
基于RSSI的室内定位技术综述
2018-09-17 05:20张宝山童紫原唐守锋童敏明徐朝亮
计算机时代 2018年7期
张宝山 童紫原 唐守锋 童敏明 徐朝亮
摘 要: 目前的室内定位系统还存在很多问题,如:系统成本高、定位精度低、不能适应室内环境的多变性等,这些问题也成为了现阶段室内定位技术研究的热点。基于RSSI的定位技术是解决这些问题的有效途徑之一。围绕RSSI定位技术,从RSSI的基本原理入手,分析了RSSI实现定位过程中所用的算法,比较它们的优缺点,并对现阶段室内定位技术所面临的难点问题进行分析总结。
关键词: 无线传感网络; RSSI; 室内定位; 算法综述; 研究热点
中图分类号:TP399 文献标志码:A 文章编号:1006-8228(2018)07-01-04
Abstract: The current indoor positioning system still exists many problems, such as high system cost, low precision, complex and changeable indoor environment, etc., these problems become the focus of indoor positioning technology research at present stage. RSSI based positioning technology is one of the effective ways to solve these problems. Based on RSSI localization technology, this paper starts with the basic principles of RSSI, analyzes the algorithms used in the localization process of RSSI, compares their advantages and disadvantages, and the problems of indoor positioning technology are analyzed and summarized.
Key words: wireless sensor network; RSSI; indoor positioning; algorithm overview; research hot spot
0 引言
对于室外环境,全球定位系统(GPS)能提供较高精度的定位服务。但对于室内环境以及封闭环境来说,GPS信号就衰减严重,根本无法使用。而随着无线传感器网络(WSN)的发展,这一问题可以得到有效的解决。1992年,英国剑桥的Active Badge系统是最早期的室内定位系统之一;2002年,加利福尼亚大学的Calamari系统同时采用了TOA和RSSI两种技术进行定位;目前国内对室内无线定位系统十分重视,室内定位技术与算法已经是现阶段研究的热点,而室内定位的重点问题则是如何降低系统的成本,以及如何提高定位的精度。
室内定位技术的算法分类有很多种方法。其中,根据是否测量节点间的实际距离,可分成基于测距定位算法和非测距定位算法。相较于非测距定位算法而言,基于测距定位算法的测量精度比较高,但它对于系统的硬件要求也比较高。具体来说,非测距定位算法主要分为三类,即近似三角形内点测试法(APIT)[2]、DV-Hop算法[3]以及质心法[4]等。这些算法可以利用估计距离来计算未知节点的位置,而基于测距定位算法有信号达到角度法(AOA)[5]、信号达到时间法(TOA)[6]、信号达到时间差法(TDOA)[7]、RSSI[8]等算法,这些算法需要测量节点间的实际距离。在这些定位算法中,对硬件要求都比较高,AOA算法要有感知信号方向的硬件设备,TOA算法对时钟同步有严格要求,而TDOA算法要求节点配有超声波。而基于RSSI的定位算法是一种低功耗且低成本的定位技术,其系统的硬件节点基本可以利用射频信号来实现无线通信功能,具有很好的应用前景。本文主要对基于RSSI的一系列算法进行详细的阐述与分析。
1 RSSI处理
1.1 RSSI的获取
RSSI(Received Signal Strength Indication)指的是接收信号强度指示,用来判定链接质量以及是否增大广播发送强度。通过检测接收的RSSI信号强弱来估计信号发射点和接收点的距离,然后根据估计的距离来进行计算,最终得到未知节点的位置。RSSI的获取可以有多种方式,例如WIFI、蓝牙、RFID、ZigBee等,它们的性能对比如表1所示。
距离估计法:首先通过信号的参数计算已知节点与未知节点的距离或者角度等信息,其次利用几何方法计算未知节点的估计位置。
邻近法:当定位目标进入事先布置好的天线范围内时,会被天线检测到,从而可以知道物体的大致位置,此方法需在室内布置密集的天线网格,容易实现,但精度不高。
场景分析法:场景分析法又称作位置指纹定位法。它主要分为两个步骤:首先大量采集区域内的环境信息;然后利用匹配测量值与采集好的指纹集来估计未知节点的位置。它主要分为K最近邻(KNN)和概率统计法等。
1.2 室内路径损耗模型
根据研究表明,在实际应用的环境中,信号强度会随着传输距离的增加而衰减,所以不能用精确的关系式来表示,而信号强度和位置之间的近似关系通常可以用路径损耗模型来表示:
式⑴中,d是发射源和接收方之间的距离;RSSIPL是经过距离d后信号强度的衰减量;d0指参考距离,一般取1m;RSSI0和α是由校准数据确定的常数,它们主要依赖于周围环境等不定因素,其中RSSI0为定位节点与参考节点之间的距离d=1m时测得的RSSI,α为信号衰减因子,一般设为2~4;误差项e是指由多路径传播、反射、干涉等引起信号强度波动的随机变量,在实际应用中一般不予考虑。简化公式后得到式⑵。
1.3 RSSI滤波
由于在实际环境中存在着多径效应、非视距以及障碍物等多种随机因素,会使得实际获取的RSSI值有很大的波动性,这为下一步的定位过程带来了很大的麻烦,所以我们需要对测得的RSSI值进行平滑滤波优化处理[9]。比较常用的滤波算法有:均值滤波、递推平均滤波、中值滤波、狄克逊检验法滤波、高斯滤波、速度常量滤波以及卡尔曼滤波等等。下面介绍三种常用来平滑RSSI值的滤波方法:均值滤波、高斯滤波和卡尔曼滤波。
均值滤波:节点接收到另一节点的多组RSSI值之后,用下式⑶求出它们的几何平均值,即为滤波后的结果。
高斯滤波:由于实际环境存在的各种干扰因素,会使未知节点接收到的多组RSSI值产生一些小概率误差。通过高斯函数筛选高概率发生区的RSSI值作为的有效值,再求它们的算数平均值。这样就能够大幅度地降低小概率大干扰的RSSI值对整体测量数据的影响,从而一定程度上的提高了定位的精度。RSSI近似服从(μ,δ2)的高斯分布,其概率密度函数如公式⑷所示。
通过公式⑷和⑸可求出以及方差。为了减少小概率事件对RSSI的影响,根据高斯函数高概率发生区(选择概率大于0.6的范围),对公式⑷作以下限制:
然后将符合上式⑺的RSSI值放入数组中,最终可通过公式⑻得到RSSI信号的最终优化值。
卡尔曼滤波:最初的经典卡尔曼滤波只适用于线性系统的滤波,随着算法研究的进一步深入,适合非线性系统的卡尔曼滤波被提出,其中包括无迹卡尔曼滤波(UKF),扩展卡尔曼滤波(EKF)等。本文主要介绍常规的线性卡尔曼滤波算法。卡尔曼滤波算法采用信号与噪声的状态空间模型,使用前一时刻的估计值以及当前时刻的观测值对状态变量的估计进行更新,以算得当前时刻的估计值。它可以分为两个阶段:预测阶段和校正阶段。预测阶段是根据上一时刻的状态估計下一时刻的状态;校正阶段则是利用当前时刻的估计值与观测值,估计出最优的状态。具体过程如下。
预测阶段:状态预测与误差矩阵预测,分别以公式⑼和公式⑽表示。
校正阶段:卡尔曼增益计算、状态校正(其输出就是最终滤波的结果)以及误差矩阵更新,它们分别对应公式⑾~⑿。
在上面各式中,Xk表示k时刻的RSSI值;A、B为系统参数;Uk为k时刻外界对系统的作用;Q表示预测噪声协方差矩阵;Pk为误差矩阵;R为测量噪声协方差矩阵;H为观测矩阵;Kk表示k时刻卡尔曼增益;Zk为k时刻的观测值。
总的来说,均值滤波算法简单,易实现,但精度不高,效果不是很理想。相比之下,高斯滤波算法效果很好,但算法复杂,计算量大。而卡尔曼滤波可以很好的去除噪声,但它更适用于运动中的物体。在实际应用中,我们可以根据实际情况,选择合适的算法或混合多种算法,以达到理想的滤波效果。
2 定位算法
基于RSSI的定位算法很多,像三角/三边质心算法、加权质心算法、最小二乘法[10]、双曲线法、位置指纹算法、融合算法以及各种改进衍生算法等等。下面就介绍几种基于RSSI的基本或比较常用的算法。我们假设三个已知节点的坐标分别为(x1,y1)、(x2,y2)、(x3,y3),未知节点的坐标为(x,y),未知节点到已知节点的距离分别为d1、d2、d3。
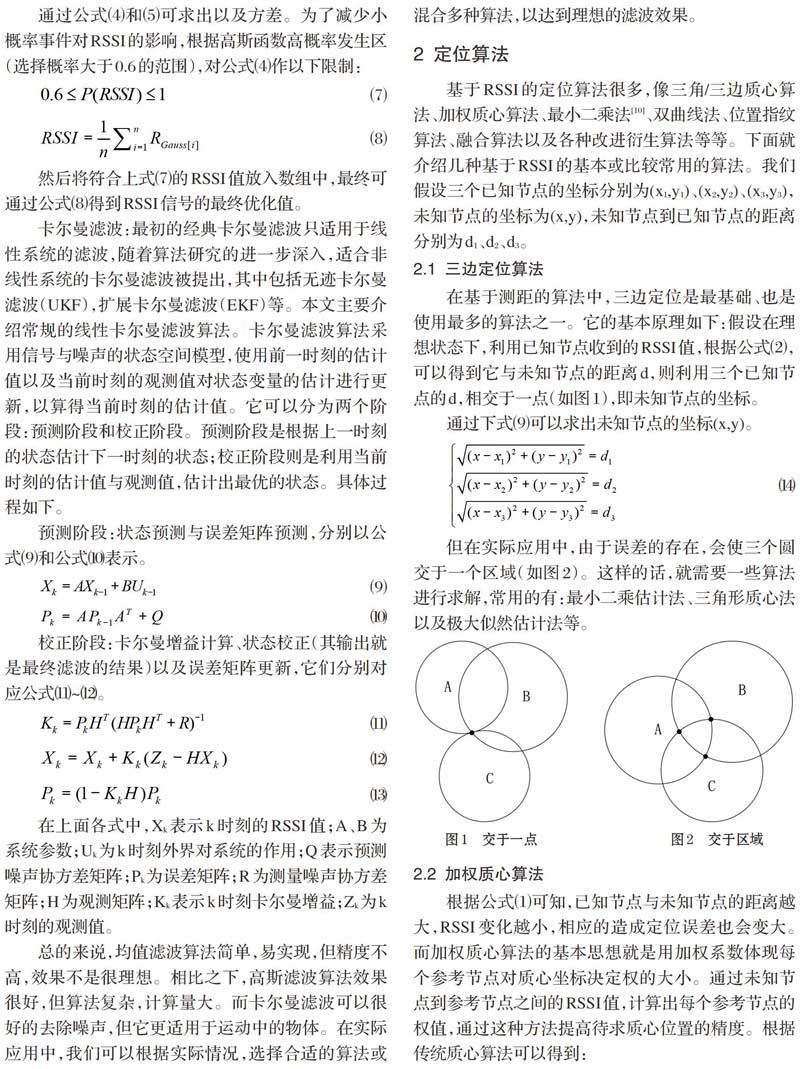
2.1 三边定位算法
在基于测距的算法中,三边定位是最基础、也是使用最多的算法之一。它的基本原理如下:假设在理想状态下,利用已知节点收到的RSSI值,根据公式⑵,可以得到它与未知节点的距离d,则利用三个已知节点的d,相交于一点(如图1),即未知节点的坐标。
通过下式⑼可以求出未知节点的坐标(x,y)。
但在实际应用中,由于误差的存在,会使三个圆交于一个区域(如图2)。这样的话,就需要一些算法进行求解,常用的有:最小二乘估计法、三角形质心法以及极大似然估计法等。
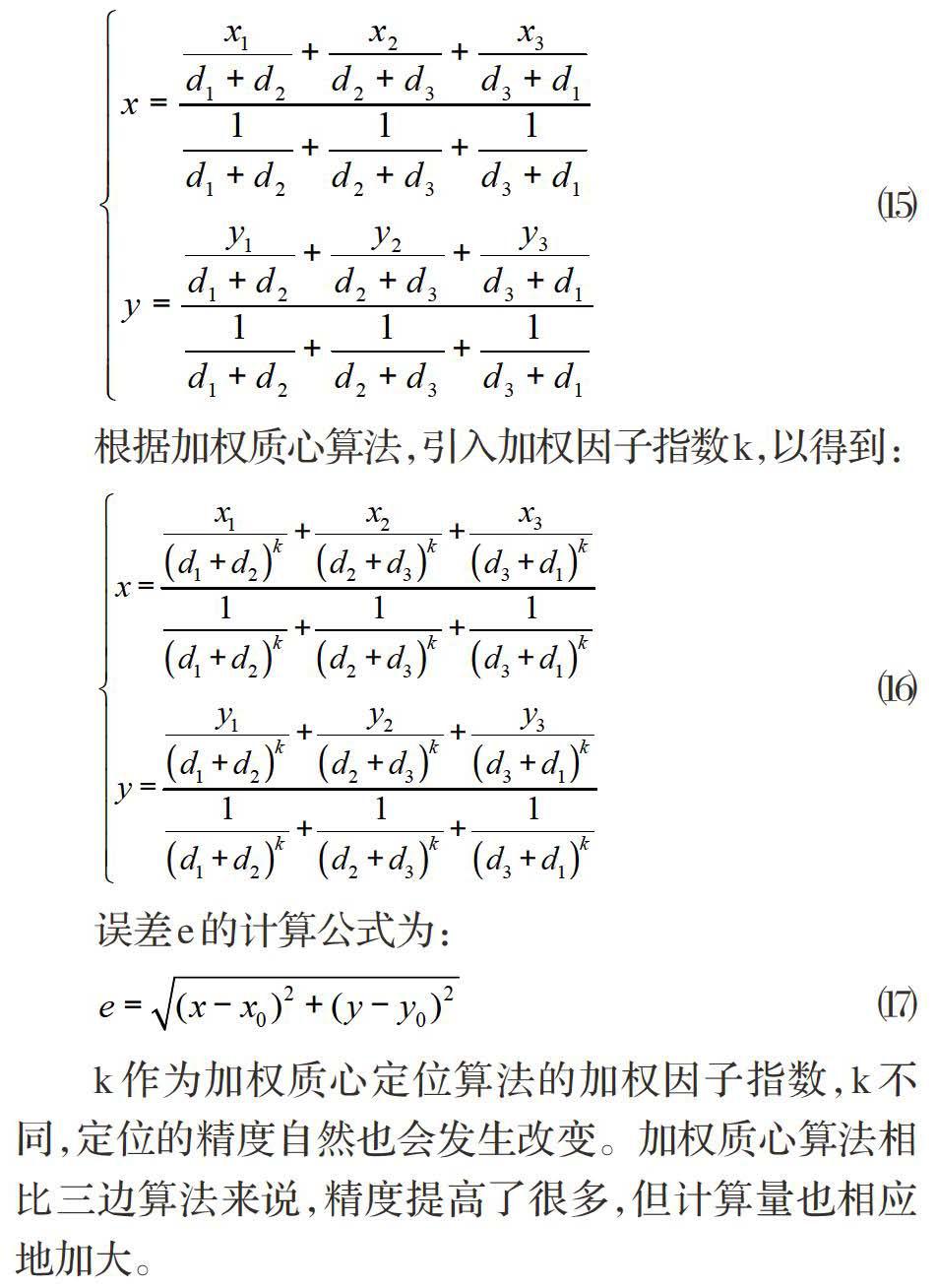
2.2 加权质心算法
根据公式⑴可知,已知节点与未知节点的距离越大,RSSI变化越小,相应的造成定位误差也会变大。而加权质心算法的基本思想就是用加权系数体现每个参考节点对质心坐标决定权的大小。通过未知节点到参考节点之间的RSSI值,计算出每个参考节点的权值,通过这种方法提高待求质心位置的精度。根据传统质心算法可以得到:
k作为加权质心定位算法的加权因子指数,k不同,定位的精度自然也会发生改变。加权质心算法相比三边算法来说,精度提高了很多,但计算量也相应地加大。
2.3 位置指纹定位算法
位置指纹定位的基本思想:根据所在位置和所有已观测到的位置测量值(指纹集)相匹配,接着根据所比较的情况进行定位。它是一种基于学习的模型,运用模式识别,可以将信号的不确定性考虑在内,在定位效果方面令人满意。我们在使用位置指纹算法来进行定位时,一般分两个阶段:离线阶段与在线阶段。离线阶段需要进行多次采集区域内各位置上的“指纹”数据(RSSI),并构建一个数据库,即训练集;在线阶段中,定位系统会根据未知节点接收的RSSI值来估计它所在的位置。基于位置指纹的定位通常有两种算法。一种是确定性的算法,比较信号特征和存在指纹库中的预先计算出来的统计值;另一种是概率性的算法,即计算信号特征属于某个分布的可能性。
位置指纹定位算法的定位精度较高,但是给未知环境建立定位模型与校准的工作量相当的大。除此以外,当实际环境改变后,需要确定新的定位模型,维护成本将提高。
2.4 融合定位算法
经过研究表明,利用多数据进行融合处理可以获得比单个数据源更加准确、可靠的估计和定位。在测距定位系统中,接收到的RSSI信号会由于室内环境的不确定性或多径效应而出现随机变化;而在行人航迹推算(PDR)定位系统中,长时间的漂移会产生误差的累积效果。由此可以融合RSSI测距的室内行人航迹推算算法[11],以卡尔曼滤波算法实现两者定位信息的融合,这样可以获得系统的最优定位结果。此外,还可以将TDOA/AOA、地磁、惯导[19]、地图等技术与RSSI定位融合起来,进行定位。
融合定位算法融合了多种传感器的信息以及多种定位技术来进行综合定位,具有优势互补的特点,从而提高了定位系统的精度以及健壮性,降低了室内定位系统的成本,这种算法也是室内定位的研究热点之一。
3 结束语
本文主要介绍并比较了在室内定位过程中所用到的一些滤波算法、定位算法等。目前室内定位技术的精度不断提高,但其尚未被广泛地应用,主要原因还是由于环境的复杂、定位精度与系统成本难以兼顾等等。故找出一套精度高、成本低、普適性强的技术方案是室内定位技术未来的发展趋势,同时综合利用各种定位技术及信息的融合定位也将是解决目前室内定位难点问题的可行性方案之一。而随着物联网、通信技术,以及计算机视觉等技术的快速发展,未来的室内定位技术也不断朝着智能化、精准化、网络化的方向发展。
参考文献(References):
[1] 孙利民,李建中,陈渝,朱红松.无线传感器网络[M].清华大学出版社,2005.
[2] 苗少卿,高航,赵国安.无线传感网络APIT定位算法的研究与改进[J].单片机与嵌入式系统应用,2015.15(7):38-41
[3] 刘三阳,胡亚静,张朝辉.基于RSSI测距的DV-Hop算法[J].控制与决策,2017.32(10):1900-1904
[4] 刘政.权重和误差双修正的质心定位算法[J].自动化仪表,2014.35(7):14-17
[5] Niculescu D, Nath B. Ad hoc positioning system (APS) using AOA[J]. Proceedings-IEEE INFOCOM,2003.3(2):1734-1743
[6] Alavi B, Pahlavan K. Modeling of the TOA-based distancemeasurement error using UWB indoor radio measurements[J].IEEE Communications Letters,2006.10(4):275-277
[7] Ma W K, Vo B N, Singh S S, et al. Tracking an unknowntime-varying number of speakers using TDOA measurements: a random finite set approach[J]. IEEE Transactions on Signal Processing,2006.54(9):3291-3304
[8] 倪巍,王宗欣.基于接收信号强度测量的室内定位算法[J].复旦学报(自然科学版),2004.43(1):72-76
[9] 张铮,饶志训,黄志峰.无线传感器网络中RSSI滤波的若干处理方法[J].现代电子技术,2013.20:4-6
[10] 陶为戈,朱昳华,贾子彦.基于RSSI混合滤波和最小二乘参数估计的测距算法[J].传感技术学报,2012.25(12):1748-1753
[11] 郑学理,付敬奇.基于PDR和RSSI的室内定位算法研究[J].仪器仪表学报,2015.36(5):1177-1185
猜你喜欢
职教论坛(2016年27期)2017-01-05
科技视界(2016年25期)2016-11-25
电脑知识与技术(2016年25期)2016-11-16
考试周刊(2016年85期)2016-11-11
软件导刊(2016年9期)2016-11-07
科技视界(2016年18期)2016-11-03
电脑知识与技术(2016年21期)2016-10-18
中国新通信(2016年16期)2016-10-18
中国教育信息化·基础教育(2016年9期)2016-10-18
科技视界(2016年17期)2016-07-15
