
某型自行榴弹炮弹丸卡膛深度监控系统设计
2018-10-08 06:43蔡灿伟焦贵伟宁全利陈翠华
火炮发射与控制学报 2018年3期
蔡灿伟,焦贵伟,宁全利,刘 闯,陈翠华
(1.陆军炮兵防空兵学院 武器系统技术教研室,安徽 合肥 230031;2.陆军炮兵防空兵学院 高过载弹药制导控制与信息感知实验室,安徽 合肥 230031)
某新型榴弹炮自装备以来,身管寿命为1 000发左右,离1 500发的设计指标还存在很大的距离。技术人员结合部队日常实战训练和勤务保障的情况,发现该炮全自动输弹系统故障率较高,经常出现不同射角下弹丸装填不到位的现象。
当弹丸高射角装填不到位时,在重力分量的作用下,弹丸会从装填处滑下,容易被发现,只需二次装填即可;而弹丸低射角装填不到位时,此时摩擦阻力大于重力分量,弹丸不足以滑落,如果火炮长时间将这种装填不到位的弹丸发射出去,就会造成:一是加快火炮膛线起始部的磨损,从而降低身管的使用寿命;二是增大射弹散布,从而使火炮射击精度的下降。
由此可见,全自动输弹系统既是火炮火力发挥的关键,又是制约部队实战训练的瓶颈。全自动输弹系统工作是否可靠,进而弹丸能否装填到位将直接影响到火炮的作战效能。因此,如何快速、准确、可靠地检测出弹丸装填状态并加以控制,是目前亟需解决的问题。
针对这一实际问题,考虑到弹丸装填到位以后,弹底与火炮膛底的距离为一定值,激光测量技术已能在微烟雾的条件下完成距离的精确测量,数据处理、自动控制和声光报警技术已在多种军事检测设备中得到广泛的应用,笔者采用激光测距、声光报警和单片机技术,设计了一种全自动输弹系统弹丸卡膛深度监控系统,将对火炮全自动输弹系统作战效能的进一步发挥起到一定的作用[1-2]。
1 弹丸卡膛深度监控系统实现原理
要实现对弹丸卡膛深度的自动监控,首先必须明确弹丸自动装填工作过程。
1.1 弹丸自动装填工作过程
火炮全自动输弹系统主要由供弹机、协调器、开式防护仓、输弹机、输弹液压系统及电器控制部分等组成,如图1所示。

图中,该型火炮输弹机采用的是电控液压驱动链条往复推送式液压输弹机,活动地连接在火炮右侧的开闩支臂上,由齿轮箱体、凸轮、链盒、链条、推壳机构、测速装置和手动机构等组成,如图2所示。输弹系统工作时,弹丸被装填,具体过程为:系统启动后,先由供弹机向协调器上供弹;协调器接弹以后,向炮身射角协调,再由翻转油缸将弹丸翻转到输弹线;此时压力油进入输弹油缸内腔,迫使输弹机活塞杆伸出,齿条带动齿轮组和链轮转动,使链条迅速伸出进而推送弹丸进入膛内并可靠卡膛,待链条伸出到设定长度时,另一股压力油进入输弹油缸外腔,迫使输弹油缸活塞返回,齿条带动链条收回,从而完成整个弹丸的装填过程,进而火炮进入自动输药状态[3-4]。

由上述可知,弹丸能否可靠卡入膛内最终是由液压式输弹机来完成的。当弹底到膛底的距离达到预定值以后,链条迅速收回进而火炮转入自动输药状态,收链和输弹到输药信号之间的转换过程极为短暂,只需要0.2 s左右的时间。也正是因为如此,所设计的弹丸卡膛深度监控系统必须在这个时间之内完成所有工作。
1.2 系统总体设计方案与工作原理
基于某型自行榴弹炮存在弹丸自动装填不到位的实际问题,所设计的弹丸卡膛深度监控系统,需要完成3个功能:
1)在微烟微雾条件下,通过测量弹底与膛底间的距离,对弹丸卡膛深度进行自动检测。
2)将系统测出的距离与弹丸装填到位后的标准距离比对,对弹丸装填是否到位加以评判。
3)将系统评判出来的弹丸是否装填到位的信号结果及时反馈给自动输药系统,从而及时控制药筒的自动装填过程。
以上就是弹丸卡膛深度监控系统在设计过程中极为关键的3个功能模块。
针对系统第2、3功能模块的设计,可以采用相应的声光报警和信号开关模块来实现;对于火炮膛底与弹底间距离的测量,则需要通过激光测距来实现。激光测距的工作原理就是通过测量激光在火炮膛底和弹底之间往返所用的时间来计算出激光所通过的距离,具体关系式为
(1)
式中:d为弹底与膛底之间的距离;c为激光在空气中的传播距离;t为激光在膛底与弹底之间往返所用的时间。
通过上述的设计,使激光测距传感器自身的测量精度能够达到毫米级,即可实现对该型自行火炮弹丸卡膛深度进行监控。
2 弹丸卡膛深度监控系统总体设计
某型自行榴弹炮弹丸卡膛深度监控系统功能结构框图如图3所示。它主要由激光收发器、输入模块、中央处理模块、数据存储模块、信息显示模块、声光报警模块、输药信号切断模块、充电供电模块、复位键控开关、系统启动开关和输出模块等组成。
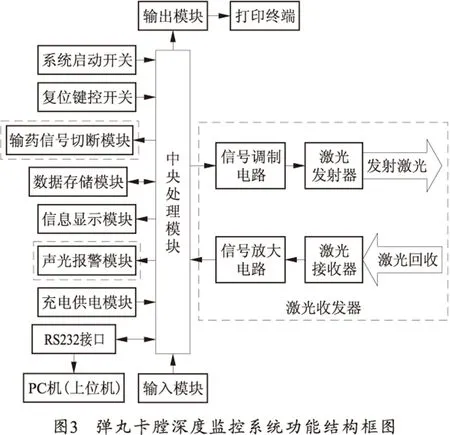
系统主要模块作用如下:
1)激光收发器主要由信号调制电路、激光发射器、信号放大电路以及激光接收器等组成。它的主要作用就是系统工作时,向外发射激光,激光碰到弹底反射,反射光被激光接收器接收,经信号放大电路放大后传给中央处理模块。
2)声光报警模块主要由平滑电路、触发器和声光报警器电路等组成。它的主要作用就是将系统检测到的脉冲信号进行平滑,之后送入触发器,一旦信号超过触发器触发阀值,报警电路接通,向外发出声光报警。
3)输药信号切断模块主要由继电器和开关电路等组成。它的主要作用是当系统检测到弹丸自动装填到位时膛底与弹底之间的距离小于标准值时,系统给继电器一个调机信号,输出一个开关量控制自动输药工作停止。
图4为某型自行榴弹炮弹丸卡膛深度监控系统工作流程图[5-7]。

弹丸卡膛深度监控系统接通电源启动并开始初始化,并完成当前火炮状态弹丸卡膛深度标准值的标定。当系统检测到火炮弹丸自动装填系统收链时,距离运算子程序启动开始计算,并将计算得出的火炮膛底与弹底之间的距离与声光报警模块设定的触发阀值进行对比。检查结果若显示小于触发器触发阀值,输药信号切断模块开始工作,向外发射一个自动输药关闭信号给火炮火力系统,指导火炮使用者进行火炮检查保养,进而进行弹丸的二次装填;检查结果若显示大于触发器触发阀值,检测系统就向外发射数据并进行存储显示,同时自动输药系统正常工作进行药筒的装填,从而完成弹丸卡膛深度的自动监控。
3 弹丸卡膛深度监控系统试验分析
弹丸自动装填到位后火炮膛底与弹底间的距离可以在监控系统上显示出来,通过与标准值进行对比,即可判断出弹丸是否装填到位。为了验证所设计的系统性能是否能够达到设计要求,在某一工况条件下,以3门某型自行火炮为试验对象(1#正常,2#、3#人为设定故障),利用弹丸卡膛深度监控系统测量弹丸是否装填到位,测量时激光收发器安装位置如图5所示,所得试验结果如表1所示。

表1 不同火炮测量结果

项目火炮1#2#3#标准值/m2.5652.5402.520测量值/m2.5682.5352.516差值/mm+3-5-4测量时间/s0.140.150.14声光报警是否工作否是是
分析表1中的测量结果,可以得出以下几个结论:
1)某型自行榴弹炮弹丸卡膛深度监控系统完成3门火炮的测量所用时间都控制在了0.15 s之内,完全可以在火炮全自动输弹系统链条收回、火炮转入自动输药状态之前完成所有测试工作,能够达到0.2 s的设计指标。
2)在对火炮测量之前,预先设定了1#火炮弹丸自动装填到位,2#和3#火炮弹丸自动装填未到位,而从测量结果声光报警是否工作这一栏的数据显示来看,测量1#火炮时系统声光报警模块未发出警报,测量2#和3#火炮时声光报警模块发出了警报,测量结果完全符合实验预先设计。
3)激光测距传感器自身测量精度较高,精度达到了毫米级,满足卡膛深度的测量精度要求。
从以上结论总体来看,系统所得到的结果能够一定程度地客观真实反映出火炮弹丸自动装填的状态,所得结果能够满足测量精度和设计指标的要求。
4 结束语
试验结果表明,所设计的某型自行榴弹炮弹丸卡膛深度监控系统,操作简单、野战性能好、可靠性和集成化程度较高,能够快速有效地完成弹丸卡膛深度自动监控,为自动检测火炮全自动输弹系统工
作状态是否良好奠定了一定的理论基础,为部队火炮装备预防性维修和勤务保障提供一定的参考依据。
猜你喜欢
疯狂英语·新读写(2021年10期)2021-12-07
小学生必读(中年级版)(2021年12期)2021-12-02
火炮发射与控制学报(2021年3期)2021-09-23
成都信息工程大学学报(2021年2期)2021-07-22
航天工业管理(2020年9期)2020-12-28
兵器装备工程学报(2020年3期)2020-04-22
兵器装备工程学报(2019年4期)2019-05-05
现代兵器(2017年1期)2017-02-13
体育科研(2014年5期)2014-04-16
小哥白尼·军事科学画报(2009年8期)2009-08-13
