高焓激波风洞试验技术综述
2018-10-08 12:06:12谌君谋毕志献马汉东
空气动力学学报 2018年4期
谌君谋, 陈 星, 毕志献, 马汉东
(中国航天空气动力技术研究院, 北京 100074)
0 引 言
高超声速飞行器因其飞行速度高,周围气体通过激波加热或者黏性阻滞减速,使得分子随机运动能量增加,产生数千度的高温,引起气体分子振动激发、离解、甚至电离,导致高超声速气体呈现真实气体属性[1]。高温条件下存在真实气体效应,强烈地改变了飞行器周围气体的物理属性和流场特性,是飞行器设计必须考虑的重要方向[2]。高超声速气体发生的化学反应或者不同能量模式之间的能量传递,给气体动力学试验和数值计算带来了挑战[3]。黏性相互作用和高超声速流动特有的薄激波层、高熵层等物理现象增加了高超声速流动研究的复杂性[4-5]。高超声速高温流动的研究主要包括剪切层的复杂性和尺度问题,边界层转捩、混合湍流流动、化学反应流和燃烧及声学等现象[6]。高超声速流动物理现象认识上的局限,导致其物理建模的不适当,进而使得数值计算存在一定的不确定性,因此通过试验研究高超声速流动规律显得非常重要。由于飞行试验成本较高,大量的试验研究需要在地面模拟设备中进行。
高超声速飞行器飞行条件范围广和需要研究的物理现象独特,使得单一高超声速试验设备无法满足试验需求[7],导致高超声速试验设备呈现多样化特征。对于风洞试验,目前无法对整个飞行包线开展气动热力学、气动光学、气动声学等一系列试验研究,只能对飞行试验之前的“关键路径”进行评估。通常我们采用的方法是部分模拟,主要分为三个范畴[8-9]。1) 在马赫数5~12的低高超声速区域,通过降低自由来流温度降低自由来流的声速,从而提高自由来流的马赫数,进而实现高超声速条件下马赫数和雷诺数(Ma-Re)的模拟。2) 在速度大于3 km/s(超高速)甚至超过4 km/s时,空气发生化学反应,需要模拟飞行环境下真实气体的速度、压力和温度条件。3) 在高度大于80 km小于130 km时,表征稀薄程度的参数Kn数范围为0.01~10,需要模拟Kn数、马赫数、物面平均温度和滞止温度之比等参数。
超高速流动带来的高温效应在常规“冷”状态的高超声速地面设备不能得到复现。用于模拟超高速流动高温效应的两个关键参数是来流速度(比焓)和双尺度参数ρL(ρ为密度,L为特征长度)[10]。对于空间再入飞行器和行星探测器返回地球时,其速度会超过6 km/s。如果模拟这个速度,热流超过300 MW/m2[9],连续式设备很难满足要求。高焓激波风洞为暂冲式风洞,能够产生非常高的温度和压力。虽然有效试验时间被限制在毫秒级,但由于大量先进测试仪器的成功运用,在短暂的有效时间内,已经能够用于研究飞行器在超高声速状态下的复杂气体动力学、气动光学、气动声学等问题[11]。另外,在高焓激波设备上还能开展超燃冲压发动机、抛壳和级间分离试验、电磁散射等技术的研究[12]。
驱动技术决定了高焓激波风洞试验段所能达到的总焓和总压水平。增加驱动气体压力和提高驱动气体声速能够有效增强驱动能力,使得高焓激波风洞在激波管产生的入射激波强度更强。不同的驱动技术都是基于简单的激波管而发展起来的。目前有效的驱动技术主要有变截面驱动、多段驱动、轻质气体驱动和加热轻质气体驱动。为了获得更高的总焓和总压,一般将不同的驱动技术有效结合,以提高入射强激波的强度。
高焓激波风洞为反射型激波风洞,激波管中的试验气体经过两次稳定的激波作用后温度和压力急剧升高。“高温高压的试验气体发生了很强的振动激发、离解或电离。气流在喷管的膨胀同时冷却过程中,振动松弛和复合反应再将其返回自然大气的状态,但这些过程需要时间去完成。由于膨胀过程中气流速度迅速升高,密度和温度迅速下降,流动来不及达到当地温度压力下的热化学平衡,在喉道下游不远处就趋于热化学冻结状态。喷管出口处,气流振动温度与平动温度有很大差别,化学组成也没有达到低温度下自然大气的水平。也就是说,高焓风洞自由流具有一定程度的热化学非平衡。”[13]这与高空大气不同,对试验结果产生不利影响,也给试验段自由来流参数的确定带来挑战。高焓激波风洞试验自由来流参数的确定需要将风洞试验和数值模拟紧密联系,使其相互验证。
入射强激波在激波管末端反射后,产生的反射激波与激波管边界层相互作用,在激波管近壁面处形成分叉区域;驱动气体经过分叉区域沿着壁面发生喷射,先于接触面到达激波管末端区域,对试验气体形成早期污染。驱动气体对试验气体的早期污染会改变自由来流气体组分,影响化学反应流动的测量;同时,早期污染问题会减少有效试验时间,进而影响试验结果以及试验精度。为了提高试验时间,必须减缓驱动气体的早期污染,发展污染气体推迟技术。
高焓激波风洞有效试验时间非常短,某些试验状态仅有1-5 ms。同时驻室温度(8000 K以上)极高,激波管末端气流滞止而产生巨大温升,导致喷管喉道融化和侵蚀,金属气化导致流动污染,使得对喉道区域流动产生干扰[14]、对流场带来一定的污染,而且对接触式测量仪器产生干扰破坏。此外,风洞运行时还存在严重的冲击载荷和振动干扰。因此,基于常规激波风洞发展的试验技术,难以直接在此类设备使用,甚至是完全无法使用。这就需要发展高焓测试技术,以满足气动学科发展和飞行器研制的需求。在高焓激波风洞进行的空气动力模拟试验中,试验测量方法主要包括流动测量和流动显示。通过各项空气动力模拟试验,测量相关数据,了解复杂的流动现象,为基础研究和工程应用研究中建立符合实际的数学模型提供高可信度的依据,而测试技术是获得各类数据的关键。
针对高焓激波风洞,本文系统介绍高焓激波风洞的驱动技术、流场检测技术、流场测试技术,分析了各种技术不同方法的优缺点及其实用性,最后重点综述了基本的试验测试技术。
1 驱动技术
对于高焓激波风洞,驱动技术是一个重要的基本环节,所谓驱动技术主要是指采用何种驱动方式获得入射激波[15],如何加热试验气体,并获得所需要的速度。不同的驱动技术都是基于简单的激波管发展起来的。
从20世纪50年代开始,流体力学相关领域的发达国家针对不同高性能驱动方式开展广泛研究[16-19],结果显示提高入射激波强度,获得所需要的高焓气流主要有两种驱动方式:(1)提高驱动段(高压段)气体压力P4与被驱动段(低压段)气体的压力P1之比P41,并采用变截面驱动或多段驱动,可以有效提高P41。(2)增大驱动段声速a4与被驱动段声速a1之比a41,使用加热(自由活塞驱动加热、爆轰加热和电加热等)轻气体驱动能够有效提高a41。实际运行可以综合采用上述办法,进行有效取舍。

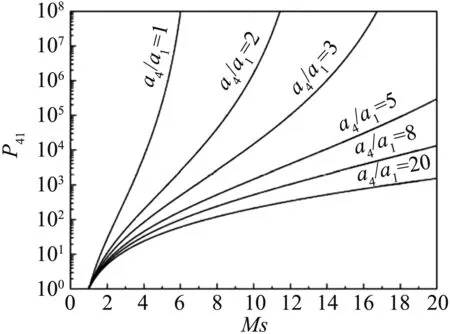
图1 激波马赫数Ms与P41和a41函数关系示意图[9]Fig.1 Shock Mach numbers Ms as function of P41 and a41 for perfect monatomic driver and diatomic gases[9]
采用轻气体和加热轻气体能够有效提高驱动气体声速。不同轻气体及加热轻气体所能实现的激波马赫数如图2所示。
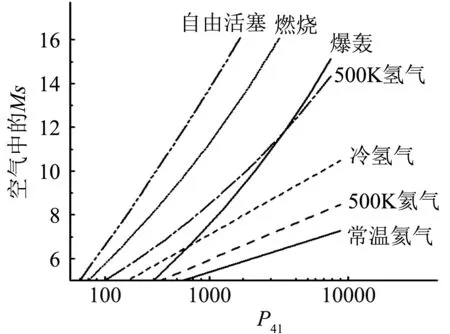
图2 不同驱动方式产生的入射激波速度对比图[6]Fig.2 Summary of primary shock speed performance for different driver options[6]
压缩加热轻气体驱动,也称为自由活塞驱动。自由活塞驱动方式最初是由R. J. Stalker[18]提出来的,故自由活塞驱动反射激波风洞亦称为Stalker管。在压缩管(驱动管)内,通过一个重活塞迅速压缩轻气体使驱动气体总温和总压迅速得到提高。澳大利亚昆士兰大学T4[20]、美国加州理工学院T5[9]、英国牛津大学T6[21]、德国宇航中心HEG[29]和UniBW Munich的HELM[22]、日本宇航中心HEK和HIEST[23]和中国航天空气动力技术研究院FD-21等高焓激波风洞采用自由活塞驱动。
爆轰驱动能够将爆轰波后的高压有效转变为有用的增压压力,通过爆轰提高驱动气体声速是个极佳的选择[6]。在爆轰驱动方法的探索中,中国科学院力学所做了出色的工作。中国科学院力学所JF-10[24]高焓激波风洞采用爆轰驱动。美国NASA兰利研究中心HYPULSE[25]和德国亚琛工业大学TH2-D[26]等高焓激波风洞采用爆轰驱动。
通过电加热器将驱动气体加热到500 K以上,相比室温驱动,电加热驱动可以使得驱动压力提高2~5倍。美国Calspan大学LENS I和LENS II[27]等高焓激波风洞将轻质驱动气体加热到672 K,以此产生强激波。俄罗斯TSMIIMASH中心U-12高焓激波风洞[22]采用电加热氢气或氦气作为驱动气体,提高喷管驻室的总焓和总压。不同驱动技术对比如表1所示,自由活塞驱动可获得最大的性能和运行灵活性,但技术风险相对复杂[18]。爆轰驱动激波风洞提供的有效试验时间长、运行成本低、扩展性好,但在性能上(喷管总焓和总压)比自由活塞驱动激波风洞低[6]。电加热驱动气体的高焓激波风洞试验状态有良好的重复性,但运行成本高,而且大量的轻质气体存储、运输、加热和排放存在诸多不安全的因素[27-28]。不同驱动方式的性能、安全和工作效益及成本不一致,选择何种驱动方式需要结合若干因素综合考虑。

表1 驱动技术对比[10]Table 1 Comparison of driver technology[10]
2 流场检测技术
高焓激波风洞产生高焓高压气体,自由来流参数的确定过程比低焓超/高超声速风洞复杂很多。一方面是试验气体的属性与量热完全气体不同,自由流中存在高振动能组元和原子离子组元。另一方面,现代光学测试技术目前无法精确测量喷管驻室条件。目前喷管驻室条件根据一维激波管理论计算获得,相应的测量参数为激波速度和喷管驻室压力。
2.1 自由来流参数的确定
高焓激波风洞自由流参数的确定和流场品质优劣决定了试验的可靠性。自由流组分的诊断需要后面要详述的流场光学诊断技术。高焓激波风洞的自由流包含高振动能组元和原子离子组元,比热比γ不是常温空气的常数。非平衡流的声速和马赫数没有简单的定义,即使对于冻结流的马赫数,也不能像完全气体那样用简单方法求得。高焓激波风洞自由来流条件需要利用数值计算与一系列的测量参数进行对比,不断迭代,如图3。对于高焓流动,风洞试验和数值模拟之间是一个相互验证、相互促进、相辅相成的过程。这一过程又验证新的测试技术和数值物理化学模型,进而能深入了解设备的性能和相应的流动机理。
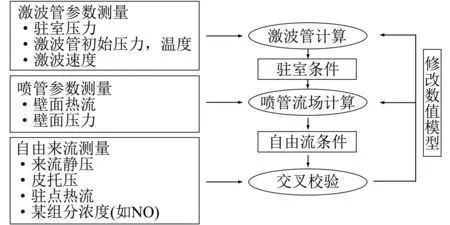
图3 高焓激波风洞自由流参数调试流程[11]Fig.3 The debugging procedure of free stream conditions in high enthalpy shock tunnel[11]
2.2 有效时间的确定
在高焓激波风洞中,驱动气体经过入射激波在激波管近壁面形成的分叉区域时,会对试验气体形成早期的污染[10,29],如图4所示。驱动气体对试验气体的早期污染会改变自由来流气体组分;并且,早期污染会减少有效试验时间,使得试验难度增加,试验精度降低。总焓越高,影响越严重。
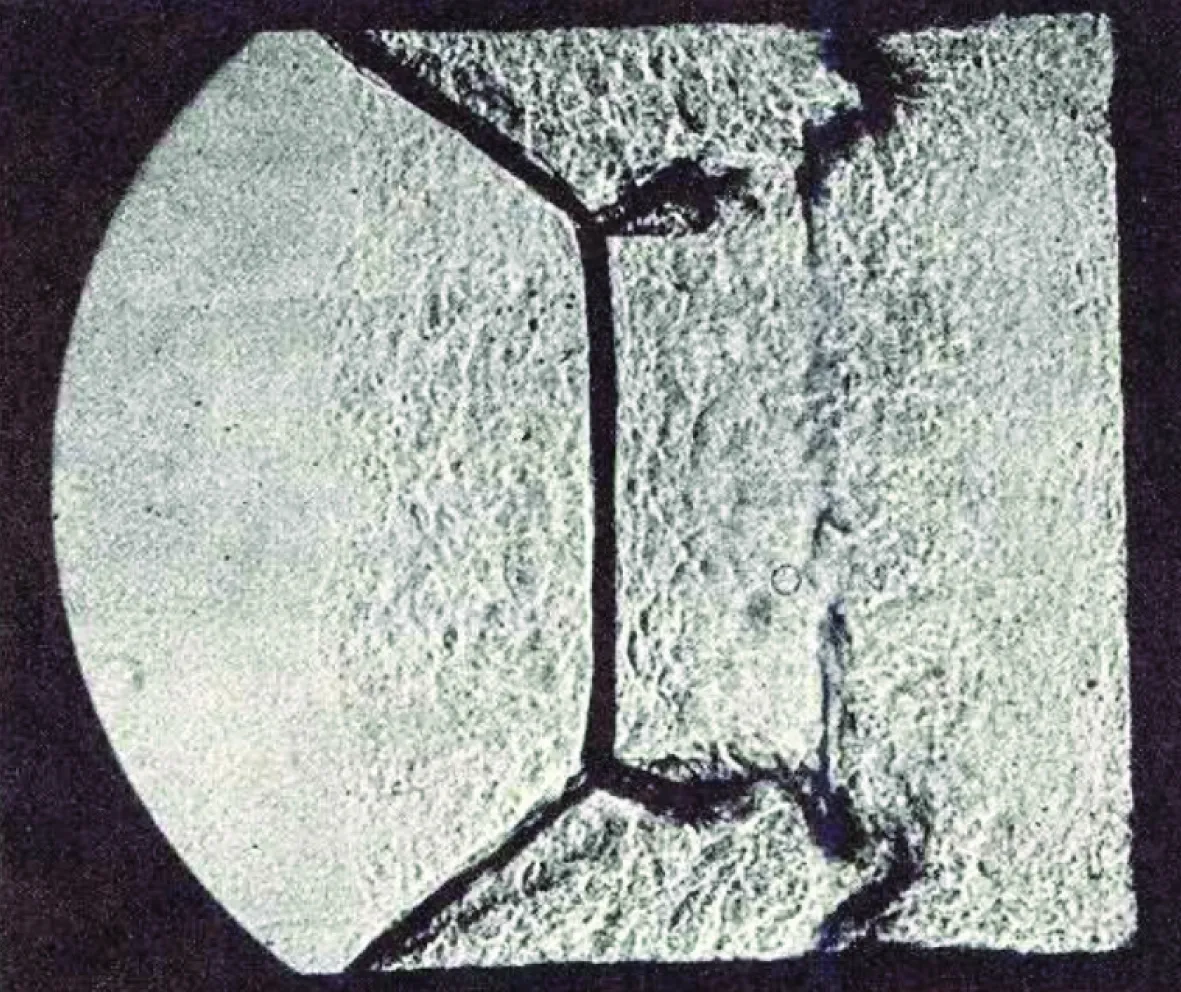
图4 反射激波与激波管边界层相互作用阴影图[10]Fig.4 Shadowgraph of the interaction of the reflected shock with the shock tube wall boundary layer, illustrating mechanism of early contamination[10]
国内外开展了很多污染对皮托压影响的实验[30-34]。例如,在HEG高焓激波风洞开展纯空气、空气加5%(质量分数)的氦气、空气加10%氦气试验,如图5所示。与测量数据的波动相比,加入氦气对皮托压曲线的影响很小。因此,通过喷管贮室压力以及试验段的皮托压力来判断有效试验时间并不合适。
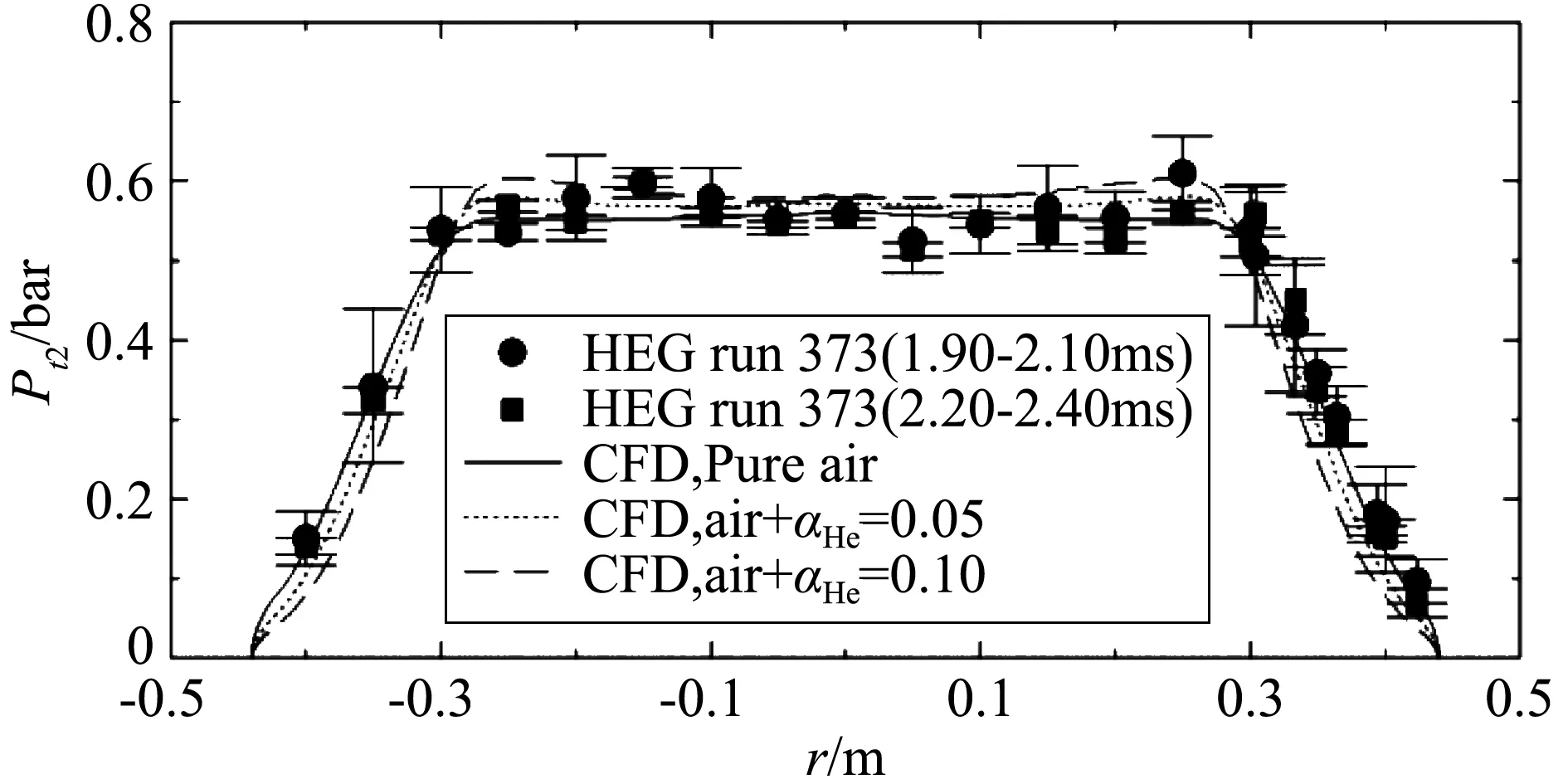
图5 喷管出口处测量和计算皮托压力对比[11]Fig.5 Comparison of measured and computed Pitot pressure profiles at the nozzle exit[11]
大多数情况下,污染现象发生在喷管贮室压力开始下降之前。然而,皮托压无法有效对污染现象进行识别,表明基本流动特性(如马赫数、总压及温度)没有受到驱动气体污染而发生明显的变化,自由流马赫数、总压和温度对驱动气体污染不敏感。相比之下,在试验段加入氦气后,静压明显减小,如图6。在纯空气和空气加氦气条件下,喷管出口处的自由流静压在不同条件运行情况变化明显[33]。
对于高焓气流,自由流静压是一个重要的参数,因为它能够表征自由流中的热化学松弛效应。采用静压探针或者平板能够测量静压[35][36]。
因此,高焓激波风洞有效时间的确定应该结合驱动气体的到达时间、总压、皮托压力和静压共同判断。
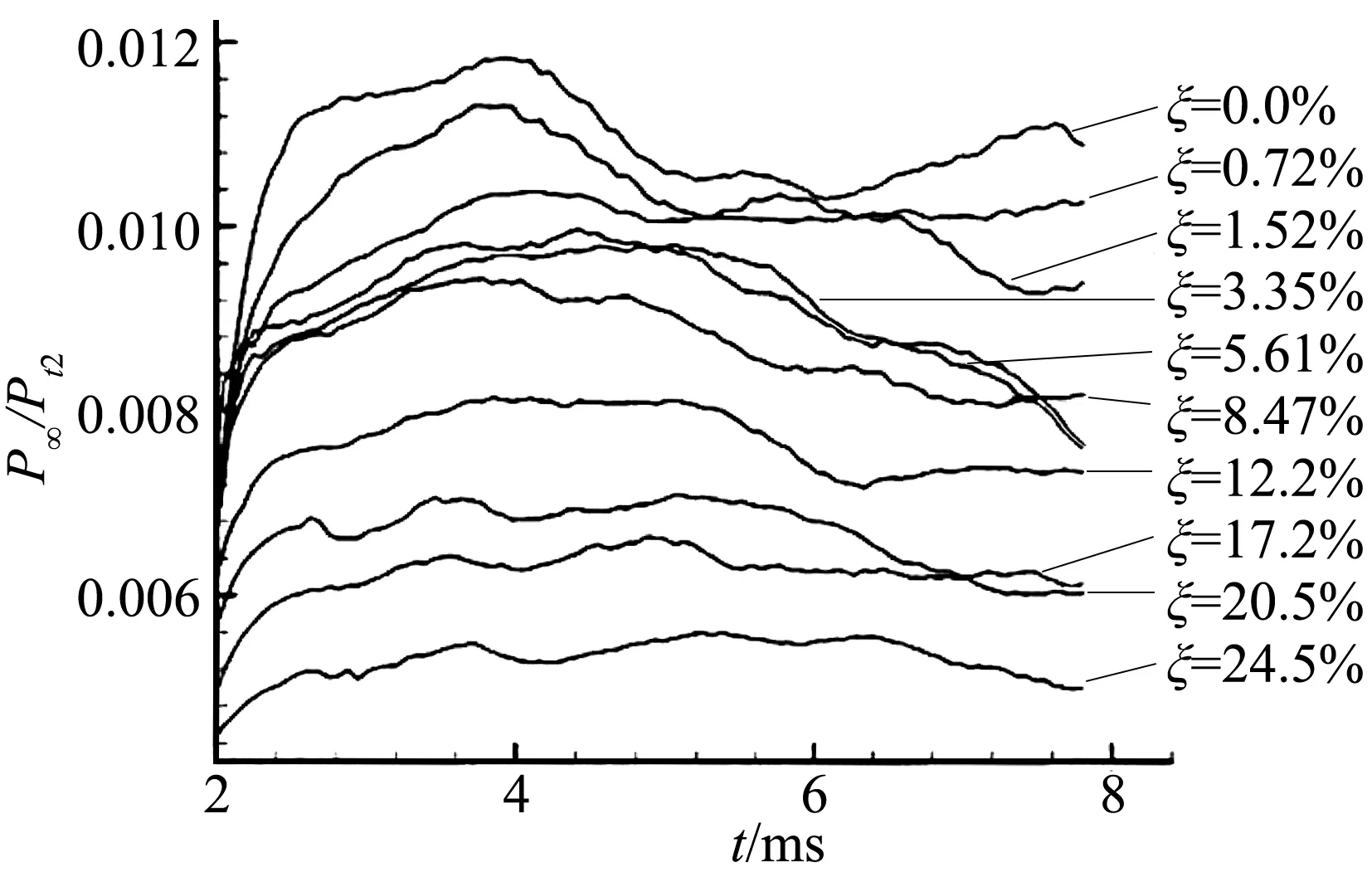
图6 不同浓度氦气 P∞/Pt2随时间变化规律[33]Fig.6 Time histories of the pressure ratio P∞/Pt2 for various helium concentrations[33]
2.3 污染气体推迟技术
高焓激波风洞依靠入射激波在激波管末端反射,产生高温高压气体,有效试验时间短。入射激波形成的边界层效应会造成大约一半的试验气体损失,驱动气体混合进一步造成余下试验时间中一半甚至更多的试验时间损失。在高滞止焓(>10 MJ/kg)情况下,反射激波与边界层干扰变得特别严重,污染使得试验时间甚至小于1ms[37-38]。
Hornung等[9]指出,要进行风洞定常流场试验,气流持续时间τ要满足以下关系
其中,L为模型长度,V∞为自由来流速度。这样流动干扰区域才能充分发展。
对于大尺寸高焓激波风洞,模型尺寸较大,为了提高试验时间,必须减缓早期驱动气体的污染。加州理工学院T5风洞在激波管末端加一个套筒,结果显示能有效减缓早期驱动气体污染[39]。该装置的原理是沿激波管上游壁面,在喷射的驱动气体与试验气体混合之前对其进行捕捉[40],如图7。

图7 驱动气体抽吸装置示意图[37]Fig.7 Schematic of a device for capturing driver gas[37]
一般而言,为了增加流动时间,高焓激波风洞会增加类似的边界层抽吸装置。如德国宇航中心HEG[30]增加抽吸装置后,有效时间增加了0.8 ms。日本航空航天实验室Norikazu Sudan等人对HIEST[17]开展大量的关于推迟污染的研究。
3 测试技术
高焓激波风洞测试技术是指在高焓激波风洞试验中涉及的测试技术。高焓激波风洞试验,不仅要能模拟动力相似准则,如马赫数、雷诺数,还要能模拟真实飞行的气流总焓和比热比等[9,11]。高焓激波风洞主要测试技术如表2所示。

表2 高焓激波风洞相关实验测试技术Table 2 The testing technology of high enthalpy shock tunnel
3.1 气动热与压力测量
高焓激波风洞试验试验段气流总温和总压高,试验时间短,模型承受极高的热载荷和压力。这就要求热流传感器响应频率高、灵敏度高、抗干扰能力强、抗冲刷能力强。常规激波风洞使用的测热传感器是薄膜铂电阻温度计,其最大热流不超过3 MW/m2[41],不适合在恶劣环境下测量高热流。在严苛的热流和来流环境下,通常使用同轴热电偶[42],其适用热流范围是20 kW/m2~20 MW/m2,响应频率高于100 kHz,测量精度优于8%。同轴热电偶技术为点测量技术,测量时与模型外表面垂直,外径为0.6 mm~1.5 mm。
温敏漆技术(TSP)是一种大面积测热技术,利用温敏材料的发光特性随温度的变化而变化的特点进行模型表面温度测量的光学测量技术。图8给出了通用的温敏漆发光热图测热系统示意图。目前温敏漆技术已在高焓激波风洞中得到了应用[43],其测量精度优于7%,响应时间小于 0.1 ms。Hubner[44-45]在LENS-I风洞中应用TSP技术进行了椭圆形尖锥模型热环境试验,研究了不同马赫数和雷诺数下模型表面激波/边界层、激波/激波干扰现象,温敏漆测量结果和传感器测量结果相当吻合。
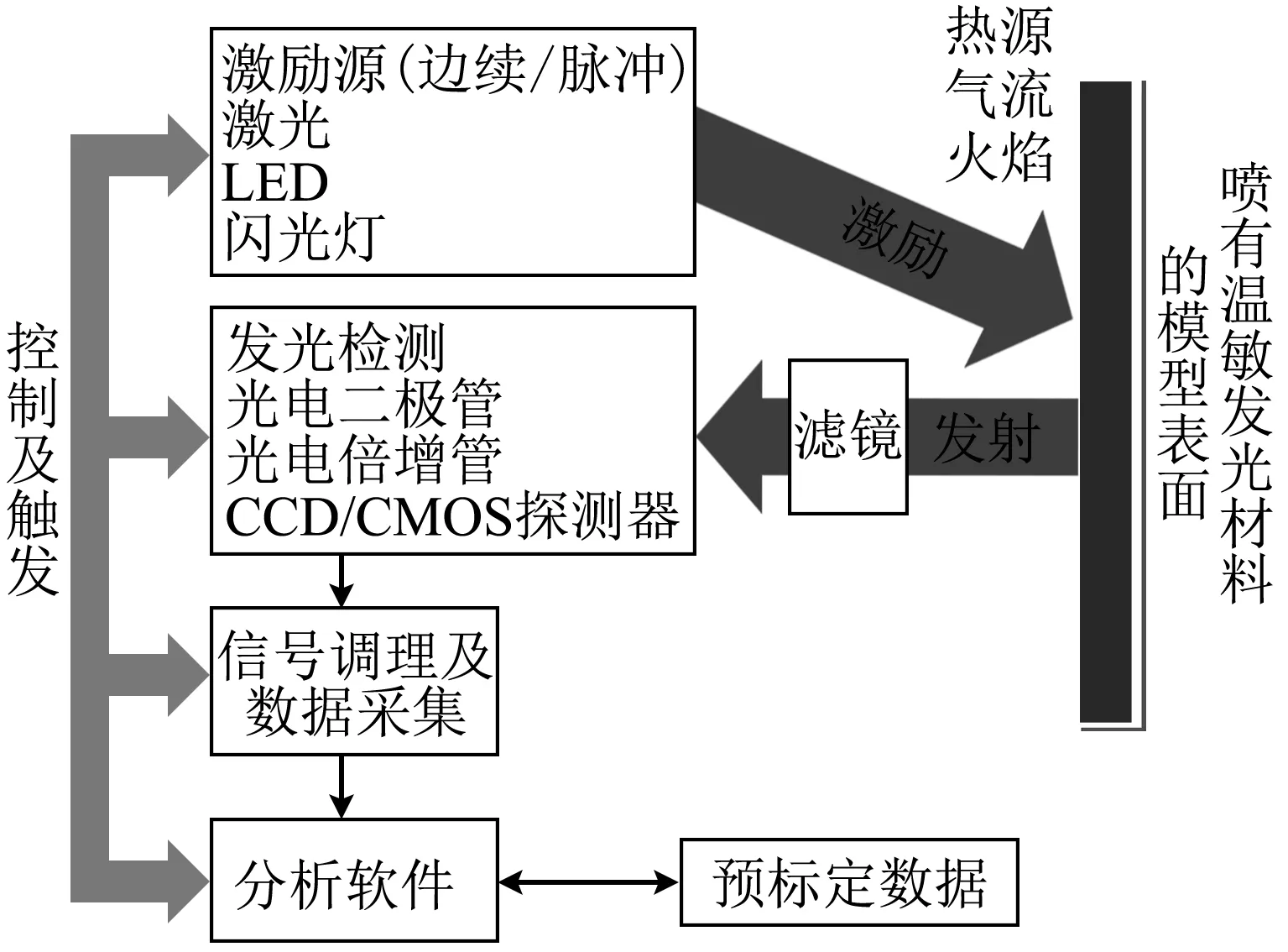
图8 温敏发光热图系统示意图[43]Fig.8 Schematic illustration of TSP system[43]
磷光热图技术根据磷光材料的温敏特性测量热流,其基本原理是应用具有特殊发光性质的稀土元素作为发光材料,该类材料受一定强度的紫外光源照射后,原子内的电子由基态转为激发态并发出一定波长的可见光。磷光热图技术不仅可以对复杂外形模型进行非接触热环境测量,而且还可以通过一次试验获得模型全场热环境数据。风洞磷光热图系统简图如9所示。目前,中国航天空气动力技术研究院的毕志献等研究团队[46]正在对高焓环境的高温磷光热图技术开展研究,已取得初步成果。
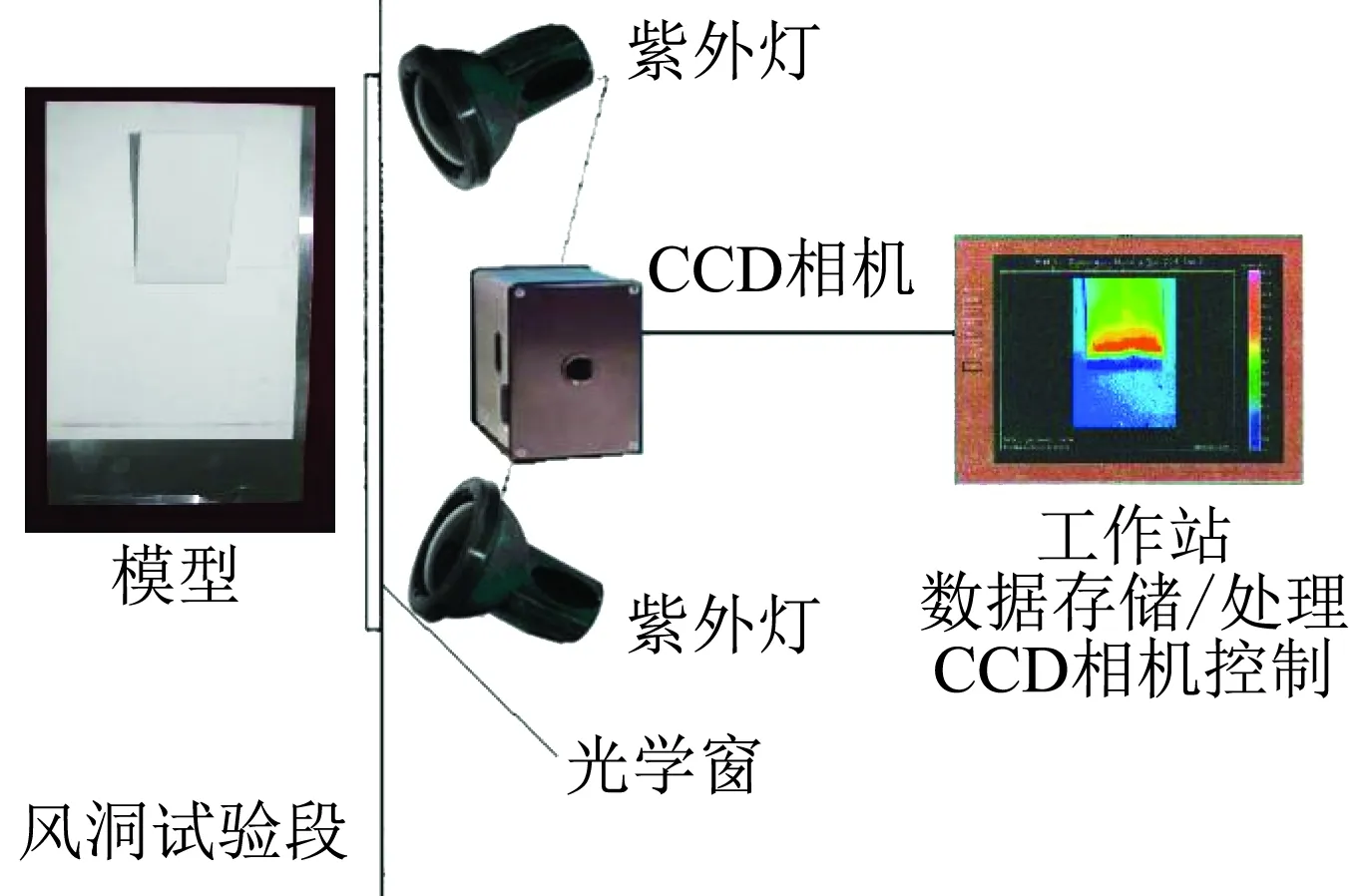
图9 磷光热图测热系统图[46]Fig.9 Phosphor thermography system[46]
进行压力测量时,由于高焓激波风洞自由来流总温高,对于压阻式传感器必须有热防护措施,同时又不能过分降低测量的时间响应。因此压力传感器在结构上引入新的特点,一般有以下措施[47]:(1) 设置抗击屏以避免高温气体直接冲击敏感元件;(2) 气流压力经过必要的转折加载到施压腔体;(3)在真空条件下用适当的防护液灌满传感器,它同时起到热防护和传感器载荷的作用。
3.2 气动力测量
高焓激波风洞提供的试验时间一般为几个毫秒的量级,使得应用常规天平技术开展气动力研究是一个严峻的挑战。
摩阻天平作为一种具有加速度和法向压力补偿的单分量天平,在LENS高焓激波风洞成功应用[48]。在模型表面安装毫米量级大小的型面膜片,如图10,气流通过膜片产生的剪切力会施加到两片压电陶瓷上,进而产生一个与膜片上剪切力大小成比例的电荷,结合模型表面真实压电片上的信号和虚拟压电片上的信号测量了加速度和补偿量,摩阻天平通过橡胶块减小风洞运行时产生的强大气流冲击作用,摩阻天平的测量精度优于8%。
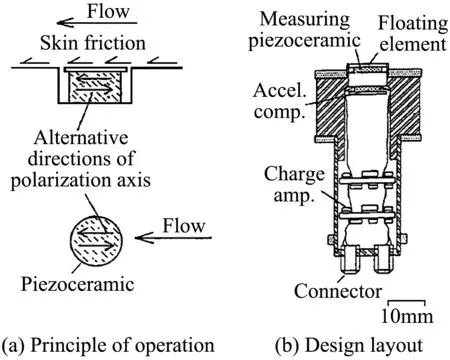
图10 摩阻天平[49]Fig.10 Skin friction balance[49]
在HIEST风洞利用加速度计开展模型测力试验[50],模型为总长0.49 m的HB-2标准模型,质量为10.88 kg,如图11。试验结果显示,目前的测量技术能保证时间反应在亚ms级别,不会引起高频率杂乱的噪声。同时,也利用加速度计开展超燃发动机测力试验[51],试验结果精度符合预期。
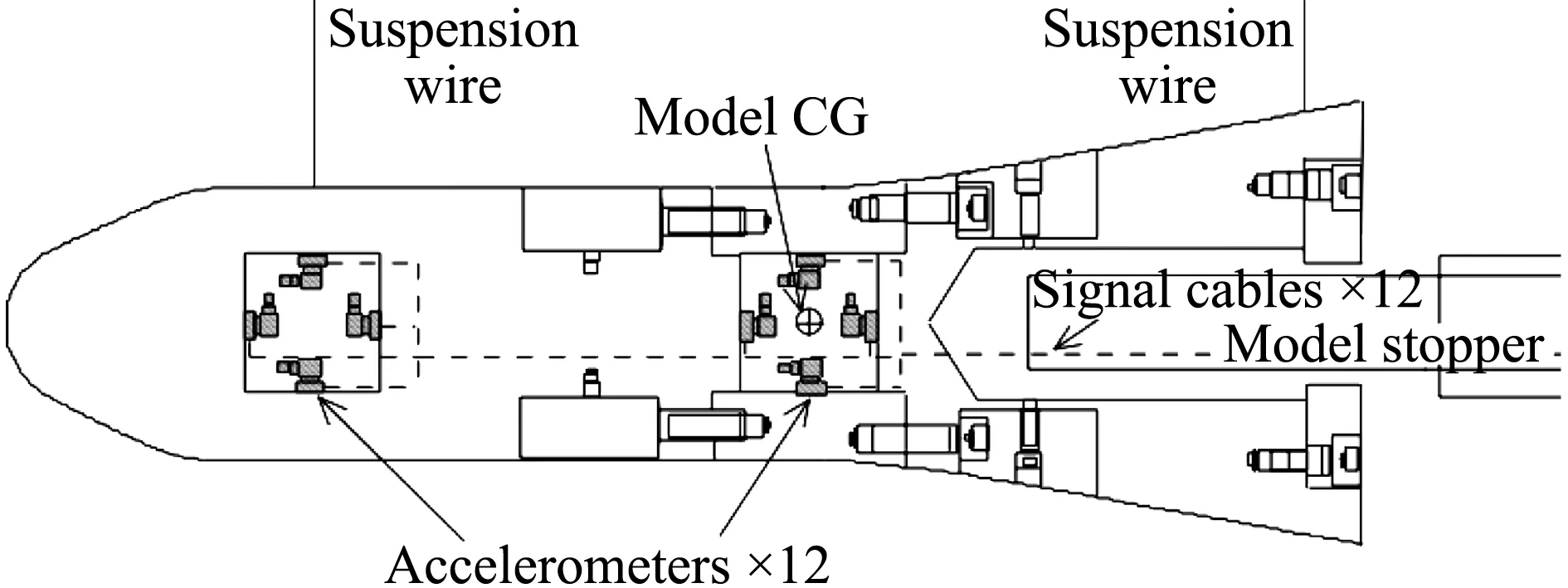
图11 HB-2模型示意图[50]Fig.11 Schematic of the HB-2 standard mode[50]
在高焓激波风洞中可采用具有加速度补偿的2分量到6分量天平来测量气动力,这些测力天平包括标准天平(应变或压电)或者与推进系统结合的特殊天平[52],如应力波天平[53],其具有响应快、跟随性好、对模型的适应能力强等特点。目前国外已经成功将其应用于超燃冲压发动机[53]、火星探测器[6]等复杂的高超声速飞行器模型多分量测力风洞试验中。
3.3 高速纹影
为了能够记录高焓激波风洞的流场建立、稳定及衰减的整个试验过程的时间序列,高速纹影系统的光源的脉冲频率要高。LENS[6]和HEG[11]高焓激波风洞的纹影系统(如图12)采用Oxford Lasers生产的LS-20-50型铜蒸汽脉冲激光,LS-20-50型的脉冲频率为50 kHz。 激光束光强很高,可以切最大刀口而不用担心减弱图像亮度。基于数字相机的优良效果与激光器突出性能,在密度很低的条件下也能获得高质量的纹影图像。
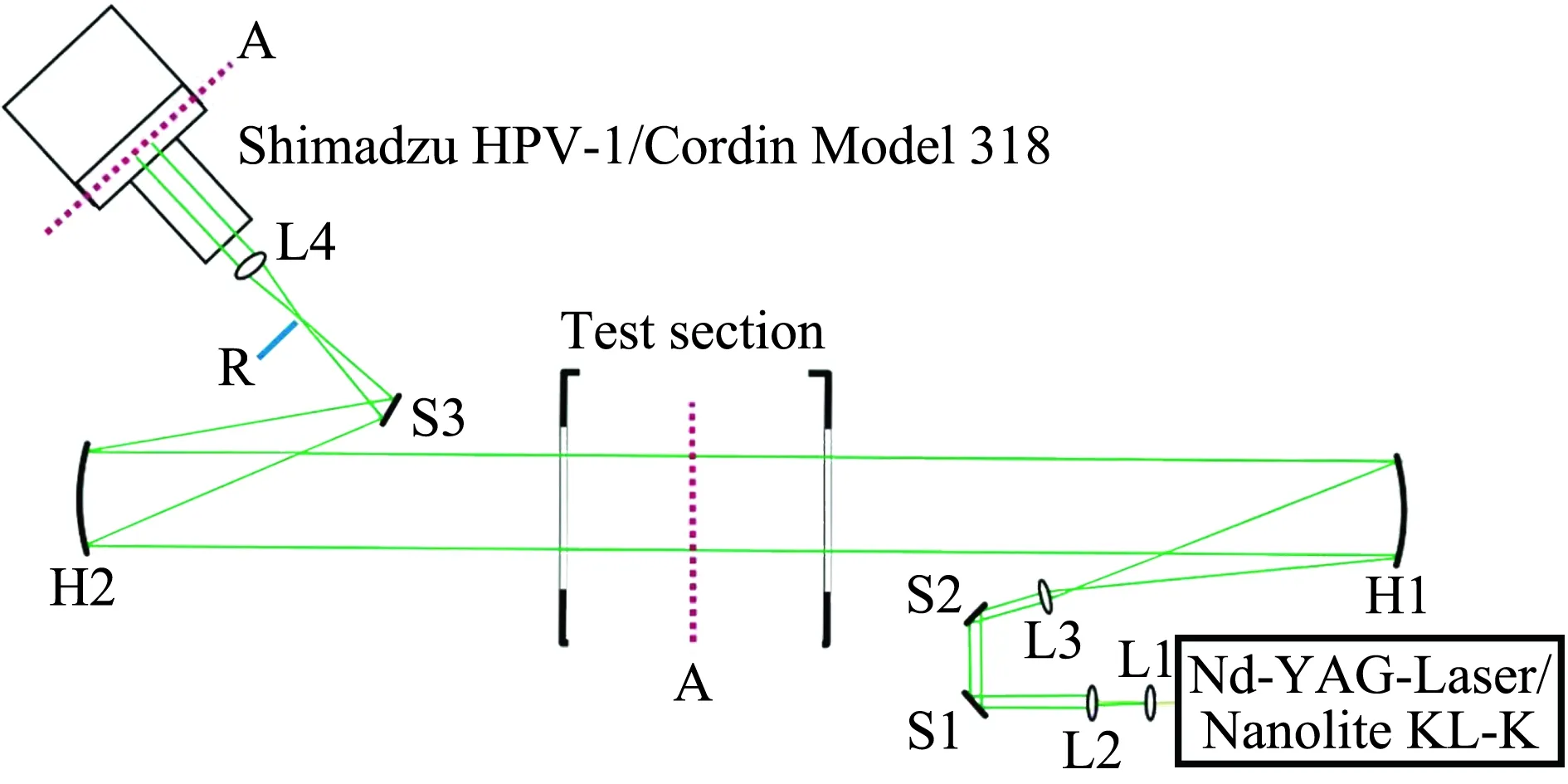
(H: Parabolic mirrors, S: Plane mirrors, L: Lenses, A: Focal plane, R: Razor blade)
激光器发射的波长较短时,比如波长为510.6 nm的绿光和578.2 nm的黄光,在测量有强激波的流场时,由于激波下游高温高密度流场吸收激光束,铜蒸汽激光会无法透过激光下游的流场区域。为了避免被吸收,可以通过染色激光器驱动铜蒸汽激光器将波长调整到671 nm。
3.4 流场诊断技术
高焓激波风洞试验段的来流条件的获取,需要有效获得喷管出口自由来流气体的属性。
传统接触式测量手段由于响应频率低并对流场造成干扰,使得在高焓激波风洞流场监测中存在一定的局限性。而非接触式光学测量技术具有灵敏度高、非接触与时空分辨率高等优点,被广泛应用于流场诊断和气体组分浓度测量。目前,用于高焓激波风洞测量的光谱技术主要有激光诱导荧光技术(PLIF),可调谐激光二极管吸收光谱技术(TDLAS)技术与相干反斯托克斯喇曼散射技术(CARS)。
PLIF是20世纪80年代初发展起来的一种激光光谱诊断技术[55]。PLIF利用流场中特定物质在激光照射下能发生荧光的特点,根据流场速度、温度、压力组分浓度等决定荧光信号的强度及其光谱分布轮廓的规律,结合不同的测量方案和适当的数据处理方法,将这些流场参数从荧光信号中提取出来,能够实现二维或三维成像,并达到流场参数测量的目的。
图13为 PLIF 测量系统示意图。流场中标记粒子可以是燃烧流场中特定的分子或自由基(如CO2、NO、煤油、OH 等),也可以是加入的示踪剂。由于PLIF具有非接触、高时空分辨率的特点以及多点、多参数同时测量的优势,广泛用于流场显示和定量测量,如温度、浓度、速度和压力等,特别是在标记化学反应区和组分扩散、混合等研究中。在燃烧诊断、湍流结构研究、流动显示等领域发展迅速,尤其是在风洞流场诊断方面,以电弧风洞、高焓激波风洞、弹道靶等高焓试验设备为代表,开展了大量的研究和应用工作[56]。然而目前发现的荧光物质气体种类较少,使得该技术在组分浓度测量上并不具备优势。

图13 PLIF测量系统示意图[57]Fig.13 Schematic of testing system[57]
TDLAS是自20世纪80年代末发展起来利用激光能量被分子“选频”吸收形成吸收光谱的原理来测量气体浓度的新型光谱诊断技术[58]。激光穿过待测气体时,若激光频率(波长)与气体某个吸收谱线中心频率相同时,气体分子(原子)会吸收光子而发生能级跃迁,使得激光束的能量衰减。当调谐激光器,用窄线宽的激光在波长上反复扫描谱线区域,对穿越待测气体的激光功率进行测量即可测得气体分子的谱线信息。
由于TDLAS技术灵敏度高、结构相对简单以及成本低廉,近些年来已经广泛用于痕量气体探测、环境监测以及瓦斯探测、风洞流场诊断方面等领域[58]。TDLAS技术能实现不同气体组分浓度(包括CO2、CO、H2O、HF、CH4等)和温度场测量,以及流场速度和质量流量的测量[60],见图14。然而,传统TDLAS技术是对光路上吸收气体进行一维路径积分的视线测量,反映的是整个光路中光强因气体吸收而减少的总量。使用单一的TDLAS系统只能检测一条路径上气体浓度、温度参数的平均情况,无法满足复杂流场特性的诊断需求。

图14 TDLAS用于气体温度和组分浓度测量原理图[58]Fig.14 Schematic of measurement air temperature and component concentration based on TDLAS[58]
CARS是20世纪60年代末发展起来的光谱诊断技术[61]。激光穿透气体时,气体分子产生新散射谱线(喇曼光谱)。CARS技术利用两束不同频率分别为ω1和ω2的强单色激光同时入射到待测介质中,当两束激光频率差等于待测介质某一喇曼散射的频移值时,则在介质内能有效激励起与光频声子受激励振动相联系的相干极化波,后者再与第三束作为探测用频率为ω3的入射光相互作用,而产生第四束频率为ω4的相干信号束。利用激光脉冲技术,可以得到极高的时间分辨率,能够测量流场组分浓度、温度、速度等参数及其瞬态的流动过程[61]。
CARS(图15)可用来探测一些复杂的环境,诸如火焰、爆炸和等离子体[62-63]。但CARS对光路的调节要求较高,同时流场中温度、浓度的变化都会导致信号强度的急剧变化,甚至消失。另外该技术的不足之处还具有较强的背景荧光。
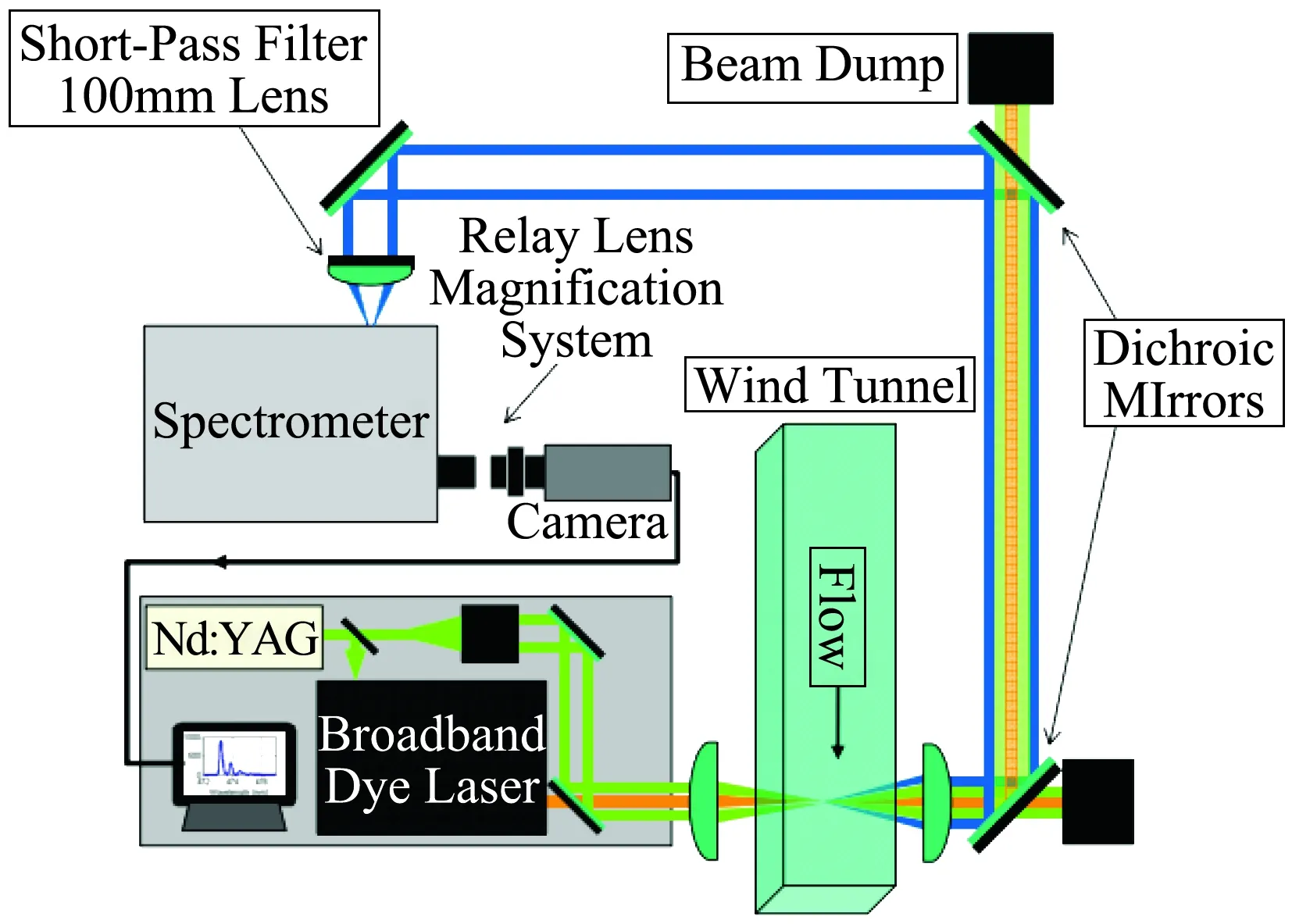
图15 CARS试验测量系统[64]Fig.15 Experimental schematic of CARS diagram[64]
4 特种试验技术
高焓激波风洞能够复现高超声速飞行环境, 试验数据库能很好地与飞行关联,使其能开展一系列特种试验。
4.1 超燃冲压发动机试验技术
超燃冲压发动机[65]利用飞行器头部诱导的斜激波和飞行器前体压缩空气来流,使其以超声速进入燃烧室,在超声速流动条件下组织燃烧,能够很好的解决常规吸气式发动机技术瓶颈。其比冲高,具备高超声速巡航能力,是高超声速巡航导弹、高超声速飞机、空间作战飞行器以及未来低成本可重复使用天地往返运输系统等高超声速飞行器的重要动力装置之一。
从最初的概念提出到近年来美国X-43A、X-51A的相继试飞,超燃冲压发动机设计工具和技术的研发一直都依赖于风洞试验[66],试验关键技术是模拟超燃冲压发动机的工作情况环境、以使地面试验数据库能很好地与飞行关联。高焓激波风洞通过强入射激波压缩被驱动段内的试验气体,可复现高超声速条件下的速度、压力和温度条件,能够满足发动机试验需求[6]。
高焓激波风洞有效时间为毫秒量级,给燃烧组织及推力测量等带来很大的挑战。在T4[67]和HIEST[68]等高焓激波风洞超燃发动机试验研究中,油气混合和燃烧反应是稳定燃烧过程中特别关注的问题,图16为在T4风洞开展的超燃发动机点火试验示意图。针对发动机推阻特性评估需求,利用多分量应力波天平可测量发动机冷热态下的升力、推力、俯仰力矩等气动数据[69]。HYPLUSE风洞利用TDLAS技术,诊断超燃冲压发动机的燃烧场,获得了燃烧室气流的平均温度[70]。
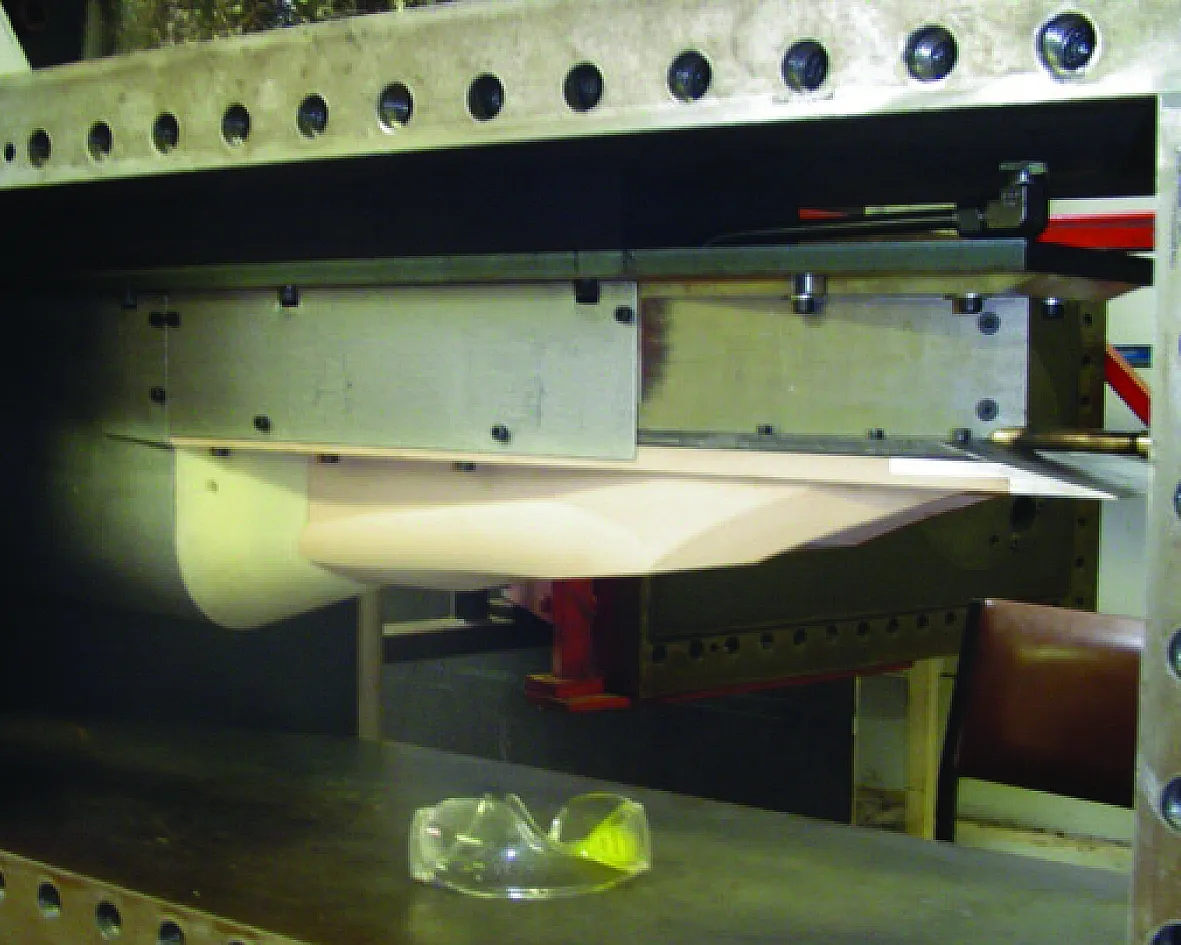
图16 T4风洞的HyShot-II模型[67]Fig.16 The model of HyShot-II in T4[67]
在超燃冲压发动机点火试验中,主要有氢燃料和煤油[64]。氢燃料点火延滞时间极短,风洞有效试验时间几个毫秒即可开展超燃冲压发动机试验,因此大多数在高焓激波风洞中进行的超燃冲压发动机试验都是氢燃料。对于煤油燃料、飞行马赫数小于7条件下的发动机性能试验(气流总温小于2100K),由于煤油自发点火的延滞时间比氢燃料要长得多,风洞要提供较长的试验时间才能满足要求。因此有关煤油等碳氢燃料超燃冲压发动机高焓激波风洞的试验较少,但X-51A的LEN II风洞试验表明试验时间50 ms以上的脉冲风洞也可开展以煤油为燃料的超燃冲压发动机试验[71]。
4.2 级间分离试验技术
多级飞行器设计、发展和测试要求其每个过程最优化,需研究发生在分离体和每个部件非定常激波间的相互作用。复杂的激波系和激波与边界层相互作用导致在不同部件间有不同压力和热载荷,其过程数值模拟异常复杂,需要开展地面试验。
为了精确预测级间分离的非定常载荷和时间过程,“自由飞”动力抛壳和多体分离的试验需要复现飞行环境,并能实现安全全尺寸飞行[72-74]。这就要求风洞起动过程快速并且平稳,当级间分离和多部件分离完成后,流动要突然终止。
LENS风洞开展的多级飞行器动力分离非定常气动热环境研究试验,能实现分离部件“自由飞”[72]。为了启动和终止通过喷管的流动,发展高速阀系统使得“自由飞”物体动能最小化,使其能够捕捉到这些物体。建立回收驱动系统和高速释放机制,能够快速、“干净”释放多部件模形。对风洞设备进行一些重要的改进,使得风洞运行时间超过100 ms,风洞壁面安装“装甲”,建造模型捕捉系统限制模型分离后模型的运动,防止模型部件对风洞的破坏,如图17。这个设备已经成功用到高速拦截器探头罩的抛壳。在完全复现飞行条件下,检测全尺寸二级抛射“阻力分离”。
(a) (b)
4.3 电磁散射测量技术
高超声速飞行器进入大气层,与周围气体摩擦使其离解甚至电离,从而在飞行器周围形成一个由离子和电子组成的等离子鞘。一定浓度的等离子体能够吸收、折射或反射电磁波,进而影响飞行器天线辐射和整体的电磁散射特性,对飞行器的通信、定位造成困难,甚至导致通信黑障[73]。
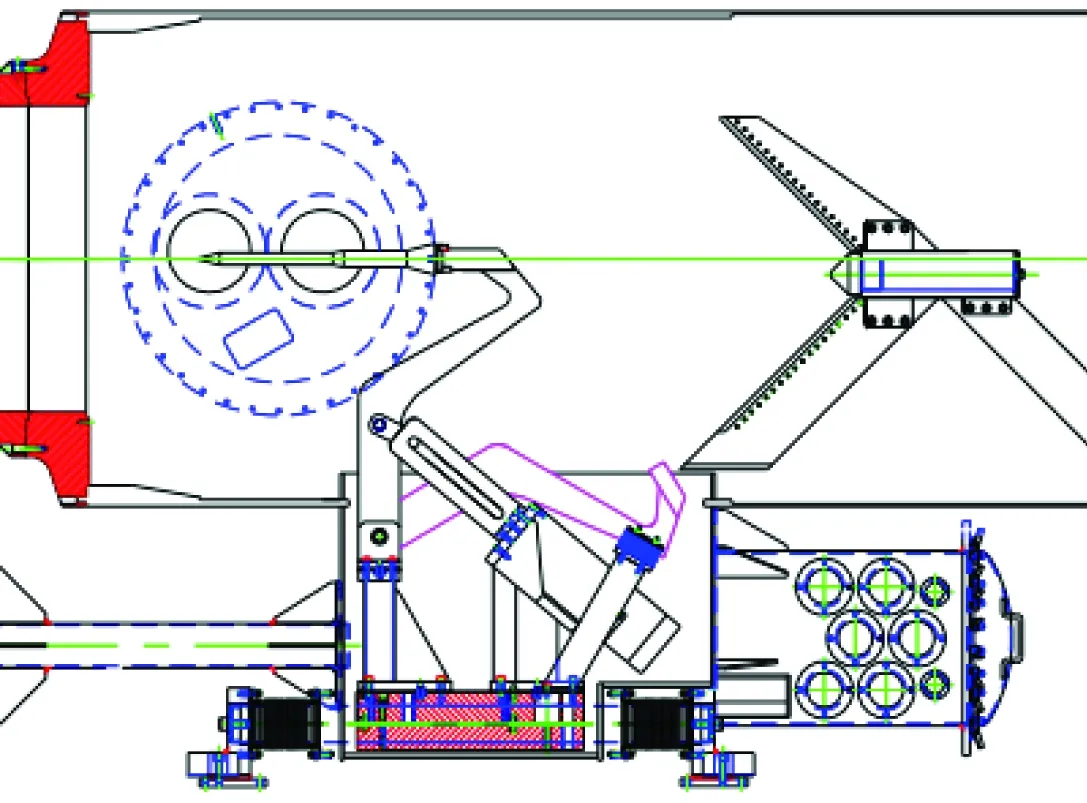
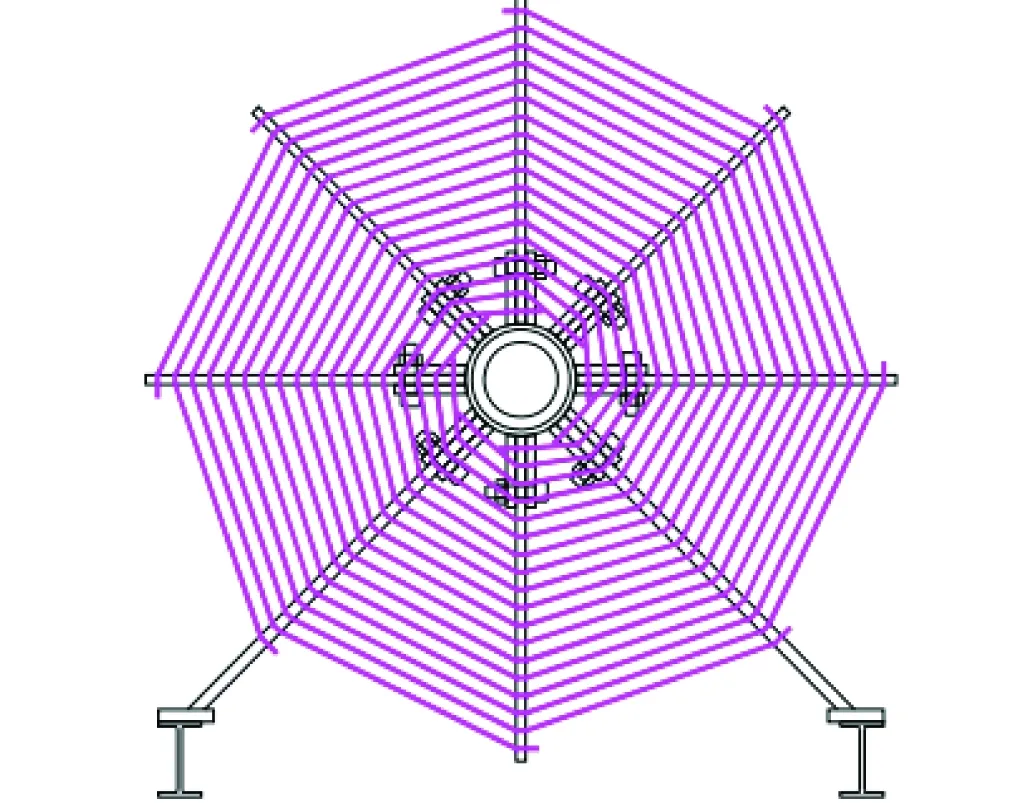
高焓激波风洞能够复现飞行环境,可以开展电磁散射方面的研究,LENS[74]和JF-10[75]高焓激波风洞已经开展此方面的试验。试验测量装置如图18所示,风洞启动后,高速气流沿风洞轴向推进至目标,经一系列化学反应在目标周围产生等离子鞘。利用矢量网络仪的步进扫描体制,在C波段进行试验,观察等离子鞘对目标雷达散射截面的影响。此实验装置观测到等离子鞘套对目标雷达散射截面(RCS)的减缩作用,目标散射测量值中直接体现激波风洞的高速气流状态信息,并直接地观察到气流状态对目标散射回波的影响[72]。
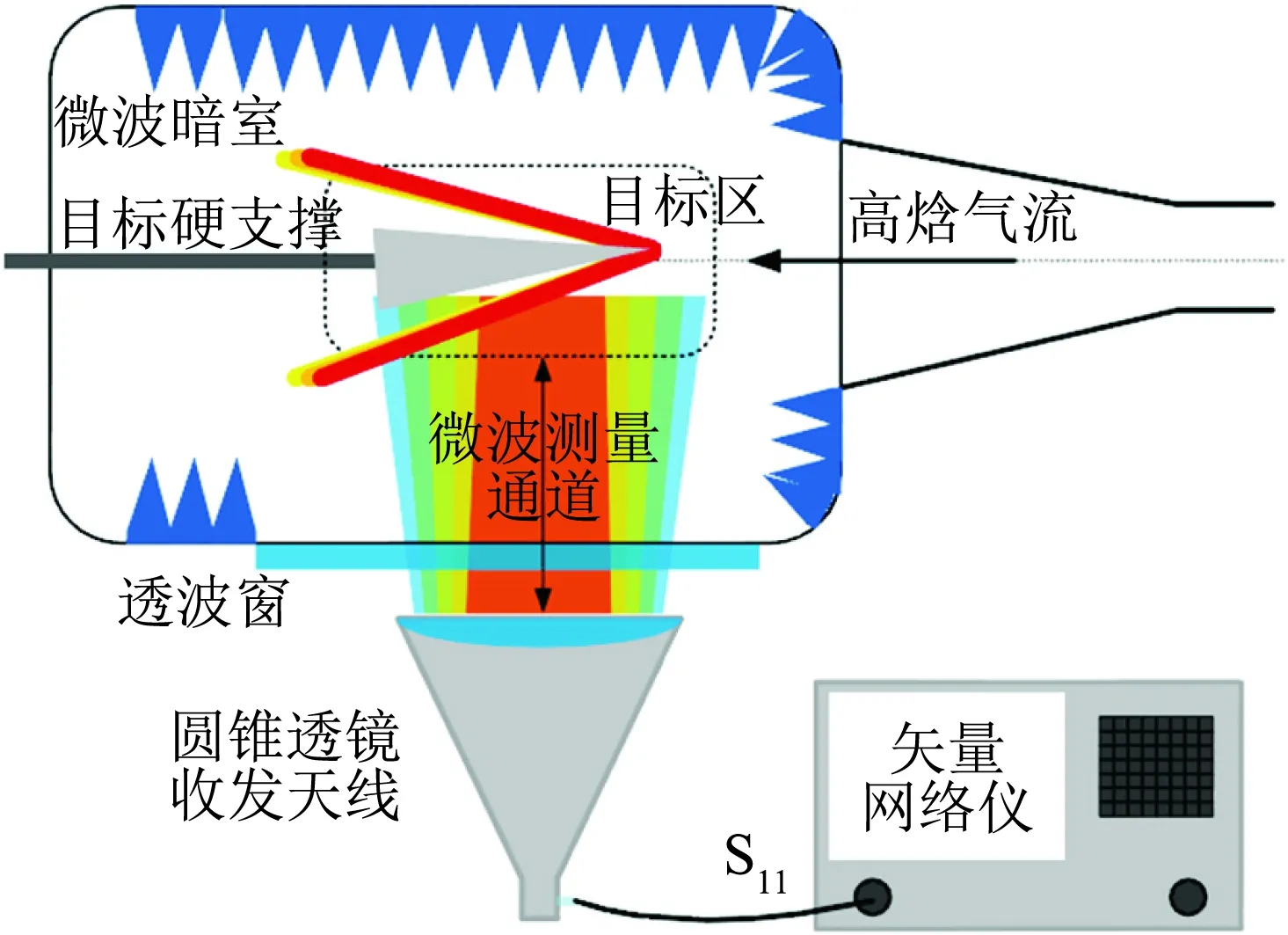
图18 JF-10风洞内目标电磁散射测量示意图[72]Fig.18 The configurations of the backscattering measurement in the JF-10 shock tunnel[72]
5 结 论
高焓激波风洞能够模拟来流速度(比焓)和双尺度参数ρL(ρ为密度,L为特征长度),能够模拟飞行条件下飞行器的气动热、气动力、气动光学以及推进系统的性能,总结如下:
1) 高性能驱动技术主要有:变截面驱动和加热(电加热、爆轰加热、自由活塞压缩加热)轻气体驱动。为了获得更佳的驱动效果,一般变截面驱动和加热轻质气体驱动相结合。
2) 高焓激波风洞喷管驻室压力和总焓高,激波管末端和喉道等内流道产生烧蚀并对流场带来污染,和在高温条件下气体分子发生离解甚至电离,从而使试验结果分析较困难。对自由来流参数的确定,需要结合传统的测量方法、发展新的光学测试技术和计算流体力学加以解决。
3) 高焓激波风洞流场利用光学手段进行流场诊断,主要有 PLIF技术,TDLAS技术与CARS技术。PLIF技术可以利用不同组分对激光激发的选择性实现组分识别及浓度测量。然而目前发现的荧光物质气体种类较少,使得该技术在组分浓度测量上并不具备优势。TDLAS技术有效地抑制干扰和噪声,提取有用的光谱信号,适合伴有强烈振动的激波管和激波风洞。但单一的TDLAS系统只能检测一条路径上气体浓度、温度参数的平均情况,无法满足复杂流场特性的诊断需求。CARS可鉴别探测域中物质的种类及温度,甚至是其量子态,适合微量检测。但CARS对光路的调节要求较高,同时流场中温度、浓度的变化都会导致信号强度的急剧变化,甚至消失。
4) 高焓激波风洞能够复现高超声速飞行环境,不仅能够开展存在高温真实气体效应的超高声速条件下气动力、气动热等试验,并且可以开展超燃冲压发动机点火燃烧、级间分离和电磁散射等试验研究。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01 06:29:48
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
航空学报(2020年8期)2020-09-10 03:25:34
小哥白尼(野生动物)(2020年3期)2020-07-27 01:54:04
航空发动机(2020年3期)2020-07-24 09:03:16
数学大王·中高年级(2018年11期)2018-12-17 08:13:54
测控技术(2018年10期)2018-11-25 09:35:58
实验流体力学(2018年3期)2018-10-10 03:10:12
小哥白尼(趣味科学)(2018年5期)2018-06-21 06:24:32
北京航空航天大学学报(2017年8期)2017-12-20 08:04:50