
开-闭环结合控制方式的定日镜跟踪控制策略
2018-09-15 04:31:08郝晓弘郭铁锷汪宁渤
自动化仪表 2018年9期
郝晓弘,郭铁锷,汪宁渤,丁 坤
(1.兰州理工大学电气工程与信息工程学院,甘肃 兰州 730050; 2.甘肃电力公司风电技术中心,甘肃 兰州 730050)
0 引言
定日镜是塔式光热电站中用于收集太阳能并将其聚集到吸热器的装置。其在电站中数量较多、占据场地较大。其控制方式、跟踪精度和稳定性等性能的优劣,将直接影响电站的运行效率。
常见的定日镜跟踪控制方式有开环控制和闭环控制两种[1]。国外已建塔式电站大多采用开环控制方式。开环控制(即程序控制)具有跟踪快速、适用于大型镜场集中调度方便的优点,其缺点是控制算法复杂、存在累积误差[2-5]且较难校正。闭环控制(即传感器控制)通过光电传感器检测定日镜与太阳光线的相对位置,根据偏差控制执行机构运动,从而达到精准聚集太阳光的目的[1,6-8]。这类控制可有效克服累积误差以及镜面偏心导致的跟踪角度修正问题。但其缺点也显而易见:当阴天时,光电传感器无法检测到太阳光,可能导致控制失效;不适用于镜场的集中监控和调度;光电传感器较难实施定日镜的大范围跟踪,并且跟踪的精度受传感器结构、光电池的灵敏度等因素的影响。
由于以上两种控制方式存在不同的优缺点,随着塔式电站对定日镜跟踪精度要求的不断提高,本文提出一种兼具这两种控制方式优点的开-闭环结合的控制方式,并通过试验,验证了该方法的可行性。
1 定日镜结构
根据定日镜设计要求及控制方式,本文研究的定日镜采用双轴结构,即方位角-高度角跟踪。定日镜结构如图1所示。

图1 定日镜结构图
部分入射太阳光线经过定日镜镜面几何中心(几何中心处放置一块小型平面镜)反射后,反射太阳光线穿过闭环光电传感器,投射到吸热器内。当太阳相对运动时,跟踪控制系统通过控制定日镜的镜面角度,使定日镜镜面中心、闭环光电传感器与吸热器接收面中心点(或其他指定目标点)始终成“三点一线”。
2 跟踪控制策略
跟踪控制系统采用开-闭环结合的控制方式。开环进行镜场集中控制,快速调整各定日镜光斑位置。闭环进行跟踪微调,校正和消除定日镜累积误差,实现精准跟踪。对于因阴雨天或光照强度过低而导致的光电传感器失效、镜场能量的优化调度等情况,系统将只进行开环控制,所以开环控制方式也应具有较高的跟踪精度。
根据太阳运行规律和定日镜场经纬度等数据,监控计算机实时计算入射太阳光的方位角和高度角,并将定日镜旋转目标值发送至定日镜控制器,控制器输出脉冲宽度调制(pulse width modulation,PWM)信号,驱动方位角、高度角电机按设定的方向、位置转动。
在一个控制周期内,当定日镜角度反馈值与目标值的偏差大于Emax时,定日镜以快速运行速度Vmax进行快速定位(即开环粗调);当偏差小于Emax时,定日镜进行开环细调,采用增量式PID算法继续跟踪,至此实现开环控制;当定日镜跟踪偏差进一步减小至Emin,达到光电传感器的工作范围内,并且光照强度高于传感器正常工作限制,则切换至闭环控制。闭环微调过程采用闭环跟踪速度Vmin。整个控制周期内采用复合式控制算法,如式(1)所示。当下一次反射太阳光偏离误差产生后,重复以上控制过程,实现定日镜精准跟踪。此外,在闭环控制过程中,如果出现光电传感器失效、镜场需要优化调度等情况,即切换至开环控制。
(1)
式中:U为算法输出值,即步进电机PWM脉冲频率控制量;Vmax为定日镜快速移动速度输出;f(PID)为增量式数字PID算法;Vmin为定日镜闭环跟踪速度输出;E为反馈值与目标值的偏差;Emax和Emin为偏差绝对值的两个设定阈值。
3 开环控制
开环控制依据反馈值与目标值偏差的绝对值大小分成两段进行,如式(2)所示。
(2)
当偏差E大于26 mrad时,定日镜以开环速度Vmax快速达到等待点;当偏差E小于26 mrad时,定日镜转换为开环细调,进行变速运行。此时,跟踪精度成为关键指标,采用增量式数字PID算法。
定日镜跟踪控制时,采用主从方式,以Modbus远程终端单元(remote terminal unit,RTU)通信协议实现与监控计算机的通信,通信波特率为9 600 bit/s。监控计算机每隔一定的时间向各定日镜ID发送命令。命令串中包含定日镜角度目标值。时间间隔的设置与吸热器接收靶大小、由定日镜间歇式运动导致的最大允许漂移误差以及太阳周日运动角度变化率等因素有关。本文将间隔设置为12 s。
当定日镜接收到状态查询命令时,采用应答方式将定日镜的运行状态返回至监控计算机,方便监控计算机分析和处理数据,观察跟踪效果。对于定日镜台数众多的镜场,为方便分组集中管理,可将每20台定日镜分为一组,由网络中继器连接构成子网。各子网再通过各自的网络中继器与监控计算机相连。
4 闭环控制
光电传感器主要由凸透镜、镜筒、光电池、金属外壳等部件组成[9]。
4.1 光电传感器设计
光电池布置采用四象限法则[10]。将四片性能、参数相同的光电池分别安装在镜筒底部的Ⅰ、Ⅱ、Ⅲ和Ⅳ四个象限内,如图2所示。光电池Ⅰ、Ⅱ、Ⅲ和Ⅳ由隔板隔开,分别代表东、北、西、南四个方向。
图2 光电池布置图
在光电池前放置长度可调的镜筒,并将凸透镜放置在镜筒前端。当光线平行于光轴(透镜法线方向)射入凸透镜时,合理调节镜筒的长度,使光斑均匀落在四片光电池上,则此时各光电池输出电流大小相等。当光线与光轴成φ角入射时,在四片光电池上形成的光斑必然发生偏移。光线与光轴不平行时的光斑如图3所示。光线照到的地方用阴影部分表示。此时光斑不再等面积地覆盖在四片光电池上,各光电池产生的光电流也不再相等。这时,控制器经过A/D转化模块采样经过信号放大的光电压信号[11-12],并经过比较算法,驱动方位角电机和高度角电机动作,直到Ⅰ、Ⅲ象限和Ⅱ、Ⅳ象限光电池输出的光电压相等或电压差在误差范围内,即太阳光线与透镜光轴平行,电机停止运行。Ⅰ、Ⅲ象限电压差控制方位角电机运转,Ⅱ、Ⅳ象限电压差控制高度角电机运转。
图3 光线与光轴不平行时的光斑图
镜筒的长度决定了闭环控制运行时的角度范围,即跟踪系统切入闭环控制的角度阈值。光电传感器的精度决定了闭环跟踪运行时的位置精度。因此,当闭环控制时,能够比较容易地提高跟踪系统的精确度。
本文设计的光电传感器,镜筒长200 mm,光电池直径为24 mm;凸透镜参数为厚度5 mm,直径为24 mm,焦距为800 mm。当太阳光线平行于光轴入射时,形成的光斑直径d为:
(3)

为了克服云遮工况或者早晨太阳升起以及太阳落山等工况造成的光照强度过低、闭环控制失效等情况,控制器在采样电压信号的同时,对光电流强度进行测量。当光照强度低于设定阈值,控制系统切入开环控制。
4.2 跟踪精度分析
圆形光斑移动图如图4所示[9]。当太阳光斑圆心落在光电池中心O点时,Ⅰ、Ⅲ象限面积之差为零,Ⅱ、Ⅳ象限面积之差为零,则东西方向和南北方向电压差为零。
假设光斑随着太阳光线的偏移以近似圆形移动,并且圆形光斑半径为r。当光斑移动Δx时(如图4所示),光斑落在第Ⅰ象限的面积为扇形SCOD,光斑落在第Ⅲ象限的面积为扇形SAOB。
图4 圆形光斑移动图
图4中,点A、B、C、D为光斑移动后与各象限边界的交点。设∠OAO′=θ,则根据图中对应关系,∠BCO′=∠O′BC=∠OAO′=θ。由图4可得出以下公式:
(5)
(6)
所以,扇形SCOD和SAOB的面积之差y可表示为:
(7)

(8)
则面积变化率表示为:
(9)
(10)
光电池的半径r0=12 mm。在此选择光电池的开路电压U0=650 mV,则Ⅰ、Ⅲ象限的电压差ΔU变化最大值为:
(11)

5 定日镜控制程序设计
跟踪流程如图5所示。图5中,E(k)为定日镜角度目标值和反馈值之间的偏差。控制切换条件为:当光电传感器失效、镜场优化调度时,闭环控制切换至开环控制。
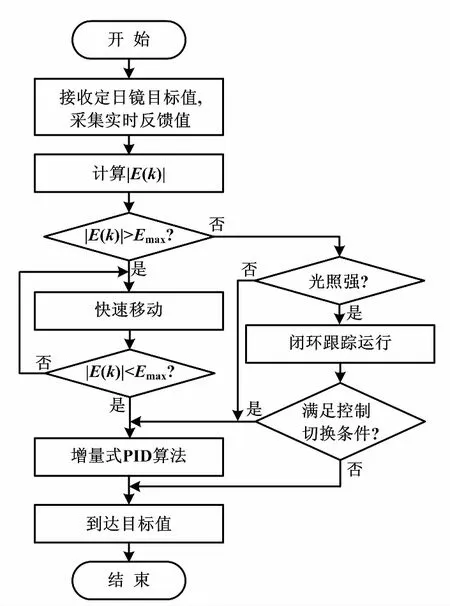
图5 跟踪流程图
6 跟踪精度测量
对所设计的定日镜跟踪系统进行了测试。首先,测量定日镜对应焦距f,选定测试时间段,绘制接收靶刻度。然后,设置定日镜为接收靶跟踪状态,每隔5 min利用光斑采集系统捕捉对应时刻的光斑图像,利用软件确定光斑中心点。光斑直径以90%能量集中范围来限定。
测试选址在南京江宁(北纬31.98°,东经118.83°),时间为2016年8月20日,当地年平均气温为15.5℃,年平均大气压为1 015.4 hPa,海拔高度为8.9 m[12]。根据上述数据,实时计算当天当地的太阳高度角和方位角。对应的开环控制和闭环控制测试的结果如表1所示。检测条件为:风速<4 m/s,f=50 m。由表1可知,本文设计的定日镜控制系统开环控制精度优于3.5 mrad,闭环跟踪精度优于1 mrad。
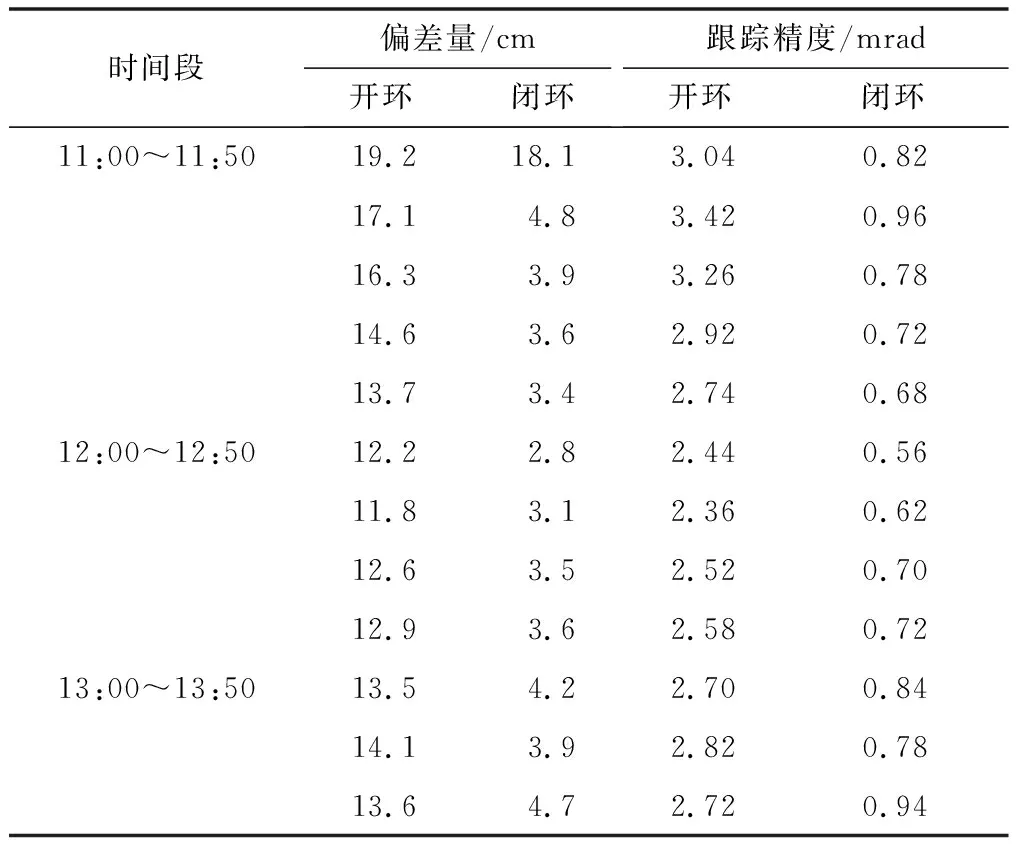
表1 控制精度测试结果
7 结束语
本文设计了基于开-闭环结合控制方式的定日镜跟踪装置,提出了复合控制策略,有效克服了开环、闭环单独控制方式的各自缺点,实现了定日镜的高效、精准、稳定跟踪。在试验测试中,该定日镜控制不仅开环精度优于3.5 mrad,闭环跟踪精度优于1 mrad,而且定日镜与监控计算机实时通信,实现了开、闭环方式的自动、无扰切换,达到了预期研究效果,具有很高的推广应用价值。
猜你喜欢
沈阳工程学院学报(自然科学版)(2020年3期)2020-08-27 10:36:40
物理实验(2019年1期)2019-02-13 10:22:22
电子测试(2018年1期)2018-04-18 11:52:24
沈阳工程学院学报(自然科学版)(2017年3期)2017-08-07 09:29:14
能源研究与信息(2016年4期)2017-03-31 04:17:45
小学阅读指南·高年级版(2016年1期)2016-09-10 07:22:44
电子制作(2016年23期)2016-05-17 03:53:41
沈阳工程学院学报(自然科学版)(2016年4期)2016-02-06 11:59:58
合成化学(2015年4期)2016-01-17 09:01:04
海军航空大学学报(2015年1期)2015-11-11 17:22:41
