多电源并联运行的效率优化控制方法
2018-09-18 04:15王言畅
电力系统自动化 2018年17期
张 强, 王言畅, 王 锐
(1. 哈尔滨工程大学自动化学院, 黑龙江省哈尔滨市 150001; 2. 中兴通讯股份有限公司, 广东省深圳市 518001)
0 引言
在电力系统中为了满足大容量的需求,经常会出现多个电源(包括储能装置)并联运行的情况。对于这种由多个电源构成的电源系统,目前大多采用均流控制[1-6]来实现其内部多个电源单体间的负荷分配,进而确保电源系统的安全运行。但是电源单体效率特性的差异(例如不同厂家、不同型号的电源,即使设计参数、具体结构完全一样的电源,由于内部器件老化、寄生参数不同等因素的存在,其效率特性也必然存在一定差异)致使均流控制并不能使电源系统的稳态运行效率达到最优,对于大功率电源系统来说,微小的效率差异都意味着大量能量的浪费。近几年来,通过合理的负荷分配来优化并联电源的效率问题已经开始引起了研究人员的重视,并进行了相关研究[7-13]。
文献[7]针对并联变换器系统,基于单个变换器的效率曲线,采用穷举优化算法优化不同负载功率时各并联变换器的最优功率分配值,并通过离线优化、在线查找方式来提高优化速度。但离线优化的处理方式限制住了该控制方法的灵活性。
文献[8]针对并联的电源,利用物理关系建立一系列数学模型,并进行参数辨识,根据一系列数学推导完成对并联直流电源系统效率最优的负荷分配控制。但是该控制方法存在以下几个问题:一是建立的数学模型过于理想化,只能通过储能电感串联不同电阻来改变电源的效率特性;二是控制系统未加控制器,占空比依靠数学计算获取,若对系统参数辨识不准确,必然会导致电源系统的输出产生误差。
文献[9-11]也提出了利用不均流的负荷分配来提升并联直流电源效率的控制策略,其思想为:若n个电源并联,以总的负载电流值以及每个电源模块在效率最优运行时的输出电流值为依据,令其中m-1个电源模块工作在各自的效率最优运行点,使第m个电源模块来承担剩下的负载电流,而剩下的n-m个电源模块则不工作,进而实现系统效率最优。但是该方法所提出的电源效率数学表达式中涉及到电源电路的寄生参数,在实际情况下寄生参数的获取相当困难,因此相关研究仍只局限于理论上的分析。
在国内的相关研究中,以文献[12]的研究成果具有代表性,其利用联立方程求解的方法获得电源的效率特性,并将多电源间的效率优化归纳为最小值求解的数学问题。但是研究中并没有涉及在采用效率优化控制时,如何解决电源系统动态调解过程中的安全性等问题。
针对目前的研究现状及相关技术的不足,结合直流微网的具体科研项目,本文以两个直流电源并联所构成的电源系统为研究对象,针对电源的效率特性分析及其数学表达式、寻优算法设计等具体问题展开研究,同时考虑到电源运行过程中存在有动态和稳态等多种工况,设计出复合控制策略,既可以确保动态过渡过程中每个电源单体的安全性,又可以实现稳态运行时的总体效率最优控制。
1 直流电源效率特性拟合
直流电源电路的形式多种多样,本文以典型的Buck电路为例进行分析和研究。Buck电路中的损耗主要由电感损耗、电容损耗、功率开关器件和二极管的导通损耗,以及开关损耗等组成,在直流电源输入、输出电压不变,并且忽略环境温度对电路参数的影响,以及寄生参数的非线性特性的前提下,可认为直流电源的功率损耗只与电源的输出电流有关,即可以将直流电源的效率特性看作是效率关于其输出电流的函数[14-17]。由于大多数寄生参数的不可测性,因此无法利用公式直接绘制出电源的实际效率特性曲线,只能在实验的基础上,通过数据点拟合的方法获得近似效率特性曲线。
本文为了实现对电源系统总效率的分析,采用利用正交多项式最小二乘法对离散采样数据进行拟合的技术方案来获取每一个电源单体的效率特性。为了验证该方案的效果,本文在仿真环境下搭建了两个Buck电路型电源,这两个电源的Buck电路基本参数一致:输入电压Uin=250 V;输出电压Uout=100 V;电感L=15 mH;电容C=250 μF,但是电路中的寄生参数数值不同。采用电压电流双闭环控制策略,仿真并记录了每个电源的7组稳态输出电流和对应的效率数据,如表1所示。分别采用5次、4次、3次正交多项式最小二乘法进行拟合,得到两个直流电源的拟合的效率特性曲线如图1所示。
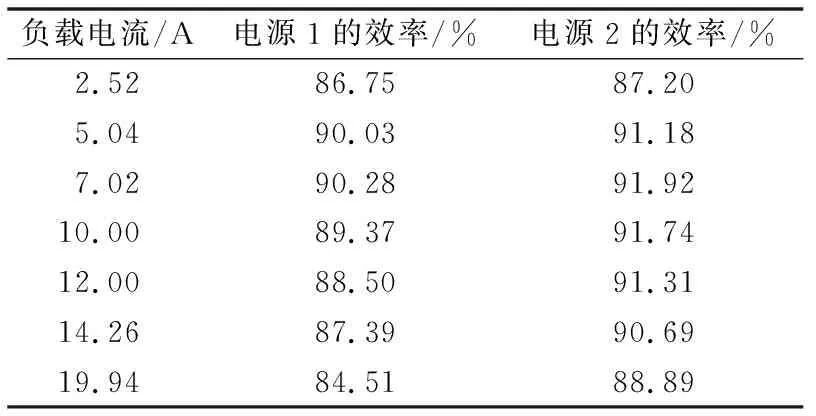
表1 仿真环境下效率与输出电流Table 1 Efficiency and output current in simulation
虽然在仿真模型中,各个器件的寄生参数可作为已知参数,但是由于效率特性的函数表达式中包含有占空比D,并且电感电流也不是恒定值,因此仿真中也无法利用函数表达式直接得到精准的效率特性曲线,故在图1中无法给出实际效率特性曲线用于比较。由图1可以看出,拟合多项式的次数越多,与实际数据的拟合精度就越高,采用5次正交多项式最小二乘拟合时,拟合的效率特性曲线与实际效率运行点具有很好的重合度。因此综合考虑计算工作量和拟合精度等因素,最终选择利用5次正交多项式拟合曲线作为直流电源的效率特性,进而分别得到并联系统中两个直流电源单体的效率η1(Io1)和η2(Io2)如式(1)所示:
(1)
式中:mi为电源1效率特性拟合的多项式系数;ni为电源2效率特性拟合的多项式系数;Io1和Io2分别为电源1和电源2的输出电流,此处与负载电流相等。
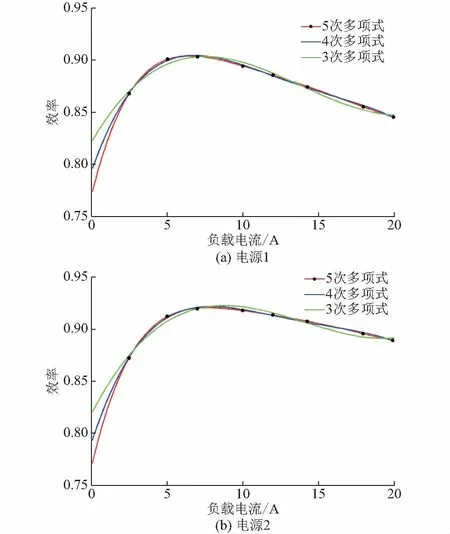
图1 利用正交多项式最小二乘法拟合的效率特性曲线Fig.1 Efficiency characteristic curves fitted by orthogonal polynomial least squares
通过对两个电源拟合效率特性曲线的对比可以看出,由于寄生参数的不一致,不同直流电源的最大效率值及其对应的工作点都不尽相同。
2 并联直流电源系统的效率优化
若直流电源系统由n个电源单体并联构成,那么并联直流电源系统的整体效率η可表示为:

(2)
式中:Pout为并联直流电源系统的输出总功率;Pin为并联直流电源系统的输入总功率;Pout,i为第i(i=1,2,…,n)个电源单体的输出功率;Pin,i为第i个电源单体的输入功率;ηi为第i个电源单体的效率。
由于直流电源的效率是关于输出电流的函数,那么式(2)中η1,η2,…,ηn可由各个电源的输出电流表示,因此并联直流电源的总体效率也可以用每个电源输出电流的函数表示,可将式(2)简化为:
η=f(Io1,Io2,…,Ion)
(3)
式中:Ioi为第i个电源单体的输出电流值,i=1,2,…,n。
既然电源系统的效率是一个关于Io1,Io2,…,Ion的多元多次函数,那么基于效率优化的负荷分配就可转化为求解系统效率最大解的问题,即
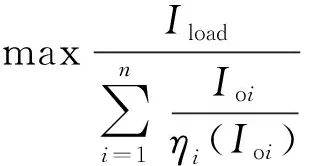
(4)
式中:Iload为并联直流电源系统负载电流值。
考虑到每个电源单体的输出电流都有一定的范围,例如电源单体输出电流的下限可设为临界连续电流值,而电流的上限为电源的额定电流值,并且每个电源单体的上下限幅可能各不相同,但是所有电源单体的输出电流之和必须等于总负载电流。那么基于效率最优的并联直流电源负荷分配问题又转化为具有约束条件的效率极大值求解,将约束条件代入式(4)可得:
(5)
式中:i=1,2,…,n;Imin,i为第i个并联电源模块的最小电流值;Imax,i为第i个并联电源模块的额定输出电流值。
将式(5)中的等式代入效率公式中,可得:
(6)
式中:i=1,2,…,n-1。
因此基于效率最优的负荷分配问题最后可以简化为带约束条件的n-1元函数求极大值的求解问题。针对函数极值的求取,目前常用的算法有爬山法、粒子群算法、神经网络算法、遗传算法等。其中遗传算法对函数寻优是从函数的随机解出发进行寻优计算,对函数没有连续性的限定,也不存在对函数的求导运算,且能够自适应调整搜索方向,自动获取优化的搜索区域,可以快速实现收敛运算,寻优结果好。在求解函数极值的问题上具有很好的鲁棒性,并且计算结果合理。因此本文采用遗传算法对电源系统进行效率寻优计算,制定出电源系统在系统效率最优时的负荷分配方案。
3 遗传寻优算法设计
基于遗传算法的效率寻优设计流程如图2所示。
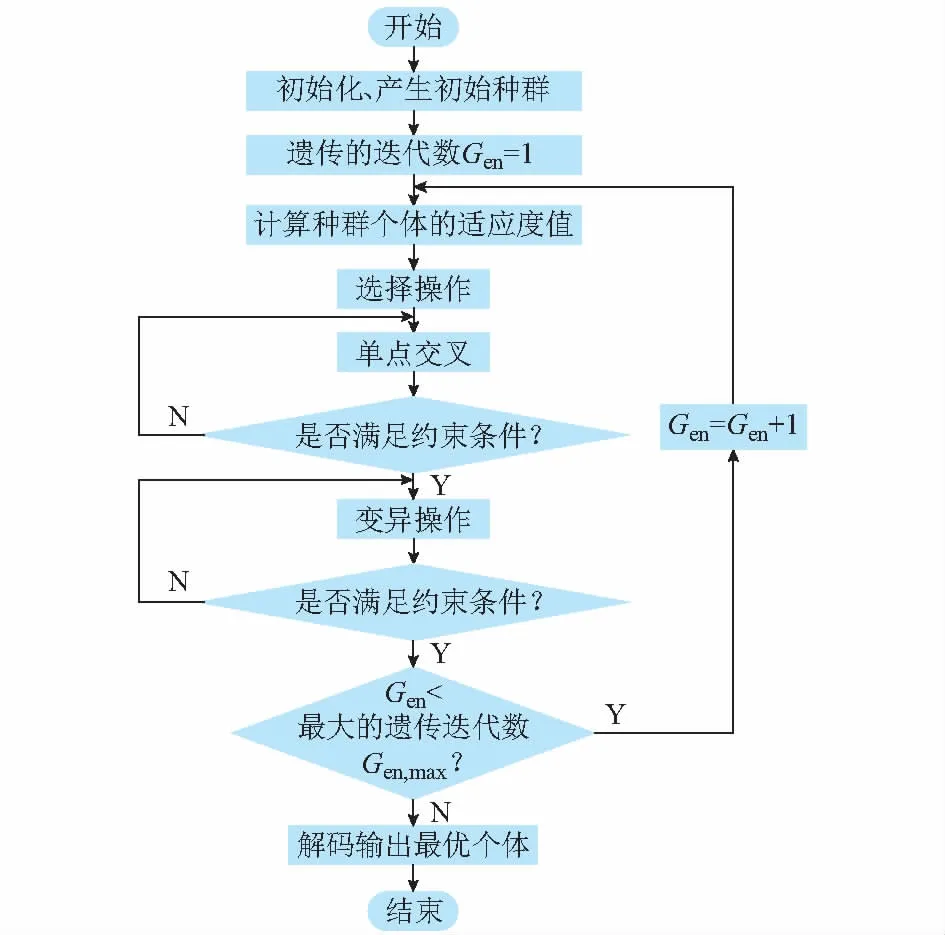
图2 基于遗传算法进行效率寻优的流程图Fig.2 Flow chart of genetic algorithm optimizing
基于遗传算法的效率寻优设计可分为以下几个关键步骤。
步骤1: 输入总的负载电流Iload和并联运行的电源个数n,根据编码规则随机产生的一个初始种群。这其中涉及编码与反编码设计技术,具体设计如下。
由式(6)可知,电源系统的效率寻优问题是一个关于n-1个变量的函数寻优问题,因此遗传算法中的个体x为一维向量[Iref,n-1,…,Iref,2,Iref,1],Iref,i(i=1,2,…,n-1)表示第i个电源分配的负荷电流,个体中变量的数量为n-1,假设变量Iref,i的二进制长度设置为pi,并且对电源电流的精度要求为小数点后2位,那么pi可表示为:
2pi-1<({Imax,i}A-{Imin,i}A)×102≤2pi-1
(7)
假设每个电源模块的最小值均为1 A,电源模块输出电流的额定值均为20 A,那么可得210<(20-1)×102=1 900≤211-1,即每个变量的二进制长度为11,那么对个体进行编码后,每个染色体二进制串的长度为11(n-1),编码后染色体二进制串从右往左分别代表Iref,1,Iref,2,…,Iref,n-1。
在计算系统效率时,需要对每个染色体进行反编码,输出染色体中每个变量的实际值,对染色体进行反编码的公式为:

(8)
式中:j为染色体的二进制数的位数,右边第一位为j=0。
对染色体反编码后可以得到个体的实际值,即x=[Iref,n-1,…,Iref,2,Iref,1],但是个体只是取了n-1个电源模块的输出电流,所以第n的电压模块的输出电流可以用其他n-1个电源模块的输出电流表示,即
(9)
步骤2:初始种群产生后,根据生物遗传的规律,在每一代遗传中,根据个体的适应度大小选择个体,并且进行交叉、变异操作,若经过交叉变异产生的新个体不满足约束条件,则产生的新个体不进入下一代。再次进行交叉变异操作,直至产生的新个体在约束条件以内,才进入下一代。这其中涉及适应度函数和遗传(选择、交叉、变异)算子的设计技术,具体设计如下。
1)适应度函数设计。由于本文中遗传算法的目标函数为并联直流电源系统的整体效率f(x),其中x=[Io(n-1),…,Io2,Io1],是针对函数最大值的求解,因此可直接将目标函数作为遗传算法的适应度函数,即Fit(x)=f(x),即目标函数值越大,效率越高,表明个体的适应度越强。
2)选择算子设计。本文采用了轮盘赌选择法,即个体被选择留下来的标准是自身的适应度函数值的大小,每一个个体的适应度值与其被保留下来的概率成正比。如果种群大小为N,其中个体xi的适应度函数为Fit(xi),那么经过选择算子,个体xi被保留下来的概率P(xi)如式(10)所示:
(10)
对每一代的种群进行多轮选择,每一次都随机产生一个0和1之间的随机小数,如果产生的随机
数大于个体被保留的概率,那么个体被保留,进行多轮选择后组合成新的种群。
3)交叉算子的设计。本文中使用的是经验法单点交叉算子。在交叉操作之前,首先对种群中的个体进行随机配对,对每一对配对好的染色体进行交叉操作时,都先产生一个随机小数,并与预先设定的交叉概率做比较,如果小于设定的交叉概率,则这一对染色体进行交叉操作,否则不进行交叉操作直接进入子代种群。交叉操作时,由于本文所设计的染色体长度L=11,因此随机产生一个介于1和11之间的整数,以确定每一对染色体交叉点的位置,进而实施交叉,产生两个新的染色体。比较子代和父代的适应度值,若子代适应度高,则保留子代,但是若交叉后子代的适应度不如父代高,那么仍保留父代。采用该交叉算子设计可以加快遗传寻优的速度。
4)变异算子的设计。本文中的变异算子也采用经验法变异算子。考虑种群大小和染色体长度,变异概率可在0.001到0.1之间选取。通过随机产生小数,与变异概率做比较的方法,判断染色体的每一位基因位是否为变异位,如果随机产生的小数小于变异概率,那么该位为变异位,对该位的基因进行取反操作,否则,该位的基因不进行变异取反操作。在变异操作后,通过比较父代和子代的适应度值,选择保留适应度高的染色体。
步骤3:最后一代种群中的最优个体经过解码操作,输出最优解,最终得到并联电源系统整体效率最优时的负荷分配情况。
在寻优过程中,如果某一个电源被分配的电流超过了其运行极限,即无法满足式(5)和式(6)中的约束条件,则取其限值作为寻优解,并将总负载电流减去该寻优解后,在剩余的其他电源中重新优化分配。
4 复合控制策略
电源的效率是针对稳态运行工况而言的,在电源的启动或负载突变等动态调节过程中,由于电路中电感、电容等元件储能状态发生变化,此时的效率值不具备理论分析和实际参考价值,因此在动态过程中采用效率优化控制毫无意义,甚至可能会影响电源系统的安全性。在动态过程中,控制策略的选取应该是以确保电源系统中各个电源单体的安全运行为核心,因此本文设计出动态均流控制与稳态效率优化控制相结合的复合式控制策略。
采用复合式控制策略的电源1的控制框图如图3所示。图中,PWM表示脉冲宽度调制;开关S有两种状态,0表示动态,1表示稳态。
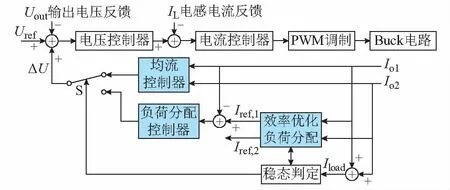
图3 两个直流电源并联系统负荷分配方式的判断模型Fig.3 Judgment model of load distribution for two DC power parallel system
均流控制器采用最大电流法设计完成,负荷分配控制器采用比例控制器。若在连续的几个判断周期内总负载电流Iload的幅值没有明显变化,可认为电路处于稳态运行工况,启动效率优化负荷分配算法进行寻优计算,待寻优计算完成后,再将选择开关S接通至负荷分配控制器的输出端,实现对电源系统的效率优化控制;反之,将选择开关S接通至均流控制器的输出端,实现电源单体间的均流控制。
在实际应用中,即使是各个电源都处于稳定运行状态,由于输出电流中往往包含有较大的纹波以及各种干扰信号的影响,致使处理器采集到的输出电流数据并不是一个恒定数值,为了避免出现运行状态的误判而导致控制器频繁切换情况的发生,需要在稳态判定环节中加入一定的幅值不灵敏区间以及时滞环节,即只有在一定的时间段内检测到负载电流Iload连续发生较大变化(或近似恒定)时,才对状态进行重新判定。在控制过程中,均流控制的优先级最高,一旦判定是处于动态运行工况,则立即中断当前的效率优化控制,转为执行均流控制,确保电源系统安全运行。
5 仿真分析
本文以前面效率分析环节所建立的两个Buck型直流电源并联系统为仿真对象,对基于遗传算法的效率优化控制策略进行了仿真验证和分析。
仿真中电源系统的整体效率即为遗传算法中的目标函数;因为只是两个直流电源并联,那么个体中变量的数量为1,令个体x=[Iref,1];两个直流电源电流最小值均设为1 A,额定电流均设为20 A,根据对编码与反编码的设计可知,染色体的二进制长度为11;种群大小设置为100;最大遗传代数设置为100;交叉概率为0.7;变异概率为0.05。因为还存在对第二个电源模块输出电流的限定,所以遗传算法中的约束条件为:
{Iload}A-20≤{Iref,1}A≤{Iload}A-1
(11)
当负载等效电阻为5 Ω时,电源系统中的两个电源各自输出电压(滤波电容端电压)、电流的仿真波形如图4(a)所示。在电源的启动阶段,由于输出电流在时刻变化,因此在该阶段内控制器采用的是均流控制策略,从图中可以看出,电源的输出电压在经过短暂的动态调节过程后,0.01 s左右达到基准电压值100 V,过渡到稳定运行阶段,在均流策略的控制下,动态和稳态运行过程中两个电源的输出电流幅值基本一致。当并联的电源系统稳定运行一段时间后(该段时间的大小主要取决于遗传优化算法的运行时间),控制器自动切换至基于效率优化的负荷分配控制策略,在切换过程中各电源的输出电压没有明显的幅值波动。控制策略切换后,电源1输出电流由10 A迅速下降并稳定在8 A左右,而电源2的输出电流由10 A迅速上升并稳定在12 A左右。
为了验证效率优化控制策略的有效性,需要对这两种负荷分配控制方式下并联直流电源系统的整体效率进行对比分析。通过改变负载等效电阻值,对并联直流电源系统进行了多次仿真分析,分别记录不同负载时这两种控制模式下电源系统的整体效率值,并且绘制出系统效率随负载电流变化的趋势图,具体如图4(b)所示。由图中可以看出采用效率优化的负荷分配控制方法较之传统的均流控制,并联电源系统的整体效率在整个运行区间内均有所提升,效率提升的最大值约为1.2%,充分验证了所提出的基于效率最优的负荷分配控制策略的正确性和有效性。
由图2可见,标记前共有五个连通域,采用这种四连通域标记算法,可以把图像中所有的1都标记出来,分别形成不同的连通域,用1、2、3、13、14五个标号来代表不同的连通域,效果较好。
电源1分别在这两种负荷分配控制模式下的总负载电流与其分配到的负荷电流关系曲线如图4(c)中所示。由图4(c)可以看出在总负载电流很小时,基于效率优化进行负荷分配控制与均流控制相比,电源1的效率要低,但是当总负载电流变大,约大于15 A时,电源1在效率优化负荷分配控制下的效率要大于均流控制时的效率。
对电源2的类似分析如图4(d)所示。电源2在轻载时,采用基于效率优化的负荷分配控制的效率要高一些,而当总负载电流约大于13 A时,采用均流控制的效率要高一些。
因此基于效率最优的负荷分配控制并不是一味地改变其中一个电源的运行点,就可以使效率总是比均流控制模式下要高,而是要综合改变两个电源的运行点,来调节整个系统的整体效率,使得系统整体效率最优。
图4(e)和(f)给出了并联电源系统在负荷突加和负荷突减工况下的仿真波形,在0.2 s时控制器检测到总负荷电流发生了变化,迅速切换至均流控制策略,在该策略的控制下完成电源系统工况变化的过渡过程。在新工况下稳定运行一段时间后,再切换到效率优化控制策略,重新分配负荷电流,实现系统效率最优。

图4 仿真结果Fig.4 Simulation results
6 实验验证
以仿真中所采用的Buck电路设计参数为依据,搭建了实验用并联直流电源系统。其中每一个直流电源均采用DSP28335作为控制核心,通过串行总线与上位机(PC机)实现数据通信。
在实验开始前,首先分别对两个直流电源进行多次实验调试,根据不同负载工况下的稳态输出电流值与对应的效率值,利用正交多项式最小二乘法拟合法,获得各自的效率特性曲线。将拟合后的两个电源的效率特性代入遗传算法的目标函数公式,作为遗传寻优的适应度函数,为效率寻优过程中的优胜劣汰提供判据。
实验过程中,每一个电源将采集到的数据通过串行总线传送至上位机,当电源输出电流在一定时间段内波动较大时,上位机向电源发送指令实施均流控制,当输出电流近似于恒定时,上位机利用遗传优化算法求解出每一个电源的负荷电流分配值,传送至相应电源,并切换至基于效率优化的负荷分配控制策略。
图5给出了实验过程中分别利用不同示波器获得的部分实验波形,其中图(a)为电源1和电源2的输出电流变化波形,图(b)为负载处电压波形。t1时刻之前采用的是均流控制策略,两个电源的输出电流基本稳定在6 A左右,负载电压稳定在100 V;在t1时刻,控制策略切换为效率优化控制,经过短暂的电流过渡过程,电源1的电流稳定在7.2 A,电源2的电流变为4.8 A,控制策略切换后,负载处的电压略有小幅增加,但变化数值很小,主要是由于电源1为了加大输出电流而抬升输出电压而导致的;在t2时刻发生了负载突变,控制策略迅速变回均流控制,经过一段过渡时间后,两个电源的输出电流都稳定在4.3 A左右,过渡过程中,负载处电压发生了较为明显的波动,此处波动的产生虽然与控制策略的切换有一定的关系,但主要是取决于控制器中的比例—积分(PI)参数设计和电路中的电感、电容取值,因为即使是单一的均流控制在负载突变的过程中也会产生近似的波动。
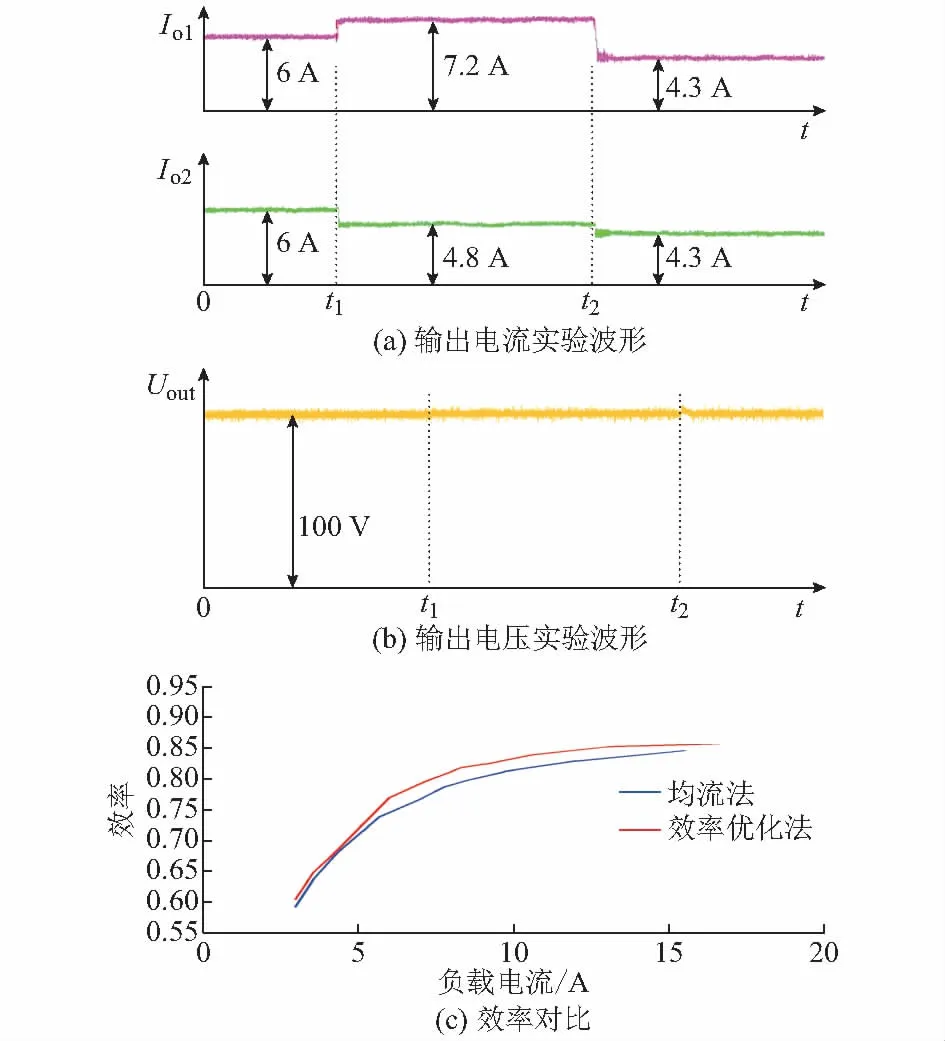
图5 实验波形Fig.5 Experiment curves
多次改变负载电阻,对并联直流电源系统分别进行均流控制和基于效率优化的负荷分配控制,由上位机计算总负载电流值和此时系统的整体效率,得到在两种负荷分配方式下系统的整体效率与总负载电流的对应关系曲线,具体如图5(c)所示。由图中可以看出基于效率优化的负荷分配控制与均流控制相比,的确提升了并联直流电源系统的整体效率,效率提升的最大值约为3.8%。
7 结论
本文以并联直流电源系统的整体效率最优为控制目标,提出了相应的负荷分配策略及其实现方法,总结如下。
1)采用正交多项式最小二乘法拟合法来获得直流电源单体的效率特性,虽然理论上来讲多项式的次数越高,拟合效果越好,但仿真和实验表明,5次多项式即可很好地满足控制需求,为效率特性的获得提供了简单而有效的方法。
2)推导出并联直流电源系统的效率关系式,将效率最优的负荷分配问题转化为带约束条件的n-1元函数求极值的问题,为效率最优控制策略的实现提供了数学模型。
3)采用遗传算法实现效率寻优,并针对效率寻优的特点,完成了编码与反编码、适应度函数、选择算子、交叉算子、变异算子等遗传算法的具体设计工作,在确保了寻优算法的可实施性和结果的可信性的同时,提高了算法的效率和精度。
4)针对电源的实际运行工况,提出了动态均流控制与稳态效率最优控制相结合的复合式控制策略,既可以确保并联直流电源系统中每一个电源单体的安全、稳定运行,又可以提高系统的整体效率。
5)仿真和实验验证了效率最优控制策略的有效性和实用性。
6)当电源系统满负荷或接近满负荷运行时,受约束条件的限制,效率最优控制策略与均流控制策略的控制效果相近似。
在实际运行过程中,当效率特性不可用时(例如新并入的电源),上位机可直接采用均流控制,通过对多个稳态运行点数据的检测,拟合出相应的效率特性曲线后再转为效率优化控制。并且随着电源运行性能的变化,可以利用实时检测到的稳态运行数据对效率特性曲线进行定期的修正,确保效率优化的控制效果。
复合式控制策略虽然既可以实现稳态运行时的效率优化,又可以保证动态调节中的运行安全性,但是由于存在有不同控制方法的切换过程,以及寻优算法耗时过长、实时性差等缺陷,因此针对负荷频繁波动、变化的运行工况,该控制策略的控制效果有限,还需从控制方法的原理设计、实施技术等方面予以进一步的完善。
张 强(1975—),男,通信作者,博士,教授,主要研究方向:电力变换控制技术。E-mail: zhangqiang@hrbeu.edu.cn
王言畅(1993—),男,硕士研究生,主要研究方向:新能源发电系统中的电力变换技术。E-mail: 844312111@qq.com
王 锐(1991—),女,硕士,主要研究方向:供应链数字化系统平台。E-mail: wangruixuchen@163.com
(编辑鲁尔姣)
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
山东冶金(2019年3期)2019-07-10
通信电源技术(2018年5期)2018-08-23
消费导刊(2018年10期)2018-08-20
电子制作(2016年15期)2017-01-15
中国环境监察(2016年7期)2016-10-23
铁道通信信号(2016年10期)2016-06-01
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11