
倒立摆系统的建模与控制研究
2018-09-27 20:34吴振远郭艳颖
科技传播 2018年17期
吴振远 郭艳颖
摘 要 从建模与控制的角度出发,以小车式二级倒立摆为例,介绍了动力学建模方法;介绍了传统控制理论、智能控制理论在倒立摆控制中的应用,描述了它们的原理和方法,分析了存在的问题和不足;最后阐述了倒立摆控制的主要研究内容和发展方向。
关键词 倒立摆;建模;动力学;控制策略;智能控制
中图分类号 TP3 文献标识码 A 文章编号 1674-6708(2018)218-0131-04
倒立摆系统是典型的多變量、高阶次,非线性、强耦合、自然不稳定系统。倒立摆系统的稳定控制是控制理论中的典型问题,在倒立摆的控制过程中能有效反映控制理论中的许多关键问题,如非线性问题、鲁棒性问题、随动问题、镇定、跟踪问题等。因此倒立摆系统作为控制理论教学与科研中典型的物理模型,常被用来检验新的控制理论和算法的正确性及其在实际应用中的有效性。从20世纪60年代开始,各国的专家学者对倒立摆系统进行了不懈的研究和探索[1-3]。
要设计倒立摆系统的控制器,首先要做的就是建立倒立摆系统的数学模型,分析动力学方法是主要的建模方法,本文以小车式二级倒立摆为例,介绍了这种动力学建模方法,对传统控制理论、智能控制理论在倒立摆控制中的应用与发展以及存在的问题和不足,进行详细的分析介绍。
1 倒立摆系统数学模型的建立
倒立摆是一个典型的动力学系统,我们采用分析动力学方法,选择最常见的水平轨道小车式二级倒立摆为例来介绍倒立摆系统模型的建立。
1.1 倒立摆系统描述及建模假设
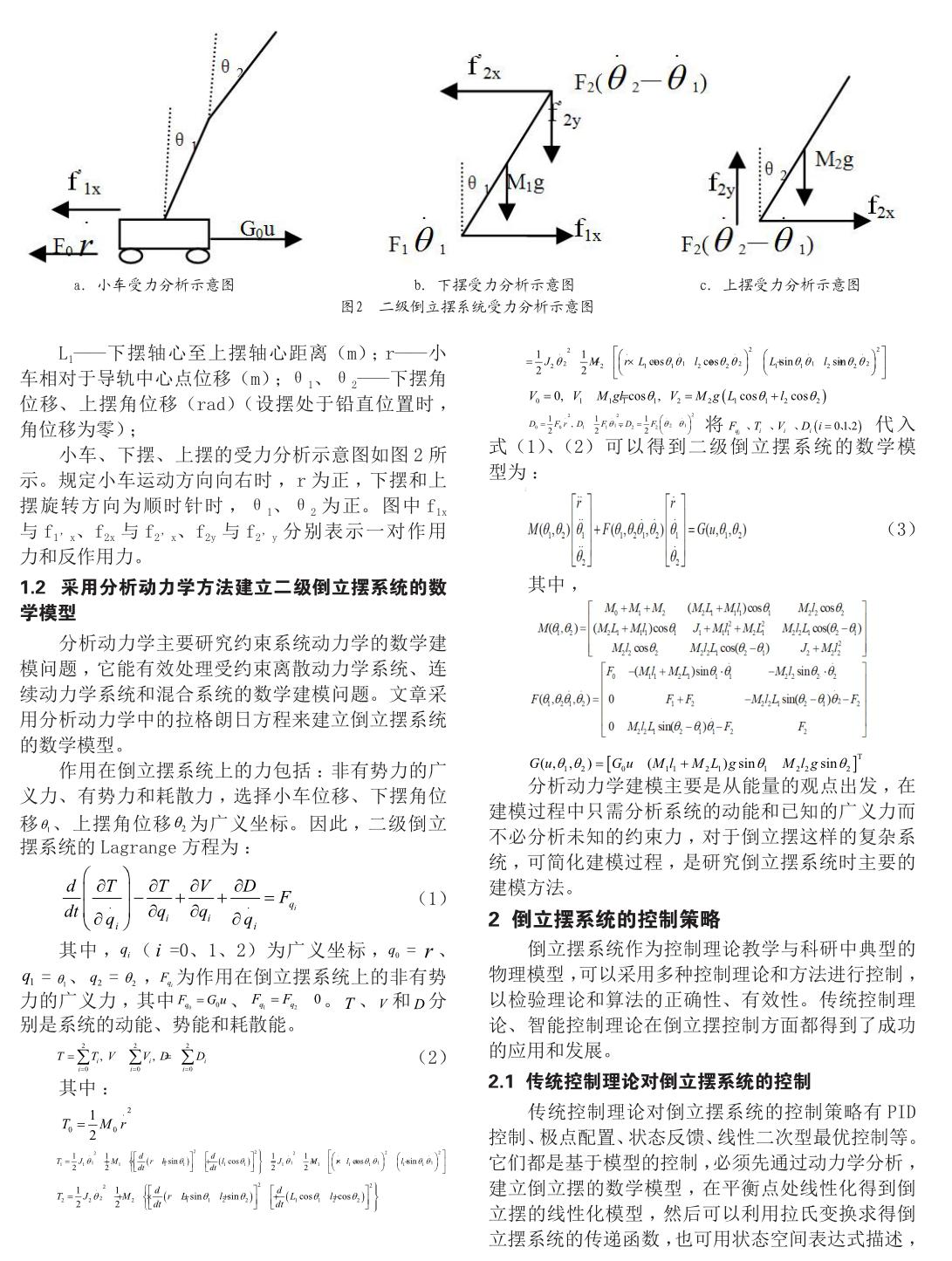
水平轨道小车式二级倒立摆系统的结构如图1所示。它主要由小车、摆杆、传感器、直流力矩伺服电机、导轨、同步传动带、皮带轮组成。直流力矩伺服电机通过传动带和皮带轮驱动小车,小车在光滑导轨上作往复直线运动。下摆铰接在小车上,上摆下摆也是铰接相连,从而两个摆可在与导轨平行的竖直平面内自由转动。传感器1、2、3分别检测小车相对于轨道中心点的线位移、下摆与铅锤线之间的角位移以及上摆与下摆之间的相对角位移。小车在直流力矩伺服电机的驱动下根据摆角变化在导轨上往复运动,使二级倒立摆在不稳定平衡点处保持稳定。文章所述二级倒立摆系统数学模型的建立是基于以下假设:1)上、下摆摆杆都为刚体;2)皮带轮和传动带之间无相互滑动,传动带无伸长现象;3)直流放大器的输入输出是纯线性关系,电机电枢绕组中的电感忽略不计;4)小车滑动过程中的摩擦阻力与小车速度成正比,下摆旋转时的摩擦阻力矩与下摆旋转速度成正比,上摆运动时的摩擦阻力矩与下摆和上摆间相对旋转速度成正比。

2.3.2 神经网络控制
神经网络系统是由大量并行分布、有机相连的神经元构成,能逼近任意复杂的非线性关系,具有信息分布存储、并行处理的特点。神经网络具有很强的鲁棒性、容错性、自适应和自学习能力,在倒立摆系统的控制中得到了广泛应用[ 1 0 ]。
神经网络在控制系统中的应用主要是系统的辨识和控制,即利用神经网络通过学习可以逼近任意复杂非线性关系的能力,来辨识复杂被控对象的模型,在获得辨识模型之后,利用神经网络自学习、自适应的特点构造神经网络控制器进行自适应控制。通过建立二级倒立摆模型辨识神经网络,可对二级倒立摆进行离线或在线辨识。可以利用模型辨识神经网络与理想输入间的误差进行自学习,使系统具有更强的鲁棒性,实现自适应控制。
神经网络在解决不确定性、非线性、时滞复杂系统的建模和控制问题方面取得了较好的效果,但仍存在一些问题,如神经网络控制器缺乏系统化的设计方法,神经网络的拓扑结构问题,神经网络与基于规则系统的有机结合问题等,还有待进一步的研究和发展。
2.3.3 拟人智能控制
拟人智能控制的基本思想就是将人类处理问题时所依据的直觉、经验、逻辑推理这些定性控制原理融入到控制器的设计中,用以解决复杂控制系统的非线性和不确定性问题。
我国学者张明廉教授在1993年提出的拟人智能控制理论,其核心是广义规约和拟人设计控制律。其中,广义归约是人工智能理论中归约方法的引伸,扩展了本原问题的定义,并考虑本原问题间的耦合;拟人设计控制律是在广义归约的基础上根据被控对象的物理模型,参照人的直觉和经验直接形成控制律。该拟人智能控制理论已在倒立摆系统中得到成功的应用[ 1 1 ]。李德毅院士利用基于云模型的拟人智能控制方法,将人用自然语言值定性表达的控制经验,通过语言原子和云模型转换到语言控制规则器中,成功实现了对倒立摆系统的控制[ 1 2 ]。拟人智能控制不依赖被控对象精确的数学模型,把人类思维中的定性分析与控制理论中的定量计算方法相结合,为智能控制理论和复杂系统设计提供了新的思路。
3 结论
倒立摆的控制是控制领域中具有挑战性的研究课题,具有重要的理论意义和实用价值。倒立摆控制研究主要包括两方面内容:一是平衡点位置的稳定控制;二是倒立摆摆起过程控制。传统控制理论和智能控制理论在一、二、三级倒立摆平衡控制方面得到了广泛而成功的应用,并且据报道我国学者采用变论域自适应模糊控制理论[ 1 3 ]成功实现了对四级倒立摆系统的平衡控制。倒立摆的摆起控制是复杂非线性系统控制问题,这方面的研究还相对薄弱,有待更深入的研究。在对传统倒立摆进行充分研究的基础上,一些经过改造,更为复杂的倒立摆系统受到许多学者的关注,如倾斜导轨上倒立摆的控制,平行倒立摆控制等。控制理论自身的发展和成熟也是倒立摆研究未来的主要发展方向。其中智能控制理论的完善,以及模糊理论与神经网络的相互结合是重要研究内容。同时,新的检测、驱动技术也开始应用在倒立摆系统中。随着控制理论的发展和科学技术的进步,倒立摆系统的控制研究必将不断深入。
参考文献
[1]Furuta K, Ochia T, Ono N. Attitude control of a triple inverted pendulum [J]. Int. J. Control. 1984, 39(6):1351-1365.
[2]尹征琦,冯祖仁,陈辉堂.采用模拟调节器的二级倒立摆的控制[J].信息与控制,1985(1):6-10.
[3]梁任秋,赵松,唐悦,等.二级倒立摆的数字控制器设计.控制理论与应用,1987,4(1):115-124.
[4]高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1996.
[5]丁景涛,周凤歧.二级倒立摆系统的变结构控制实现[J].西北工业大学学报,2002,20(3):410-413.
[6]姚利娜,王宏,周靖林等.倒立摆系统的变结构控制方案[J].控制理论与应用,2004,21(5):724-727.
[7]谢新民,丁锋.自适应控制系统[M].北京:清华大学出版社,2002.
[8]吴忠强,岳东,许世范.非线性系统基于HM模型的自适应鲁棒跟踪控制[J].控制与决策,2003,18(2):247-253.
[9]程福雁,钟国民,李友善.二级倒立摆的参变量模糊控制[J].信息与控制,1995,24(3):189-192.
[10]蒋国飞,吴沧浦.基于Q学习算法和BP神经网络的倒立摆控制[J].自动化学报,1998,24(5):662-666.
[11]张明廉,郝健康,何卫东,等.拟人智能控制与三级倒立摆[J].航空学报,1995,11(6):654-661.
[12]李德毅.三级倒立摆的云控制方法及动平衡模式[J].中国工程科学,1999,1(2):41-45.
[13]李洪兴,苗志宏,王加银.四级倒立摆的变论域自适应模糊控制[J].中国科学(E辑),2002,32(1):65-75.
猜你喜欢
黑龙江大学自然科学学报(2022年1期)2022-03-29
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
电子技术与软件工程(2016年20期)2016-12-21
求知导刊(2016年30期)2016-12-03
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
浙江大学学报(工学版)(2015年2期)2015-05-30
火炸药学报(2014年1期)2014-03-20
计算物理(2014年2期)2014-03-11
