7(a)均左右对称;且方向舵指令相反时,图4(b)与(c),图7(b)与(c)分别左右对称。但结冰条件下的飞行安全操纵空间明显缩减,如图4(a)和图7(a)所示,升降舵负操纵范围由-13°缩减为-10°。当方向舵指令偏角不为0°时,升降舵负操纵范围缩减更显著。在带有方向舵指令的操纵窗口中,绿色“安全”范围和“红色”危险范围也相应缩减,红色宽度的缩减说明危险梯度的增加,驾驶员尤其需要注意颜色梯度变化剧烈的区域。需要指出的是,因为仿真过程模拟的是机翼结冰,因此对于未结冰的升降舵正操纵影响不明显。 当右侧机翼的除冰系统发生故障时,飞行安全操纵空间不但缩减严重且出现了不对称现象,如图8(a)所示,此时副翼负操纵方向安全操纵区域显著缩减,即向除冰系统故障一侧滚转更危险。当方向舵指令偏角为正时,如图8(c)所示,安全操纵范围扩大(对比C和E点,D和F点),因为右侧机翼无法除冰导致出现升力差,向左压杆和向左蹬舵均能够促进左右机翼升力平衡,所以驾驶员在发现右侧机翼故障时,需努力减小两侧机翼的升力差。此外,由于红色范围的大幅缩减,危险梯度明显升高,驾驶员必须柔和操纵,避免操纵过量。 5.1.2 结冰情形下的安全操纵机理分析 为研究对称结冰和非对称结冰条件下的飞行事故诱发机理,选取6个典型事故状态(如图4(a)中A点,图7(a)中B点,图8(a)中的C、D点,图8(c)中的E、F点,分析其飞行安全谱(如图9所示),以探究结冰条件下驾驶员操纵方法。仿真程序设定,当滚转角达到150°时,即认为飞机状态不可恢复,飞行事故不可避免,仿真终止,如图9(c)所示。 状态点A、B、C、E的操纵输入指令相同,对比状态点A~C发现,结冰条件下飞机下降过程中,滚转角最容易超限,若伴随着方向舵指令协调操纵,如状态点E,能够在一定程度上抑制滚转角的超限,但该状态下滚转角业已达到危险状态,因此在结冰状态下协调下降时,滚转角为主要敏感参数,需特别注意滚转角是否超限。 状态点D和F的驾驶杆操纵输入指令相同,方向舵指令不同,但在爬升过程中均出现了高度变化率超限,但滚转角和速度均保持在安全的范围内。对比图7和图8发现,对称结冰对飞机爬升影响较小,但由于对称结冰仅存在理论的可能,因此驾驶员在结冰条件下爬升以脱离云层的操纵过程中,高度变化率为主要敏感参数,必须柔和操纵驾驶杆,减小拉杆幅度,缓慢爬升,避免参数超限,诱发飞行风险。 图9 结冰情形下典型状态点飞行安全谱Fig.9 Flight safety spectra for typical state points under icing conditions 从事故演化过程分析,由于结冰导致气动性能恶化,不对称结冰易产生升力差,若要降低飞行高度脱离结冰云层,需注意驾驶杆和脚蹬的协调操纵,蹬舵方向与除冰系统故障方向相反,重点关注滚转角的变化情况;若要爬升以脱离结冰云层,需重点关注高度变化率的变化情况,柔和操纵,减小拉杆幅度,避免参数超限。 依据SAE ARP4761的要求,主舵面卡阻包括单侧副翼舵面卡阻、单侧升降舵面卡阻和方向舵面卡阻3个科目,在型号合格审定试飞中属于高风险科目[31]。其中,方向舵面卡阻较为严重,属于Ⅱ类(失效概率为10-7)飞控系统危险性功能故障,较飞行事故10-9的概率大了2个数量级。以方向舵面卡阻为例,介绍飞行安全操纵空间。 5.2.1 方向舵面卡阻情形下的飞行安全操纵空间计算 本节的飞机初始状态和计算节点范围同5.1节,平飞状态下驾驶员蹬舵进行航线纠偏发生方向舵面卡阻,以方向舵面卡阻在-15°位置为例。方向舵面卡阻时的驾驶员飞行安全操纵空间如图10所示。 根据仿真结果可以清晰地看出,由于方向舵面卡阻,驾驶员飞行安全操纵空间大幅缩小。当前舵面位置为图10(a)中F′点所对应的方块,此构型下,驾驶员驾驶杆横向安全操纵范围由配平位置的全量输入缩减为[-2°,30°],驾驶杆纵向安全操纵范围由[-14°,20°]缩减为[-10°,14°],且驾驶杆的纵向和横向操纵必须协同。 方向舵面卡阻在-15°的位置,不但导致安全操纵范围缩减,同时出现了不对称的情况:对于绿色区域飞机安全范围偏向右侧区域(即副翼取正值一侧),以平衡方向舵面卡阻引入的偏航力矩;图中黄色区域和红色区域下边界急剧减小,表明操纵危险梯度较大,驾驶员要特别注意该范围内操纵量的变化,黄色区域的上边界范围较宽,表明该区域的操纵安全裕度较大,飞行安全参数变化波动对操纵量的依赖性较低,能够保持在安全范围内。 图10 方向舵面卡阻时的飞行安全操纵空间Fig.10 Flight safety manipulation space under ruder jammed conditions 1) 飞行安全操纵空间不对称原因分析 飞机发生方向舵面卡阻在-15°时,副翼正操纵一侧的可用范围较大,负操纵一侧几乎不可用,为分析原因,在图10(a)中选取2个状态点A′和B′进行对比。这2个状态点对应的飞行安全谱如图11(a)、(b)所示。 对比图10(a)中A′、B′ 2个状态点,当飞机偏向方向舵故障一侧滚转时,极易引发滚转角迅速超限,而向另一侧滚转时,安全范围较大,但是当副翼正值选取过小时,在预测时间段的末尾,滚转角由于不能完全平衡方向舵引起的偏航力矩和滚转力矩,滚转角发展缓慢但也有正超限趋势,因此驾驶员需特别注意,缓慢正压杆修正副翼输入量,以平衡滚转力矩和偏航力矩。因此,方向舵面卡阻条件下,滚转角为主要敏感参数。 2) 油门影响分析 图10中给出了不同速度状态下方向舵面卡阻在-15°位置时的飞行安全操纵窗口,对比分析可得,飞机突遇方向舵面卡阻时,适当收油门降低飞行速度,安全操纵范围有增大趋势,当然必须与驾驶杆进行协同操纵。因此,在方向舵面卡阻故障模式下,油门操纵量较为敏感。 图11 方向舵面卡阻情形下典型状态点飞行安全谱Fig.11 Flight safety spectra for typical state points under rudder jammed conditions 5.2.2 方向舵面卡阻情形下的安全操纵机理分析 为研究方向舵面卡阻情形下的飞行事故致灾机理,选取图10(a)中4个典型状态点C′~F′,这4个状态点的参数及其所对应的飞行安全谱如图11(c)~(f)所示。 方向舵面卡阻时,若驾驶员不进行操纵,飞机将快速滚转,快回路中的滚转角超限并不可逆。仿真中设定当滚转角达到150°时仿真即停止,如图11(f)所示,在仿真设定结束时间前(4.62 s时),滚转角已到达极限值,仿真停止。状态点C′、D′和E′的副翼操纵指令相同而升降舵操纵指令不同。对比分析发现,状态点C′的拉杆操纵指令虽然刚刚超出安全范围,但迎角和滚转角均迅速超出右边界,且滚转角超限后没有恢复到安全范围的趋势;状态点D′推杆指令略大于安全范围,迎角处于危险状态,但高度变化率则迅速超出左边界,5 s内飞机高度降低约200 m。当缓慢协调操纵驾驶杆,从初始状态位置F′到E′点的过程中,飞行速度保持平稳,高度略有降低,且滚转角保持在30°之内。副翼和升降舵的协调操纵能够使得飞机较好平稳运行。 从事故演化过程来看,往往是由于方向舵面卡阻引入了较大的偏航力矩,若不能及时操纵副翼抵消偏转力矩,并协调拉杆,保持一定的俯仰角,飞机很容易急速滚转并下坠,引发飞行事故。因此,在出现方向舵面卡阻的情况下,应及时反向操纵副翼以抵消偏航力矩和滚转力矩,并协调小幅度拉杆以保持飞行高度和速度。驾驶员和飞控系统应重点关注敏感参数:高度变化率和滚转角,与Trujillo和Gregory[7]的研究结论相似。 1) 基于人-机-环复杂系统动力学仿真,提出了飞行安全操纵空间的构建方法。通过对称结冰、非对称结冰、主舵面卡阻等典型案例,分析了飞行安全操纵空间的构建方法,飞行事故演化过程,不同飞行状态下的敏感参数确定方法和飞行事故诱发机理。飞行安全操纵空间能够直观地显示当前安全操纵裕度和安全操纵轨迹,提高驾驶员复杂环境下和故障模式下的情景感知能力,降低驾驶员工作负荷,尽量降低误操纵或粗暴操纵引发的飞行风险,保障飞行安全。 2) 本文案例均是以某大型运输机为背景构建飞行安全操纵空间,受机型气动特性、故障模式和环境因素建模准确性的影响,不同飞机的飞行安全操纵空间略有不同,重点阐述了飞行安全谱、风险量化和飞行安全操纵空间的计算方法,对复杂情形下的致灾机理和安全操纵具有一定地借鉴意义。对飞行安全操纵空间的合理化显示,外部环境模型和故障模式模型的精准化构建以及不同飞行状态下飞行安全参数风险区间数据库构建有待进一步研究完善。 3) 此外,本文方法可以用在飞行员培训,飞行控制律参数优化,飞行边界保护和飞行事故可视化重现等方面。


3 飞行风险量化
4 飞行安全窗设计


5 案例分析
5.1 结冰情形下的飞行安全操纵空间



5.2 主舵面卡阻情形下的飞行安全操纵空间

6 结 论
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
作文周刊·小学一年级版(2022年24期)2022-06-18
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
学校教育研究(2020年11期)2020-06-08
航空科学技术(2019年2期)2019-09-10
科技与创新(2019年2期)2019-02-14
小天使·一年级语数英综合(2019年2期)2019-01-10
汽车电器(2018年1期)2018-06-05
小学生导刊(低年级)(2017年1期)2017-06-12
