
坦克火控系统瞄准线平移的补偿方法
2018-10-08 06:43南立军刘文齐
火炮发射与控制学报 2018年3期
郝 强,南立军,刘 斌,刘文齐
(中国北方车辆研究所 信息与控制技术部,北京 100072)
先敌发现、先敌打击、首发命中是未来主战坦克火控系统发展的方向,也是决定坦克对攻作战成败的关键。在现实作战条件下,坦克火控系统的性能,尤其是高速机动条件下的精确打击性能成为保全自己、消灭敌人的杀手锏。笔者对现代坦克火控系统在高机动条件下的瞄准线平移及其补偿方法进行研究,以期降低瞄准难度,减小瞄准误差,提高射击命中率[1-2]。
1 稳像式火控系统工作原理
现代坦克普遍使用稳像式火控系统。稳像式火控系统的特点是瞄准线和火炮分离,分别有独立的稳定装置,其工作原理图如图1所示。稳像式火控系统中,火炮不再受炮手直接控制,而是随动于瞄准线。炮手通过操纵台驱动瞄准线(上反射镜)瞄准目标,由瞄准镜和火炮位置传感器得到瞄准线与火炮的失调角。火炮控制器以此失调角为输入,驱动火炮高精度随动于瞄准线。炮手对目标进行测距时,火控计算机进行弹道解算并驱动火炮控制器控制火炮装定射角和提前量,之后炮手可以进行击发[3]。

使用双轴陀螺对瞄准线稳定平台进行稳定,陀螺的两个敏感轴分别与被稳定平台的方位、俯仰轴相平行。在一般情况下,平台的支承和电刷、滑环中总会存在一定的摩擦,平台部件的平衡也不会达到理想状态,还有导线及各种电磁元件也会产生干扰力矩,所以,在运载体或基座相对惯性空间转动时,平台就会跟运载体或基座一起转动。陀螺敏感平台的转动,输出相应的角速度信号,这个信号经过校正和功率放大后,控制平台的稳定电机产生相应的扭转力矩,使平台向基座转动的相反方向运动以回到初始位置,从而实现平台的稳定。
稳像式火控系统中的优点是瞄准线可以得到高精度的稳定(稳定一个光路元件无疑要比稳定一个火炮容易得多),使得车体运动时炮手仍可以搜索和瞄准目标。当瞄准线和火炮的失调角小于允许的门限时,即可进行击发[4-5]。
2 稳像式火控系统的瞄准线平移
稳像式火控系统可以克服车体运动时俯仰向的角度颠簸,可以克服方位向车体转弯带来的角度误差。但是陀螺稳定控制系统的原理决定了稳像式火控系统无法克服车体线运动带来的误差。在高低向,地面的高度起伏相对于目标的距离很小,可以忽略不计。在方位向,车体高速运动时必然会带来瞄准线的平移。
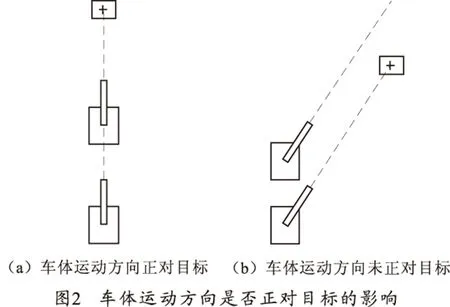
如图2所示,如果车体运动方向正对着目标,则车体运动过程中瞄准线可以始终瞄准目标;如果车体运动方向不是正对着目标,则车体运动过程中瞄准线会产生平移,逐渐脱离目标。
如果火控系统具备自动跟踪功能,此时可以使用自动跟踪使瞄准线跟踪目标。如果火控系统不具备自动跟踪功能,就需要射手扳动操纵杆不断调整瞄准线位置以跟踪目标。在目标距离2 km,坦克车速30 km/h的条件下,射手最大需要控制瞄准线以约4.2 mrad/s的角速度运动跟踪目标。在坦克高机动运动,尤其是车速忽快忽慢时,瞄准线平移会使瞄准难度提高,瞄准误差增大,影响射击命中率。
3 瞄准线平移的补偿方法
如图3所示,车体运动引起瞄准线平移时,在不增加硬件成本的情况下,利用现有传感器数据,实时计算瞄准线的补偿角速度值,驱动瞄准线自动运动,使瞄准线始终跟踪目标,减小瞄准误差,提高射击命中率。实现瞄准线平移补偿,需要获取以下传感器信息。
需要获取初始时刻车体到目标的距离,将其定义为D,通过火控系统激光测距机可获取距离。

需要获取初始时刻火炮相对车体的角度,将其定义为α。通过火控系统炮塔方位角传感器可获取火炮角度,定义火炮朝正前时α为0,火炮向右转动时α逐渐增大,α的取值范围为0°≤α<360°。
需要获取车体速度,将其定义为v。通过车内总线可以从坦克变速箱获取车体速度,定义车体前进时速度为正,车体后退时速度为负。
定义ts为解算周期,α1为当火炮始终瞄准目标时一个解算周期后火炮的角度。为使火炮始终瞄准目标,火炮的补偿运动速度为ω,则有
(1)
定义火炮向右旋转时ω为正。将补偿运动速度ω与瞄准信号进行叠加,瞄准线控制器即可控制瞄准线始终跟踪目标。
一个解算周期之后(即ts时刻),以当前时刻为初始时刻,按照上述解算过程可进行循环解算,使得火炮始终瞄准目标。对于瞄准线控制系统而言,平移补偿相当于前馈,不会影响控制系统的稳定性。
从以上分析可知,只要求得α1,就可以得到瞄准线的补偿角速度。解算α1分为4种情况,下面分别进行说明。
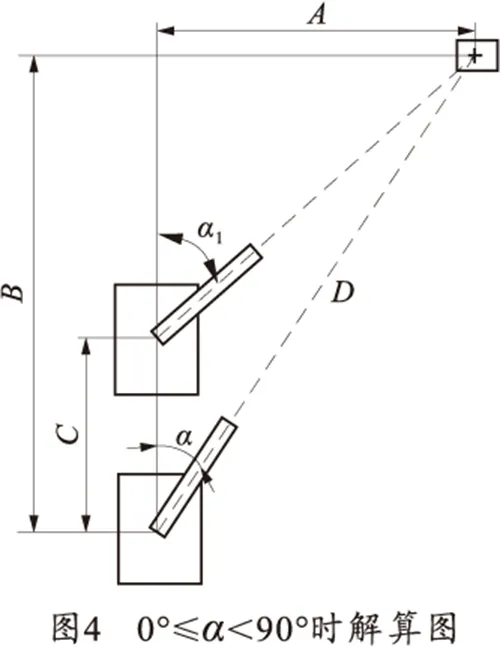
3.1 当0°≤α<90°时的解算
如图4所示,A为初始时刻车体到目标距离的水平分量,B为初始时刻车体到目标距离的垂直分量,C为ts时间后车体移动的距离。根据解算图有:
A=Dsinα
(2)
B=Dcosα
(3)
C=vts
(4)
3.1.1v≥0时
当B>C时,有
(5)
当B=C时,有
α1=90°
(6)
当B (7) 3.1.2v<0时 (8) 如图5所示,此时有 A=Dsin(180°-α) (9) B=Dcos(180°-α) (10) C=vts (11) 3.2.1v≥0时 (12) 3.2.2v<0时 当B>|C|时,有 (13) 当B=|C|时,有 α1=90° (14) 当B<|C|时,有 (15) 如图6所示,此时有 A=Dsin(α-180°) (16) B=Dcos(α-180°) (17) C=vts (18) 3.3.1v≥0时 (19) 3.3.2v<0时 当B>|C|时,有 (20) 当B=|C|时,有 α1=270° (21) 当B<|C|时,有 (22) 如图7所示,此时有 A=Dsin(360°-α) (23) B=Dcos(360°-α) (24) C=vts (25) 3.4.1v≥0时 当B>C时,有 (26) 当B=C时,有 α1=270° (27) 当B (28) 3.4.2v<0时 (29) 为验证瞄准线平移的补偿效果,在某型号坦克靶场试验期间,在同样的距离、路面、车速和火炮初始角度条件下,让同一个炮长控制瞄准线瞄准目标,通过瞄准镜CCD记录的视频,分析不使用瞄准线平移补偿和使用瞄准线平移补偿的瞄准精度。瞄准镜CCD记录的靶板和十字线视频画面如图8所示。 瞄准镜CCD记录的视频帧率为25帧/s,逐帧分析十字线中心距离靶心的距离,结合靶面大小和坦克距靶面距离,计算得到每帧的水平瞄准误差[6],如图9所示。 不使用瞄准线平移补偿时,平均瞄准误差为0.16 mrad;使用瞄准线平移补偿时,平均瞄准误差为0.11 mrad,可见平移补偿显著减小了瞄准误差。 陀螺稳定控制系统的原理决定了稳像式火控系统无法克服车体线运动带来的误差,车体高速运动时必然会带来瞄准线的平移。笔者通过分析稳像式火控系统的工作原理,提出了一种补偿方法,在不增加硬件成本的情况下,利用现有传感器数据,实时计算瞄准线的补偿角速度值,驱动瞄准线自动运动,使瞄准线始终跟踪目标,降低瞄准难度,减小瞄准误差,提高射击命中率。该补偿方法已经在某型号坦克火控系统中应用,取得了良好的效果。3.2 当90°≤α<180°时的解算

3.3 当180°≤α<270°时的解算

3.4 当270°≤α<360°时的解算

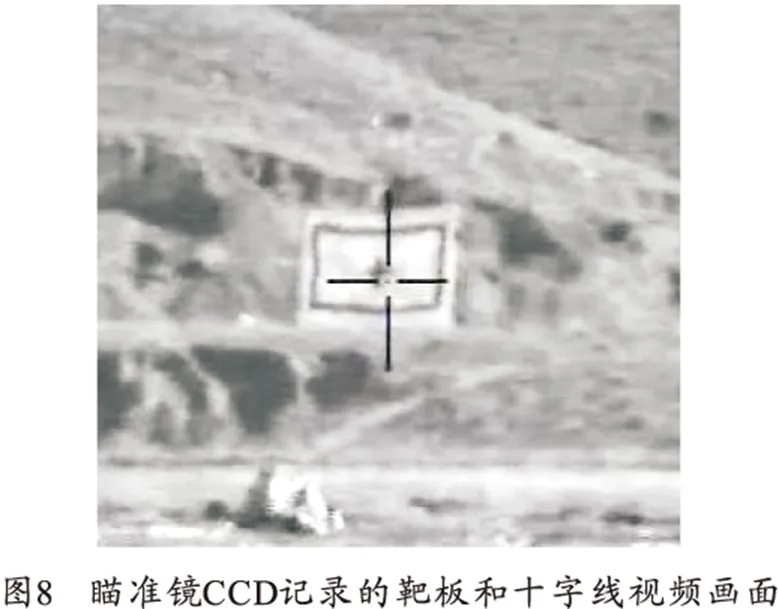
4 补偿效果
5 结束语
猜你喜欢
城市轨道交通研究(2022年2期)2022-11-18科学与生活(2021年24期)2021-12-06中国新通信(2017年11期)2017-07-16科技创新导报(2016年28期)2017-03-14电子技术与软件工程(2017年1期)2017-03-06现代兵器(2017年1期)2017-02-13卷宗(2016年10期)2017-01-21专用汽车(2016年12期)2016-02-11计算机辅助工程(2012年5期)2012-11-21小哥白尼·军事科学画报(2009年8期)2009-08-13
