
电动驻车系统在联合收割机上的应用
2018-09-20 01:04郝良军
时代农机 2018年7期
郝良军
(新疆新研牧神科技有限公司,新疆 乌鲁木齐 830011)
目前国内联合收割机普遍采用机械式手刹制动,机械式驻车制动装置具有结构简单、成本低廉、调试方便等优点,但需要操作力大,操作力度无法准确达到所需手刹制动力。驾驶员操作机器时,容易忘记松开手刹,由于农业机械行走驱动功率较大,牵引力远大于驻车制动力,烧毁手刹的概率比较大,存在较大安全隐患。随着人机工程学在农业机械上的应用,符合人机工程学的浮动操作台慢慢普及,浮动操作台占用了原来处于驾驶员右侧的机械驻车制动杆位置,制动杆只能安装于右侧,对于各种车辆,右侧绝大部分都是驾驶员进入驾驶室的通道,制动操作杆在右侧则会产生一些便利性问题,且还存在驾驶操作习惯的改变问题。
鉴于目前机械驻车制动装置的优缺点,开发了这种电控手刹制动装置,其缺点:造价稍高,蓄电池无电时无法使用,控制结构复杂。优点:轻触式操作,可以完成自动释放或者自动限制行走从而杜绝烧毁驻车制动装置,机械硬连接机构避免了机械手刹软轴断裂所带来的安全隐患,占用空间小便于安装维护,程序固化后几乎不需要调试,驻车制动力始终保持恒定。
1 工作原理及组成结构
整套电动驻车系统的主要工作原理是依据电动机的输出扭矩和电动机的输入电流的近似线性关系,结合对应的电流检测装置和其他辅助装置来完成的。
实现方法有两种:1通过继电器实现,2通过plc结合继电器实现,分别阐述如下:
(1)继电器实现方法
本例主要采用的部件是汽车五插继电器、电流感应开关、三档翘板开关、状态指示灯、保险丝、电源、手刹电推杆。具体工作原理图如图1所示。
工作过程:闭合开关K2闭合后,电流方向为正极→保险 F1→JD2(NO)→JD3(NC)→K4(NC)→M1→K3(NC)→SW1→JD1(NC)→负极,手刹电机带动变速箱手刹杆动作,当电机负载(驻车力)逐渐增大时,电路中电流逐渐增大,达到电流感应开关动作阀值时,电流感应开关闭合,指示灯被点亮并通过JD4保持,同时JD3动作切断闭合电源,手刹电机停止。按下释放开关K1,电流方向为正极→JD1(NO)→SW1→K3(NC)→M1→K4(NC)→JD3(NC)→JD2(NC)→负极,执行机构运行到极限位置后,释放限位开关动作切断释放电源,K1闭合时同时触发JD5,关闭指示灯。
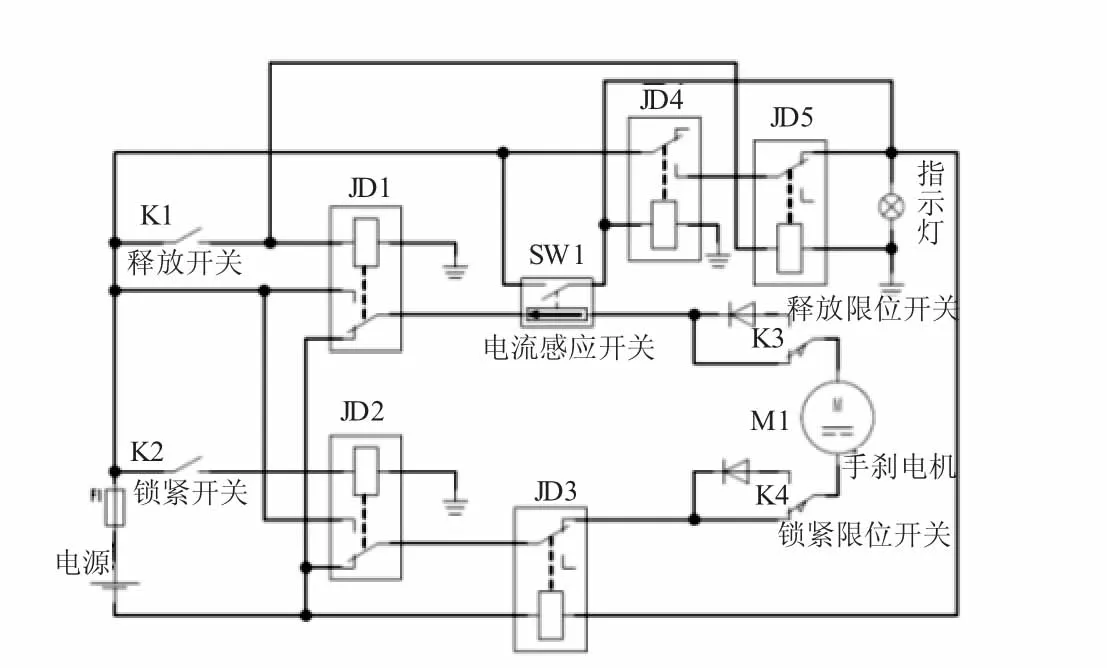
图1 继电器原理图
(2)利用PLC实现
本例主要部件欧姆龙PLC、五插继电器、电流感应开关、手刹电推杆。所采用的PLC以欧姆龙的CP1E为例,使用端口:输入端口有 0.00,0.01,0.02,输出端口有100.00、100.01、100.02。电路原理图如图2所示。
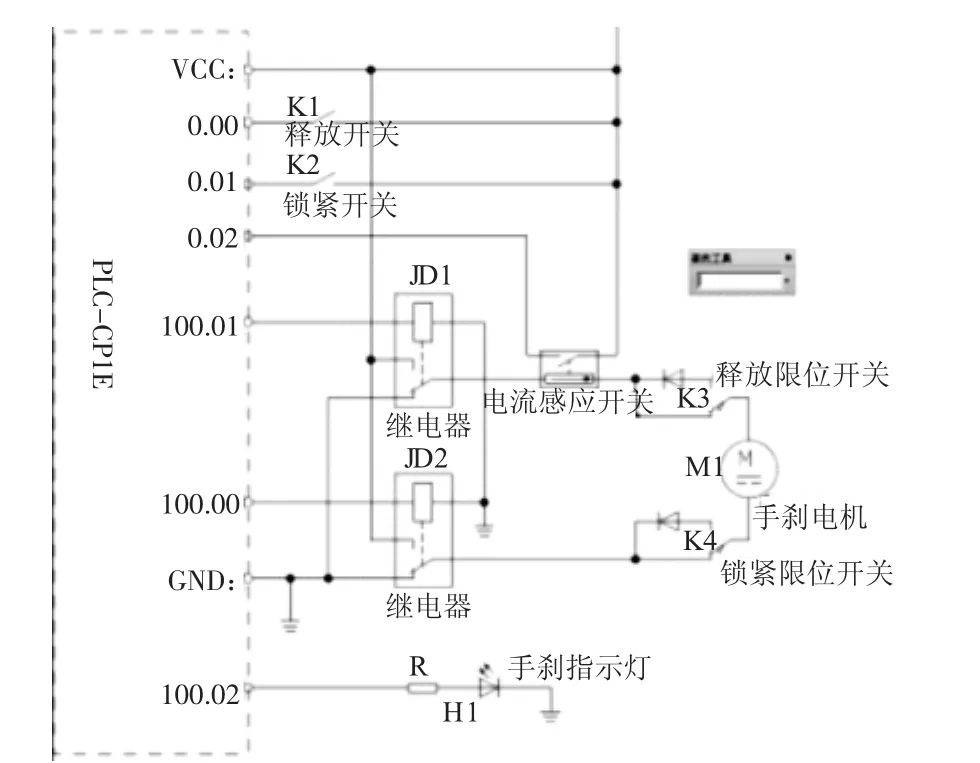
图2 PLC原理图
程序梯形图如图3所示。

图3 PLC控制梯形图
其工作流程:
(1)释放手刹:PLC输入端口0.00的接收到开关量K1的信号时,输出端口100.00有效,驱动释放继电器JD2工作,手刹释放,手刹推杆到达极限位置时释放限位开关动作切断电机电源,同时复位100.02端口,熄灭手刹指示灯。完成释放动作过程。
(2)锁紧手刹:PLC输入端口0.01的接受到开关量K2(K2和K1为互锁开关)的信号时同时判断输入端口0.02状态是否为无效(电流感应开关没触发时)和输出端口状态100.02是否没输出(手刹指示灯没亮时),输出端口100.01有效,驱动锁紧继电器JD1工作,手刹锁紧,当电路电流达到设定预紧力对应的电流值时,端口0.02有效(电流感应开关触发),输出端口100.01复位,JD1复位,电机断电同时100.02端口输出,点亮手刹指示灯。完成锁紧动作过程。电流感应开关SW1可以根据变速箱的手刹技术参数和图4的电机负载曲线图设置触发阀值。机械连接结构由变速箱总成、电动推杆、长度调节杆组成,如图5所示。
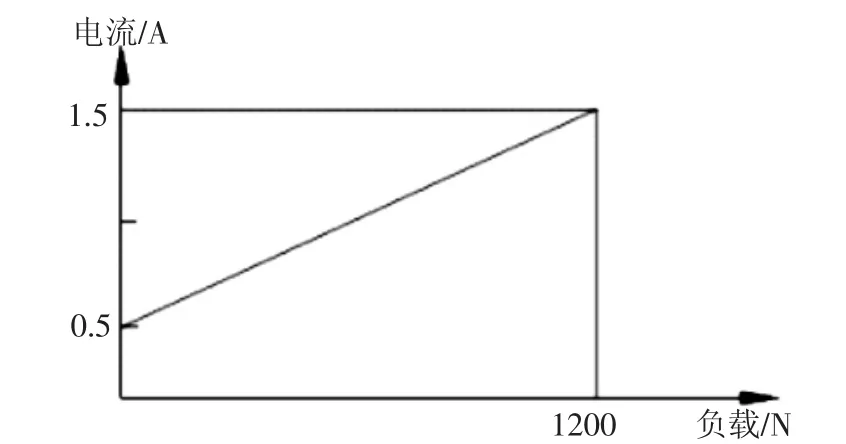
图4 电机电流负载曲线图
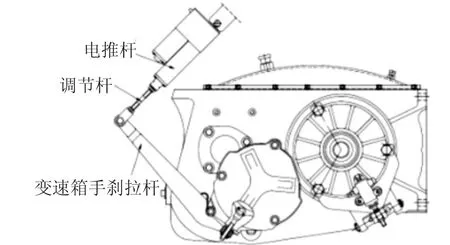
图5 机械连接图
2 主要设计技术参数及性能指标
所述实施方案所用主要部件的性能参数如表1和表2所示。
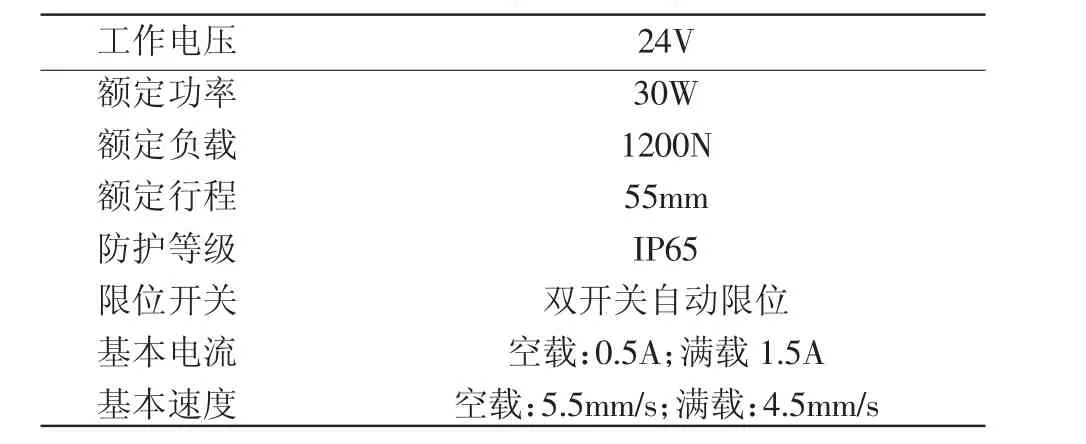
表1 电动推杆性能参数表
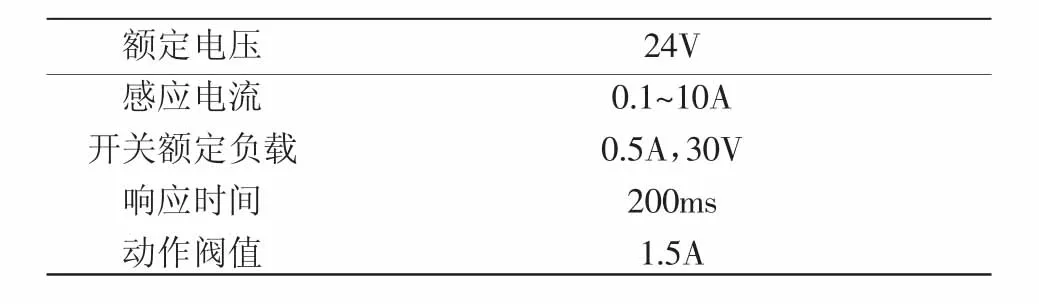
表2 电流感应开关参数表
3 实验与分析
系统设计完毕后,在牧神籽粒联合收割机4YZT-12机型实验通过。实验过程中通过调整电动推杆与变速箱手刹拉杆之间的调节杆长度使电动推杆锁紧限位开关的动作滞后于电流感应开关的动作,以达到设计制动力。并且将锁紧限位开关信号引出后引入主机控制系统,通过仪表显示手刹故障状态。通过手刹状态故障指示灯可以诊断出连接杆距离或者手刹片有效厚度是否满足要求。
如果将手刹指示灯信号引入主机控制系统后,通过主机控制系统的逻辑关系则可以完成手刹拉起时限制行走或者车辆行走时自动释放手刹,如果增加对应的座椅人员检测传感器后还可以完成驾驶员离开座椅后自动锁紧手刹的安全功能,从而完成类似轿车的AUTOHOLD功能。
4 结语
综上所述,所开发的联合收割机电动驻车系统适合用于联合收割机等大型农业机械上,文章所述方案对于目前国内农机逐渐普及的含有车身控制器的电控系统很容易实现智能化,从而为缩小我国农业机械智能化与国外先进国家的农业机械智能化的差距而添砖加瓦。
猜你喜欢
宝钢技术(2022年4期)2022-12-23
机械管理开发(2022年5期)2022-07-07
汽车维护与修理(2018年9期)2018-10-31
中国核电(2017年1期)2017-05-17
人民交通(2016年6期)2017-01-05
西藏科技(2016年10期)2016-09-26
汽车维护与修理(2015年2期)2015-02-28
汽车维修与保养(2013年11期)2013-07-25
制造业自动化(2011年10期)2011-01-19
