
无人艇在海洋救助领域中的开发研制
2018-09-27 06:57刘森林
造船技术 2018年4期
刘森林
(天海融合防务装备技术股份有限公司, 上海 201612)
0 引 言
随着人类海洋活动的日益增加,各种海难事故不断,发生海难事故后,迅速及时地救出遇险人员是救助人员的第一要务。在风小浪低的海况下,救助比较容易,但很多海难发生在大风浪下,救助船难以靠近遇险船,如果强行靠近,会导致遇险人员落水、加速遇险船只沉没。同时,救助人员也无法操作小艇靠近遇险船,离开救助船到海面上是非常危险的。因此,在大风浪海况下,如何安全地把遇险人员转移到救助船上或其他安全地点,一直困扰着很多救助人员。
1 救助无人艇开发理念
无人水面艇是一种无人操作的水面舰艇,主要用于执行危险以及不适于船只执行的任务。在配备先进的控制系统、传感器系统、通信系统和武器系统后,可以执行多种军事任务。在民用方面,无人艇可应用于气象、水文探测等众多领域,具有广泛的应用前景。
目前,我国在高海况下用于救助的无人艇的研制和开发领域少有涉猎,天海融合防务装备技术股份有限公司针对该用途的无人艇进行了研制和开发,在该过程中需注重安全性、可靠性、实用性以及和母船接口匹配的友好性。
2 海洋救助领域无人艇的开发与设计
2.1 艇型、航区及用途
海上救助无人艇以对恶劣海况下的海上遇险人员实施救助为目标,可由大型海洋救助母船搭载到遇险地点海域,按照预先设定的方式下放至海面,在母船上通过遥控控制无人艇实施人员救助,救助对象为行为正常、有一定体力的海上遇险人员,适用于中国沿海航区。
在恶劣海况下,母船与遇险船只须保持一定安全距离,并处于相对同步位置。利用母船上的吊机等设备释放无人艇,母船上的操作人员遥控无人艇靠近遇险船只,控制相对位置,被救人员可登乘到无人艇上,图1为遇险人员登乘到无人艇后的模拟图。母船上的操作人员遥控载有被救人员的无人艇返回母船预先指定区域,以实现被救人员的可控。

图1 遇险人员登乘无人艇后模拟图
本艇设置2台全回转舵桨,2套遥控操作终端,1套固定安装在救助母船驾驶台上,另1套为移动便携式,系统设置遥控位置转换开关,2套操作终端均可独立实现对无人艇的遥控。
无人艇的操作为近距离(在可视范围内)手动遥控。在通常情况下,操作人员通过控制1个总控摇杆同时控制2台360°全回转舵桨,轻松达到前进、转向、后退、横向移动等功能,并可通过调速旋钮依据需求调整螺旋桨电机转速。在特殊情况下,通过转换开关,启动分控操作,操作人员可以通过2个分遥控杆分别控制2台舵桨,这种操作更灵活,反应更灵敏。
2.2 救助无人艇主尺度
由于被营救船只发生遇险情况时,需要营救的往往不止一人,因此本艇单次营救能力越大越好,但这样势必会使无人艇的尺度增加,从而增加航行阻力,增加自重,需要更大的推进功率。另外,无人艇平时布置在母船居住区后的露天甲板上,该区域本身已布置有拖缆机等设备,加之处于驾驶室后面,因此要求无人艇搭载在母船后不得影响甲板布置及驾驶室的视野。综合以上各方面的因素,本艇的主尺度如表1所示。

表1 无人艇主尺度
2.3 艇型结构
救助无人艇由3部分构成,形状类似“汉堡”,从上至下依次为:缓冲部分、浮力体、托架,其造型如图2所示。
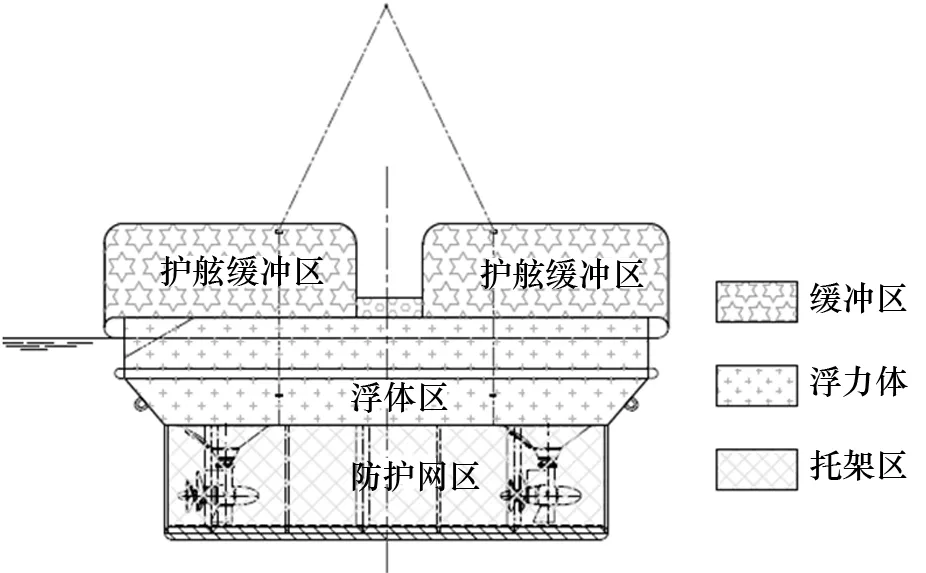
图2 救助无人艇造型
2.3.1 缓冲部分
缓冲部分采用柔性结构,由柔性舷墙和软垫构成,为遇险人员提供保护,避免任何刚性接触而造成的2次伤害,并提供一定的储备浮力,当浮力体部分破损进水,缓冲部分可提供一定浮力,保证无人艇破损后不沉。
柔性舷墙外皮为聚脲涂层,内部填充EVA防水高发泡材料,保护登艇遇险人员不掉入水中;艉部设有主登艇口,宽度约为600 mm,坡道与水面约成30°,下端伸入水面,方便体力不支的落水遇险人员登艇;两舷设有2个辅助登艇口,宽度约为500 mm,方便落水遇险人员登艇。
软垫为防水、防滑、软质的EVA高发泡材料,一方面保护从遇险船只跳下的遇险人员不受伤害,另一方面可拆下充当救生浮具。软垫与浮力体之间采用尼龙射出钩进行固定,四角绑扎在吊环上;软垫下部设有设备维修用水密舱口盖,方便设备的维护保养。
2.3.2 浮力体
浮力体材料为316L不锈钢焊接箱型结构,浮力体作为本艇的承载平台,上部为缓冲部分,下部为保护托架,舷侧环绕设有上下2条护弦,内部为设备舱,外部抵抗水的作用力。
浮力体内部设有1道Z形舱壁,将浮力体分成2个非对称空间,在1舱破损的情况下可提供足够的浮力,并避免产生过大的横倾和纵倾;推进系统被隔离成2套独立的动力系统,当破损进水导致1套动力系统失去作用,另1套动力系统仍然能继续工作。
浮力体内部沿中纵剖面方向首尾布置2台全回转推进器,其他区域设置推进系统的控制部分和蓄电池组;浮力体顶部设有不锈钢水密盖,用于设备的日常维护保养。
浮力体外围贴近水面处设纤维绳扶手,方便落水遇险人员抓住无人艇,并转移至登艇口。
浮力体甲板四角处设置吊带,用于无人艇的吊运。在浮力体的舭部设有4个绑扎扣,用于本艇停放母船甲板时的系固以及拖带。
2.3.3 托架
托架为不锈钢制焊接结构,是环形密闭体。圆环截面有一定宽度,无人艇横摇时能起到减摇效果;圆环内部可设置固定压载,用以降低重心高度。
托架与浮力体采用不锈钢支撑柱焊接连接,支撑柱沿两侧布置。托架与浮力体之间设置不锈钢防护网,防护网采用加强筋进行加强,使整个托架构成一个整体,可将鱼网拨开,避免舵桨被缠绕,同时防止螺旋桨对落水遇险人员的2次伤害。
整个船体采用混合骨架形式[1],合理的布置能有效承载船体载荷。整船结构采用整体有限元对航行状态和起吊状态进行模拟计算。推进器及其他设备区域进行有效加强,确保其有足够的强度和刚度。图3为波浪切力最大时的总水载荷。

图3 波浪切力最大时的总水载荷
2.4 总体性能
2.4.1 抗沉性
本艇浮力体被1道Z型舱壁分为两舱,任一舱破损进水,若初稳心高为正值, 不倾覆下沉,且具有正的复原力臂,说明本艇具有抗沉性[2]。
经计算,在满载吃水下艏、艉两舱分别进水后,该艇虽纵倾、横倾均较大,但没有倾覆,且从图4和图5的复原力臂曲线可以看出:此时仍具有一定的复原力臂,结果表明该艇具有较好的抗沉性能。
(1) 艏舱进水。当艏舱进水时,由复原力臂曲线为正向可以看出:本艇仍具有一定的复原力臂(见图4),从而保证本艇安全性。
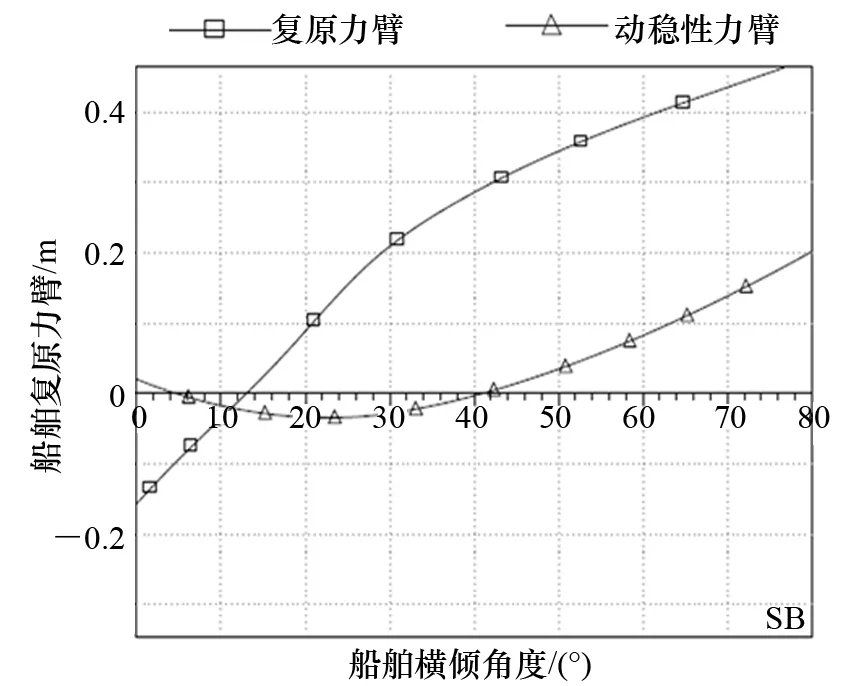
图4 艏舱进水后艇复原力臂曲线
(2) 艉舱进水。当艉舱进水后,由复原力臂曲线为正向可以看出:本艇仍具有一定的复原力臂(见图5),从而保证本艇安全性。
2.4.2 自扶正能力
本艇主尺度较小,在高海况下可能会发生倾覆,进而对被营救人员造成2次伤害。因此,本艇在设计时须具备自扶正功能,即本艇的重心位置须低于浮心位置,结合本艇特点,考虑底部托架加重或在底部托架加载固定压块,以降低本艇重心。

图5 艉舱进水后艇复原力臂曲线
本艇复原力臂曲线如图6所示。从图6可以看出:本艇在0°~180°范围内具有恢复正浮的能力,在180°~360°范围内也具有恢复正浮的能力,从而保证船舶的安全性。
2.5 主要设备及系统
本艇为双机舱设计,每个机舱设置储能装置、推进装置、电气设备等。机舱及主要设备布置如图7所示。

图6 无人艇复原力臂曲线

图7 机舱及主要设备布置
本艇为直流电源交流电力推进系统,直流电源采用蓄电池,蓄电池组通过电源配电装置向推进驱动变频器和逆变器等负载供电。电池的选择须综合考虑安全性、能量密度、环保性、成本等因素,几种主要类型电池性能对比如表2所示。

表2 锂电池不同电极材料对应电池性能比较表
铅酸电池安全性高,但是能量密度较低,结合本艇的布置空间及上述各项性能因素,选用磷酸铁锂(LiFePO4)电池作为储能装置。
本艇推进装置采用全回转舵桨装置,其选型时,绕组和金属零件的表面均须按照湿热电机的要求进行,经过特殊浸渍和处理,具有良好的防水、防潮、防霉、防油雾、抗盐雾、抗冲击、抗震动等性能,能在高海况下正常运行。
设置2套控制柜,控制柜通过数据线缆连接驱动柜内伺服电机控制器、数传电台等,构成整个控制系统的核心。设置1套无线传输收发装置及控制系统,采用联合操纵的方式控制无人艇的位置。2台舵桨可联合操作,设置转换开关,也可分别独立操作。设置2台数传电台及天线,保证船舶在恶劣海况情况下的数据传输。数传电台具有抗干扰、非视距通信、设置灵活、性能优异等特点。设置1套控制柜、母船固定操作终端及便携式操作终端。母船操作终端和便携式操作终端主要由显示屏、操作手柄和转换开关组成;便携式操作终端具有室外防水的功能。
2.6 接口友好性
无人艇在不工作时,可直接放置在母船甲板上,在浮力体的舭部设有绑扎扣,对应的母船甲板上也设有绑扎扣,采用栓紧带进行系固。
无人艇艇侧设置充电插口,母船上设置充电机,在本艇停放母船时能对蓄电池进行充电。
无人艇采用帆布罩进行保护,帆布罩设有拉孔,甲板上设有拉环,拉孔与拉环用纤维绳进行连接。
3 结 语
无人艇在海洋救助细分领域的研制开发是创新海上救助方式、提升综合海洋救助能力的大胆尝试和探索。目前该产品已交付并列装到母船上,后续将持续跟踪实际使用情况,不断改进完善,更好地服务于海洋救助工作。
猜你喜欢
农业装备与车辆工程(2022年4期)2022-10-31
舰船科学技术(2022年10期)2022-06-17
船舶标准化工程师(2019年5期)2019-11-11
汽车实用技术(2018年18期)2018-09-26
价值工程(2017年31期)2018-01-17
中国军转民(2017年9期)2017-12-19
专用汽车(2016年8期)2016-03-01
汽车实用技术(2015年8期)2015-12-26
物理教学探讨·初中学生版(2009年3期)2009-05-13
