
1种副孔正交型超声速5孔探针的设计与应用
2018-09-17 06:09冯旭栋
航空发动机 2018年5期
张 有 ,吴 锋 ,2,冯旭栋 ,尹 骥
(1.中国航发四川燃气涡轮研究院航空发动机高空模拟技术重点实验室,四川绵阳621703;2.西北工业大学能源与动力学院,西安710072)
0 引言
在超声速流场中,激波、膨胀波、边界层等影响因素会造成气流压力大小和速度方向等参数变化。准确获取流场的气动参数,对于超声速流场试验设备(超声速喷管、叶栅)的设计和评定具有重要意义。目前用于超声速流场定量测量的工具主要有气动探针、激光多普勒测速仪、粒子成像测速仪和热线风速仪等[1-4]。相比之下,气动探针具有价格便宜,设备和使用方法简单,对环境要求低,精度高等优点。
气动探针主要有总压探针、静压探针和方向探针等,可获取总压、静压、动压、气流速度和方向等气动参数。通过气动优化和校准试验,总压和静压探针可准确测量前4项参数,但不能确定气流方向。方向探针是在总压探针的基础上,通过对称成对布置多个与气流成一定角度的测压孔[5],完成气流方向角和速度等参数的测量。根据测压孔数量的不同,方向探针(或多孔探针)有2、3、4、5和7孔探针等类型。方向探针应用广泛,Bryer等[6]针对7种不同的方向探针开展了吹风试验,研究各探针的使用方法和适用范围,以确定用于流场速度和方向测量的最优气动外形;Depolt和Koschel等[7-8]采用数值分析方法对探针测压头和支杆的气动外形进行优化,研究了测压头几何参数对探针校准系数的关系;Gundogdu、Morison、侯敏杰等[9-16]针对方向探针校准开展了大量研究。
5孔和7孔探针均可实现3维流场的精细化测量,虽然7孔探针可测量的气流角度更大,但存在校准难度大、数据处理繁琐等问题。5孔探针通过测量5个孔的压力值,利用已校准的数据库和局部插值,能够精确地确定速度的大小和方向、总压和静压、Ma等流场性质。常用5孔探针测压头有球形和锥形2种,球形探针主要用于亚声速流场的测量,而锥形探针在超声速流场的测量中应用广泛。5孔探针在国内发展较早,多侧重于亚声速5孔探针的研究,而超声速5孔探针的相关研究较少[12-15]。
本文选择5孔探针对超声速喷管出口3维流场进行Ma和方向角的标定。
1 探针设计
1.1 气动原理
超声速5孔探针是利用圆锥体绕流特性(如图1所示)来确定流场的流动特性参数。在零攻角均匀无旋流场中,根据 Taylor-Maccoll[17]理论,如图 1(a)所示的理想圆锥表面速度分布为

式中:r和θ为球面坐标系的径向和切向单位矢量;Vr为径向速度分量,为切向速度分量;k为绝热指数。

图1 圆锥探针绕流特性
经过无量纲化后,速度分量Vr、Vθ与圆锥表面Mac的关系为

根据Depolt等[7]的研究,探针的圆锥半角与方向特性系数具有很强的相关性,方向特性系数梯度直接影响探针的测量角度空间分辨率。随着圆锥半角的增大,探针的空间分辨率提高。在超声速流场中,圆锥半角的增大却使探针前端更容易形成脱体激波,故圆锥半角的选取还要考虑流场Ma范围。根据圆锥扰流气体动力学理论,20°半锥角产生脱体激波的最大Ma=1.18(跨声速)。综合考虑测量角度分辨率、气流Ma和制造难度等因素,圆锥半角选为20°。
由于测压孔的存在,实际上5孔探针测压头为类似圆台形状(如图1(b)所示)。在超声速流场中,圆台会使探针前端产生脱体弓形激波,中间部分正激波的波前波后压力与Ma关系[18-19]为

式中:p为来流静压;p0为正激波后的总压;Ma1为来流Ma。
在5孔探针设计中,为了保证测量精度,4个副孔在圆锥母线上的位置既要避开前端激波的影响,又不能对流场造成新的扰动。通过研究圆锥壁面的静压分布,可以对激波后流场的特性进行分析,从而指导副孔的气动布局。为此,定义圆锥壁面静压系数
式中:pc为圆锥面静压;ρ1为来流密度;V1为来流速度。
根据如图1(b)所示的模型(圆台直径0.6 mm,圆锥半角为20°),采用数值计算方法获得了Ma=1.1、1.5、2.0的3种工况下圆锥表面静压系数分布曲线,如图2所示。从图中可见,与理想的测压头相比,经过圆台面的超声速气流会膨胀加速,造成圆锥面前端静压分布有1个低压区。在圆锥母线长度的20%~90%区间内,静压分布较平缓,差值较小,故将5孔探针的4个测压副孔布置在该区间内。
1.2 结构设计
副孔正交型超声速5孔探针结构如图3所示。从图中可见,4个副孔轴线垂直于圆锥面母线,在圆锥面上的周向角分别为 0°、90°、180°和 270°,测压头的圆锥半角为20°。设计了直径分别为6、4、2 mm的测压头(如图4所示),采用不锈钢材料进行电火花(EDM)穿孔加工。直径4 mm的5孔探针测压孔直径为0.4 mm,副孔距离探针前端面3.0 mm(x/L=50%),副孔深0.5 mm;探针支杆长140 mm。
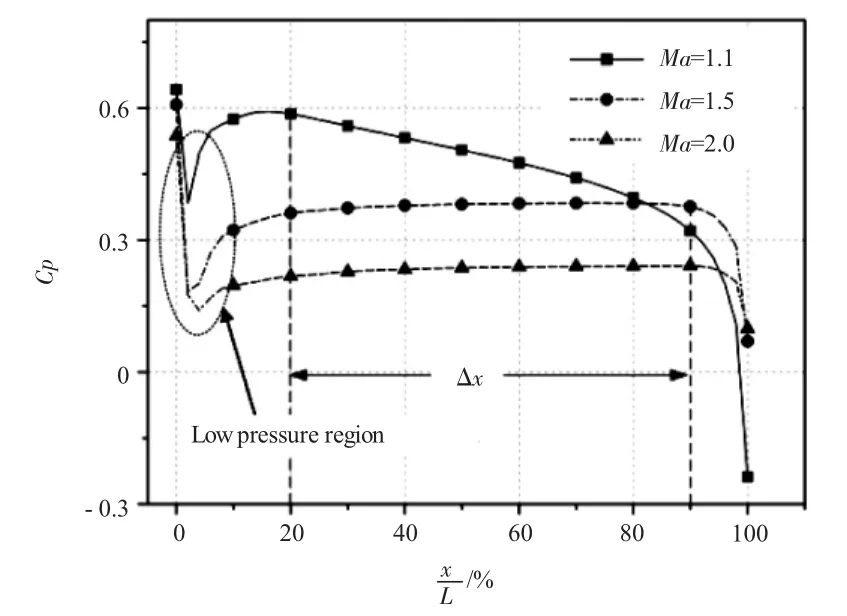
图2 圆锥表面静压系数分布

图3 5孔探针结构
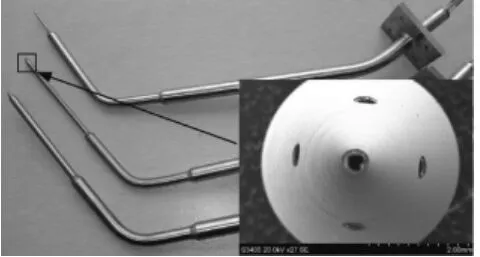
图4 探针实物
根据扫描电子显微镜图像显示(图4,放大100倍),直径4 mm的5孔探针测压孔对称性较好,仅竖直方向的2个副孔周向角度有一定偏差(约2°)。测压孔微观上均存在少量毛刺,会对流场测量造成一定影响。5孔探针作为接触测量工具,为了降低对流场的影响程度,应尽量减小5孔探针的外形尺寸。文献[7]对不同直径探针进行研究,建议测压头尺寸最好不小于2 mm,测压孔直径不小于0.2 mm,否则将大幅度延长测量压力的响应时间。
针对如图4所示的5孔探针,在超声速风洞中采用背景导向纹影技术(BOS)开展超声速扰流特性的研究,验证了测压头和支杆结构设计的合理性。文献[11]中详细描述了验证试验中BOS技术的原理、设备布局和试验方案。试验在Ma=1.6下,将5孔探针置于风洞出口,正对来流如图5所示。从图中可见,在测压头、支杆和支杆弯段处各形成了1道斜激波和膨胀波。其中,第 1、2道斜激波(shock1、shock2)为锥形激波,第3道斜激波(shock3)为支杆弯段形成的平面斜激波。从宏观上看,各激波与膨胀波之间无相互干扰。探针头部形成的shock1与图1(a)的激波结构更相似。图中还存在由风洞喷管出口型面不连续引起的多道弱激波。
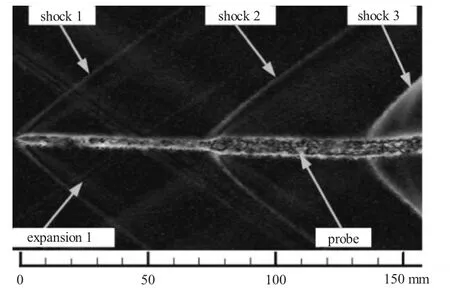
图5 5孔探针背景导向纹影

图6 5孔探针编号和坐标
2 校准方法
2.1 参数定义
在小流动角情况下,5孔探针中心孔压力P2最大;随着流动角度增大,最大压力由中心测压孔逐渐转移到正对横向气流的测压孔。根据5个测压孔的压力高低,将流动空间划分为5个区。中心孔编号为第2孔所对的流动空间称为内区,其他4个区称为外区,每个区各占1/4的扇形空间,5孔探针编号和坐标如图6所示。5孔探针使用中有2种坐标系以确定来流方向,本文采用迎角α和侧滑角β来确定气流方向角,迎着气流看,向下迎角为正,向右侧滑角为正[12-17]。
在5孔探针校准中,按照式(5)~(8)定义总压系数Ko、静压系数Ks、方向特性系数Kα和Kβ

式中:P1~P5分别为5个测压孔压力; 为风洞来流总压;Ps为风洞出口静压。
2.2 风洞校准
5孔探针分别在直流开口式亚声速风洞和超声速风洞中完成校准,亚声速风洞校准范围Ma=0.2~1.0,超声速风洞校准范围Ma=1.0~2.0,2个风洞均可实现α=±30°、β=±20°的调节与控制。风洞流场校测结果表明,在所有试验Ma下,风洞出口实际使用区域内流场指标满足GJB 1179-91的要求。校准方法如下:
(1)Ma=0.4、0.6、0.8、1.0 的校准试验在亚声速风洞上进行;Ma最大偏差为0.009,压力测量误差为0.1 kPa。
(2)在 Ma=1.203、1.304、1.395、1.480、1.587、1.744下的校准试验在超声速风洞上进行;Ma最大偏差为0.0092,压力测量误差为0.2 kPa。
(3)方向角校准误差为 0.3°,校准范围为 α=0°、±5°、±10°、±15°;β=0°、±5°、±10°、±15°。
3 试验结果
3.1 风洞校准结果
校准数据按照式(5)~(8)进行处理,得到5孔探针的方向特性和总静压特性。在Ma=1.4和Ma=1.74下的方向特性曲线如图7所示。从图中可见,在不同Ma下方向特性系数基本一致,具有较高的对称度;方向角在-15°~15°范围内变化时,方向特性系数在-0.8~0.8之间变化;不论α还是β,方向角每变化5°,相应的方向特性系数变化的平均值为0.21。

图7 不同Ma下的方向特性曲线
方向角系数随着Ma的变化规律如图8所示。总体来说,随着Ma增大,方向特性系数的绝对值单调降低,即方向特性系数朝着原点(α=0°、β=0°)靠拢。在Ma=1.3附近,迎角系数曲线有一定偏折(如图8(a)所示),最大偏折发生在α=-15°时,且该偏折随着迎角的增大而逐渐减小,可能是在该Ma下校准风洞流场品质的影响造成的。
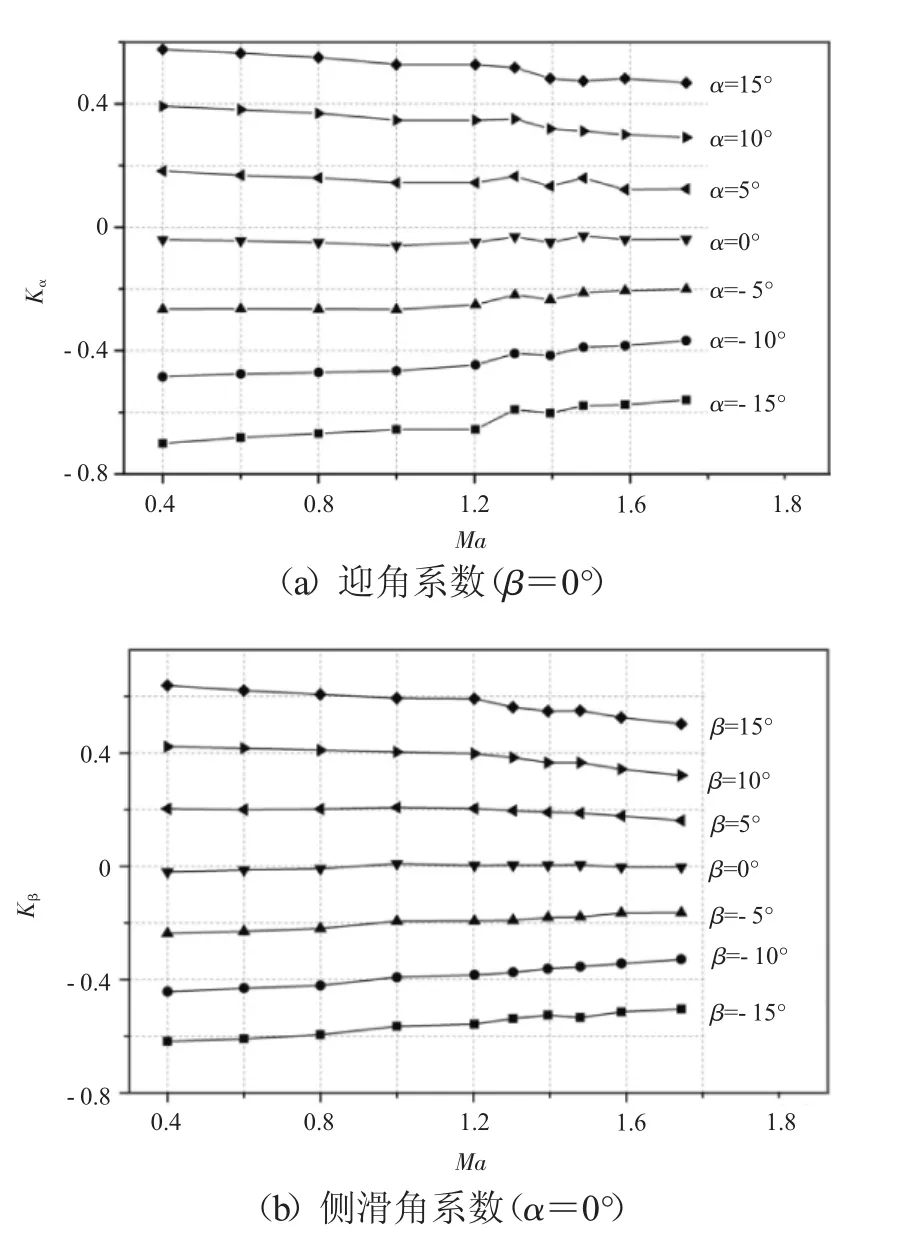
图8 方向角特性随Ma变化趋势
总压特性如图9所示。从图中可见,总压系数均小于0,在亚声速范围内,随着Ma的增大,总压系数越大,在Ma=1时,总压系数最大(接近0);在超声速范围内,随着Ma的增大,总压系数越小,且变化梯度越大。在相同Ma下,α=0°、β=0°处的总压系数最大,在 α=-15°、β=15°处的总压系数最小。


图9 总压特性
静压特性如图10所示。从图中可见,静压系数随Ma的变化规律与总压系数一致,均先增大后减小(非单调变化)。在Ma=1时静压系数有1个突变,在亚声速时,静压系数大于 0;在超声速时(Ma≥1.2),静压系数小于 -1。在相同 Ma 下,α=0°、β=0°处的静压系数最大,α=-15°、β=15°处的静压系数最小。
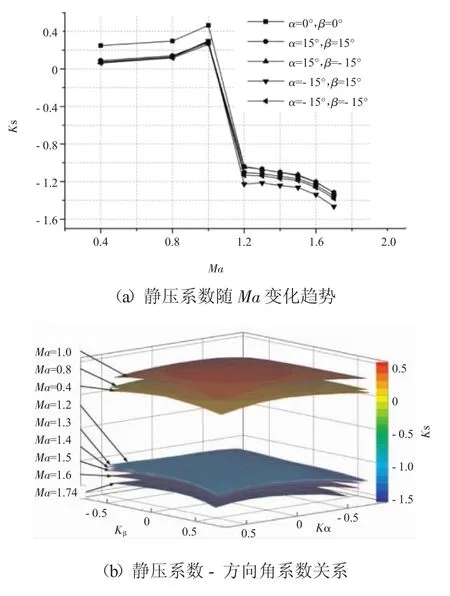
图10 静压特性
基于误差传递理论,对风洞校准试验进行误差源分析与量化,得到了各系数(式(5)~(8))的校准试验误差,如图11所示。总的来看,随着Ma增大,特性系数校准误差降低。由于探针校准分别在2个风洞中进行,故特性系数校准误差在Ma=1.0时有转折。
直孔和副孔正交型5孔探针的对比如图12所示。2种类型5孔探针在Ma=1.744时的方向特性曲线如图12(a)所示。从图中可见,在小角度条件下(±15°),副孔正交型5孔探针1与直孔型5孔探针2的方向特性基本类似。2种类型5孔探针副孔宽度的变化规律(测压孔直径为0.4 mm)的对比如图12(b)所示。从图中可见,随着圆锥半角θ的减小,直孔型副孔宽度L迅速增加,而正交型副孔宽度L始终保持不变(0.4 mm)。对于直孔型探针,在大Ma和大气流方向角的条件下,较大的宽度L会影响副孔压力测量精度,从而造成Ma和方向角测量的偏差。

图11 5孔探针特性系数校准误差

图12 2种5孔探针的对比
3.2 数值分析
模拟探针超声速校准试验过程的5孔探针计算模型和网格如图13所示。喷管出口直径为50 mm,外流场长800 mm、直径为200 mm,5孔探针直径为4 mm,计算模型长30 mm。采用六面体结构化网格,网格数为1500万,5孔探针壁面网格尺度为0.005 mm。计算模型边界条件(喷管进口总压、方向角、环境压力)与风洞校准试验的一致,采用SST k-ω湍流模型。

图13 5孔探针计算模型和网格
在正迎角(Ma=1.744,β=0°)情况下探针壁面的总压分布如图14所示。从图中可见,迎角为0时,探针正对来流,驻点位置在中心孔上,因此中心孔的静压高于侧面的4个小孔。随着迎角逐渐增大到15°,外区第5孔(迎风面)的压力值逐渐高于外区其他副孔压力值。气流以子午面(ZX平面)为对称面向两边流动,越接近背风面,副孔的静压值越小。随着迎角的增大,外区第5孔后形成的局部尾迹区逐渐减小;中心孔2背风面的低压区越来越大。
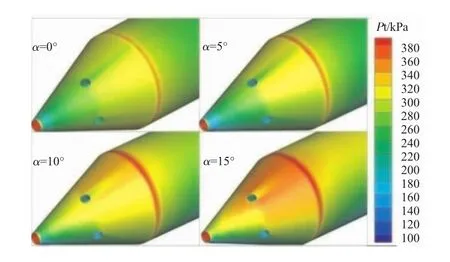
图14 探针壁面总压分布
在负迎角下(Ma=1.744,β=0°)探针子午面(ZX平面)的Ma分布如图15所示。从图中可见,在迎角为0时,中心孔前端形成了局部的正激波,激波后Ma<1,4个副孔附近的Ma较高(1.4左右)。随着迎角的减小,在外区第4孔(迎风面)附近形成较强的斜激波并逐渐演化至正激波,波后Ma从1.4降低至1.0左右。而外区第5孔附近的斜激波逐渐减弱,波后Ma从1.4增加至1.6。受测压头尾迹的影响,背风面静压较低,气流在此加速,使得背风面的Ma高于迎风面Ma。
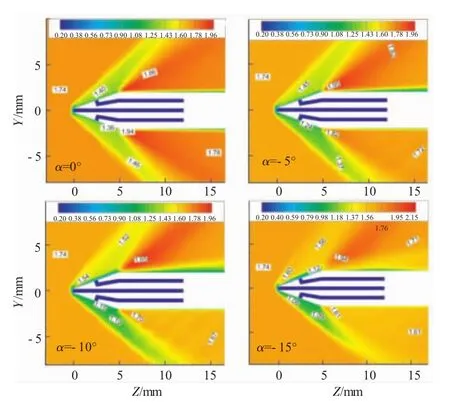
图15 子午面Ma分布
对5孔探针静压/总压比与Ma的关系进行研究,定义静压和总压的比值CM

数值计算的CM与Ma、迎角的关系(α=-15°~15°,β=0)如图 16 所示。从图中可见,同一 Ma下,CM不受气流方向角α的影响,基本保持不变;不同Ma下,CM曲线基本平行。
CM校准试验值、仿真值与Ma的关系(α=0°、β=0°)如图17所示。从图中可见,随着Ma的增大高,CM单调降低,该值可作为流场测试中Ma判断的辅助参数。在亚声速阶段,CM校准值和仿真值差别较小,当Ma>1.3以后,CM差别越来越大,可能的原因是仿真模型缺乏对激波与附面层相互干扰流动细节的捕获,需要在后续工作中继续深入研究。
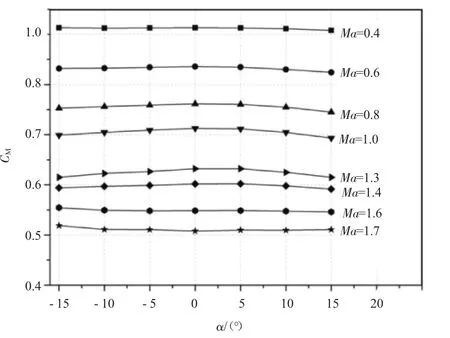
图16 CM与Ma/迎角的关系

图17 CM校准值和仿真值的对比
4 5孔探针的应用
在Ma连续调节超声速喷管流场标定试验中(如图18所示),采用副孔正交型5孔探针完成了喷管出口5个截面共315个坐标点的标定。Ma标定范围为1.2~1.8,俯仰角度为±6°。5孔探针与自动位移机构配合使用,实现了对喷管出口不同截面进行Ma/方向角的自动测量和空间流场的连续标定。
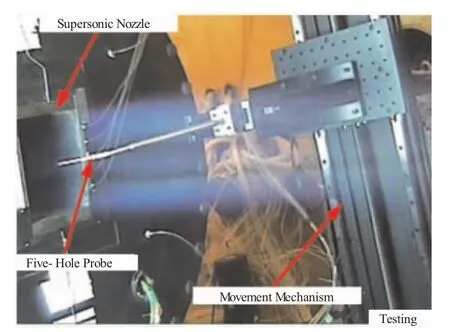
图18 超声速喷管流场标定试验
由于5孔探针的测量原理是通过5个孔的压力来插值反算对应的Ma及气流角等参数,所以在对测量数据处理前需进行多项式拟合。采用的最小二乘多项式插值方法使得拟合曲线并不一定通过校准数据点,在经过多次迭代后,会产生1个算法导致的误差。为了减小这种差异在流场测量中的影响,采用线性补偿的方法对计算Ma进行一定的修正。
喷管出口Ma=1.6、α=3°时子午面Ma标定结果和方向角标定结果如图19所示。从图中可见,喷管出口均匀区(虚线内)受附面层影响,其高度小于喷管高度;均匀区后出现菱形膨胀加速区,Ma快速增大到1.72。受出口膨胀波影响,气流会产生方向角(右图),范围为±3°。

图19 超声速流场方向角标定结果
同时,采用总压探针对喷管出口流场Ma和边界层进行标定,并与5孔探针标定结果进行对比,如图20所示。总压探针的Ma通过波前波后总压比值计算出,假设喷管为等熵膨胀过程,则波前总压可取喷管进口总压,波后总压为总压探针获取的压力。由于流场还存在气流方向角,故总压探针测量的Ma偏低,且边界层分布不均匀。相反,5孔探针的Ma测量结果更能反映喷管出口的真实流场。由于总压探针上布置了多根测压管,移动测量过程中相互影响较大,造成总压探针的测量Ma呈锯齿状。
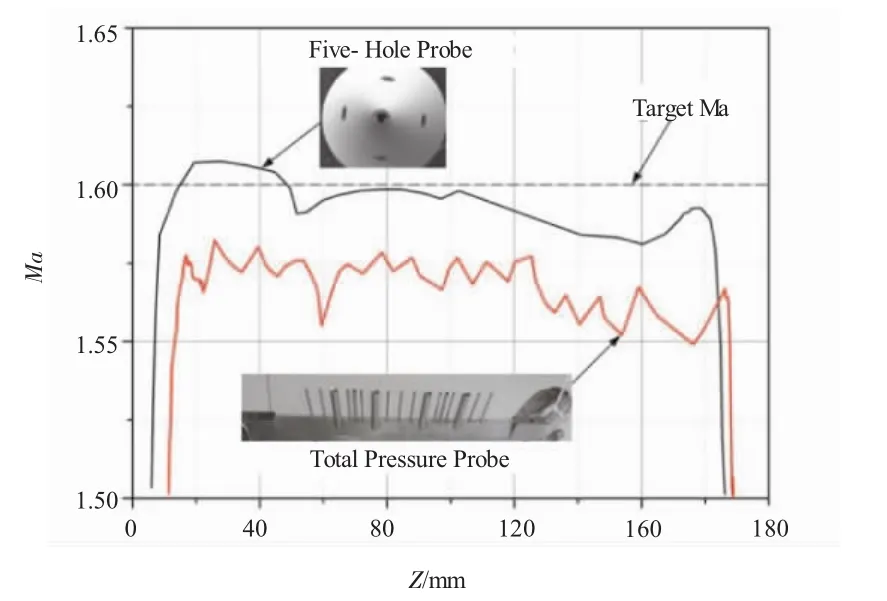
图20 5孔探针与总压探针处理结果对比
5 结论
根据圆锥体超声速绕流特性研究结果,设计了副孔正交型超声速5孔探针,风洞校准和数值模拟结果表明该探针具有良好的气动特性。在Ma连续调节超声速喷管流场标定试验中,本文设计的5孔探针Ma测量结果比总压探针测量结果更接近喷管实际Ma,表明其在带有方向角的超声速流场标定中具有较高的测量精度。
在后续的工作中需要针对以下2个问题开展研究:(1)由于在亚声速风洞和超声速风洞中分开进行5孔探针校准,使得探针在跨声速(1.0≤Ma≤1.3)段的性能有所降低,需改进校准方法;(2)在大气流角(>30°)条件下,进行副孔正交型和直孔型5孔探针的气动特性和测量精度对比研究。
猜你喜欢
建材发展导向(2022年20期)2022-11-03
建材发展导向(2021年15期)2021-11-05
建材发展导向(2021年9期)2021-07-16
建材发展导向(2021年9期)2021-07-16
航空发动机(2021年1期)2021-05-22
航空学报(2021年3期)2021-03-27
航空学报(2020年8期)2020-09-10
航空发动机(2020年3期)2020-07-24
航空发动机(2020年3期)2020-07-24
航空工程进展(2020年2期)2020-05-06
