Fuzzy-PID复合控制在低压铸造中的应用研究
2018-09-14 12:02孙金根霍英楠赵忠兴
电子科技 2018年9期
孙金根,霍英楠,陈 怡,赵忠兴
(沈阳理工大学 自动化与电气工程学院,辽宁 沈阳 110159)
低压铸造工艺过程的关键是控制好对液面施加的压力,根据压力控制过程的工艺特性,可将低压铸造工艺过程分为升液、充型、增压、保压、卸压和冷却6个阶段[1]。低压铸造的过程具有非线性、滞后性、时变性和不确定性等特点,为此研究智能控制系统是必要的[2]。对于液面加压控制系统的研究与应用,国内外已经取得了一些成果,如采用比例(P)负反馈的加压控制系统以及微机控制的PID加压控制系统[3-5]。
低压铸造液面压力控制系统仅采用常规的PID控制算法存在一些缺点,如压力波动大,不适合压力跟踪等;采用模糊控制能使系统具有较好的动态性能,但模糊控制很难消除系统的稳态误差。本文选用Fuzzy-PID复合控制方法,利用Matlab软件建立系统仿真模型并进行仿真实验,证明了Fuzzy-PID复合控制方法既具有PID控制无静态误差、静态稳定性好的特点,又具备模糊控制良好的动态特性以及适应能力强的优点[6],可快速准确地控制液面压力。
1 低压铸造常用控制方法
1.1 常规PID控制
PID控制器的数学表达式可以表示如下
(1)
式中,u(t)为控制器的输出;e(t)为偏差信号;Kp为比例系数;Ti为积分时间;Td为微分时间。常规PID控制算法的控制效果完全由控制参数Kp、Ti、Td决定[7]。
1.2 模糊控制
模糊控制适用于复杂系统中很难精准创建数学模型的情况,它主要依靠人们长时间在实践中获得的经验,而不必考虑被控对象内部的结构及其内部之间的联系,也就是说依据长时间在实践中总结的经验就可以达到控制目标。模糊控制系统的核心是模糊控制器,设计性能优越的模糊控制器需要对它的每个部分即模糊化接口、规则库、模糊推理以及清晰化接口分别按照实验需要进行设计,其中在实践经验中总结模糊控制器的模糊控制规则是非常重要的[8]。
模糊控制不依赖数学模型、响应快、鲁棒性好,然而受限于计算机的存储量,控制等级有限,并且控制精度较低;常规PID控制结构简单、精度高、稳定性好,但是响应时间长、工作条件改变需重新进行参数整定,研究设计复合控制器就是为了将两者的性能优点结合来。
2 Fuzzy-PID复合控制器设计
2.1 Fuzzy-PID复合控制器切换方法
复合控制器将根据不同情况选用不同的控制方法,当系统压力的绝对值大于阈值时,即在偏差较大范围内时,采用模糊控制可以加快响应速度;而在小偏差范围内转换为PID控制,消除静差,提高控制精度[9],Fuzzy-PID复合控制原理图如图1所示。
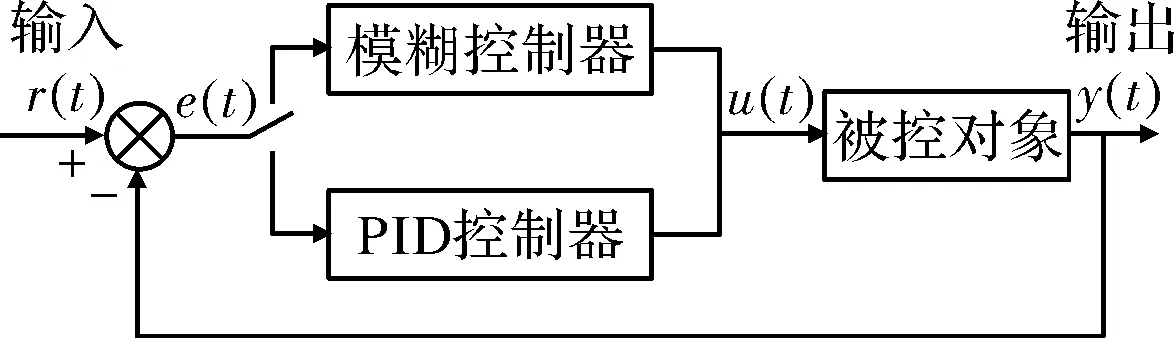
图1 Fuzzy-PID复合控制原理图
2.2 输入输出变量的论域、语言变量与隶属函数
变量的基本论域,就是变量的实际取值范围。根据系统的特性可知,输入变量e和ec的基本论域分别为[0,100],[-100,100];输出变量u为调节阀开度,没有负值,它的基本论域为[0,100]。将上述连续域的三个变量离散化,还需要利用量化因子和比例因子,量化后可得E、EC、U的模糊集论域均为{-4,-3,-2,-1,0,1,2,3,4},转变过程中采用的量化因子ke=0.08,kec=0.04,比例因子ku=12.5[10]。
语言变量的档级过多会导致模糊规则过多,造成编程困难,档级太少又达不到控制目标,根据实际需要将语言变量划分为7个档级{NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大)}。
根据建立隶属函数应遵循的原则,确定函数的左边界采用Z形隶属函数(右边变化缓慢),右边界采用S状隶属函数(左边变化缓慢),中间部分采用三角形隶属函数,利用Matlab中的模糊逻辑工具箱来建立这些隶属度函数[11]。
2.3 建立模糊控制规则
依据实践中获得的操作经验,总结出具体的模糊控制规则为:(1)压力差为负大,控制量取为负大以快速消除已有的负大压力并且阻止压力继续变大,但如果压力的变化为正,则要减小控制量;(2)压力差是负中,同样是要消除已有压力,取值同规则(1);(3)压力差是负小,表明系统将要稳定,当压力为负变化时,控制量取负中;当压力正变化时,控制量可取零或正小[12]。
根据在实践中获得的操作经验规则,并依据7个档级的语言子集将模糊控制规则整理为如表1所示的模糊控制规则表。
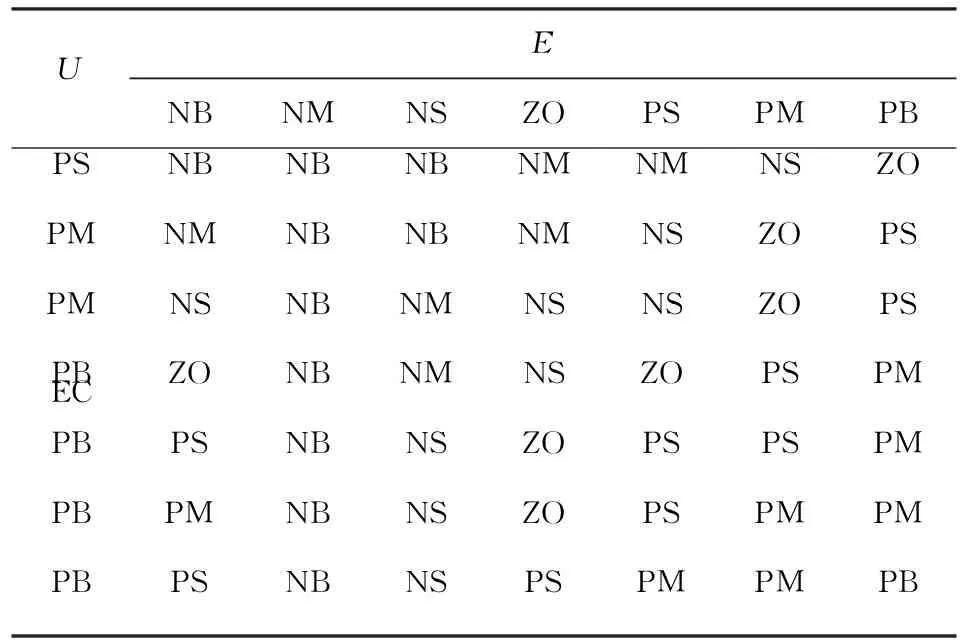
表1 模糊控制规则表
2.4 模糊推理方法及反模糊化方法
在模糊推理环节采用并行法,能够更加清楚地表现出每条规则所起的作用,而且并行法在增加、减少和修改控制规则时更加方便灵活。将输出论域上的模糊子集即模糊推理得到的输出值转化为执行机构可识别的精确控制量u的方法叫做反模糊化。本文反模糊化方法采用式(2)所示的加权平均法[13]。
(2)
式中,V0为反模糊化输出值;Vi为最大隶属度输出值;系数Ki根据实际情况而定。
2.5 PID控制器参数整定方法
设计PID控制器,最重要的就是对参数进行整定,根据控制过程以及被控对象的特点来确定参数Kp、Ti和Td的值。在实验过程中整定3个参数的方法基本上可以概括为两种,一种需要依据数学模型进行理论计算的方法即理论计算整定法,本文针对低压铸造控制过程中的特性,采用另一种方法即工程整定方法[14]。
3 仿真分析
Fuzzy-PID复合控制方法简述如下,控制过程刚开始时e和ec都比较大,为了系统能够获得较好的动态特性,首先将控制方法设置为Fuzzy控制。但有时e和ec都很小,响应曲线不能确定是否已经达到了比较稳定的阶段,此时应该考虑调节阀开度的变化率,如果此时有较大的调节阀开度变化率,控制方法切换为PID控制会使控制品质变差。所以当系统响应趋于平稳,偏差e、偏差的变化率ec和输出变量u都达到预先设定的条件时,切换为PID控制方法,能够使系统得到较好的静态特性。由上述分析可知复合控制的切换方法应根据3个信息:e、ec、u。在控制过程中,复合控制器会根据预先设定的条件在不同情况下采用恰当的控制方法,使控制过程更加快速稳定。
通过低压铸造测量实验,辨识被控对象液面加压控制系统的压力数学模型,不考虑系统的滞后特性,数学模型可由二阶惯性环节近似表示,可设系统传递函数为
(3)
确定了系统的数学模型后,接下来创建系统仿真模型。首先进入Matlab软件中的Simulink工具箱,在模块库中选取所需要的各基本模块来创建控制系统仿真模型,然后再加入压力跟踪信号,如图2所示为Fuzzy-PID复合控制的系统仿真模型。实验还需分别建立PID控制和模糊控制的系统仿真模型,并通过Mux模块将3个控制系统的输出信号集成在一起并显示在一个示波器上,便于将仿真结果进行比较。最后编辑模糊推理系统(FIS),并将编辑好的FIS导入工作空间,与仿真系统的模糊逻辑控制器建立连接,点击运行按钮开始系统仿真[15],仿真完成后双击示波器,得到如图3所示的仿真曲线对比图。
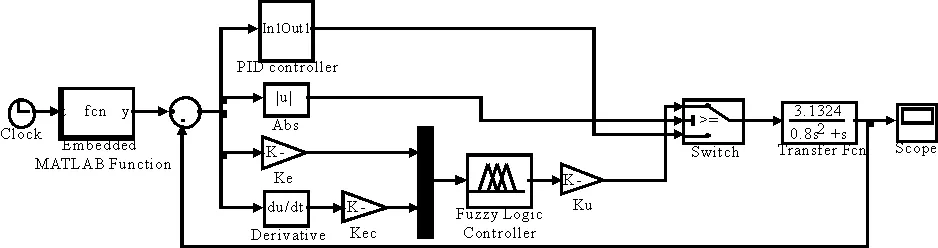
图2 Fuzzy-PID复合控制系统仿真模型
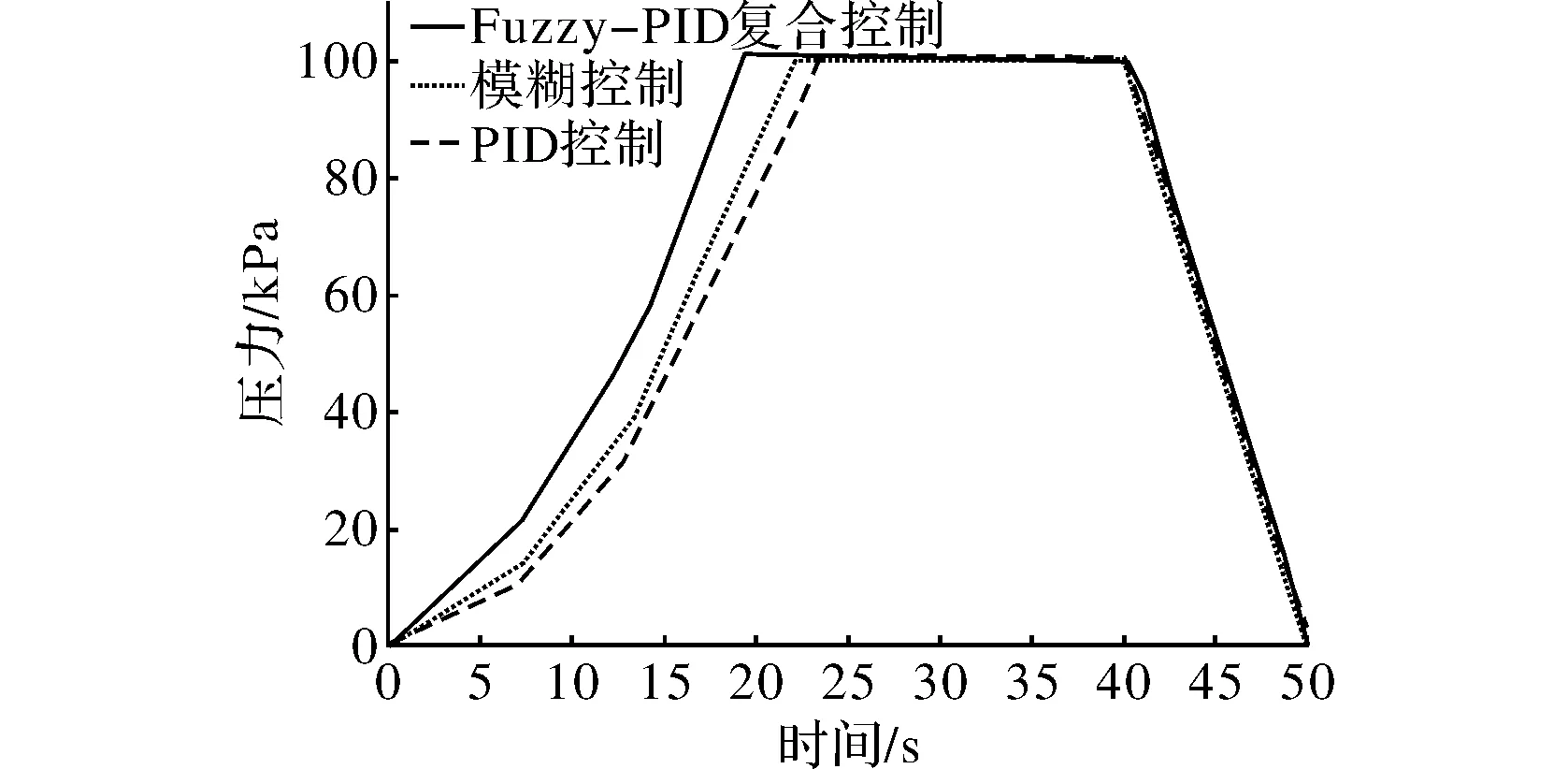
图3 仿真曲线对比图
如图3所示,用3种线型分别描绘出采用Fuzzy-PID复合控制、模糊控制和PID控制3种控制方法的系统仿真曲线。将3条曲线进行比较可以看出,在升液、充型、增压3个阶段PID控制与模糊控制的仿真曲线均有明显滞后,压力响应速度较慢,并且在保压阶段PID控制与模糊控制的仿真曲线均有小幅度的震荡,系统不稳定,控制效果不好;采用Fuzzy-PID复合控制方法的系统仿真曲线压力跟踪效果好,压力响应速度快,无明显滞后,而且控制过程更加平稳,超调量小,保压阶段无明显震荡,降压阶段曲线比较平稳,控制效果较好。
4 结束语
本文设计了结合PID控制方法和模糊控制方法的Fuzzy-PID复合控制方法。介绍了Fuzzy-PID复合控制器的设计思路和方法,利用Matlab软件建立控制系统仿真模型,进行系统仿真并分析比较仿真曲线。仿真实验结果证明了Fuzzy-PID复合控制方法动态响应快、适应能力强,实时控制更加精确,应用于低压铸造液面压力控制系统可以取得较好的控制效果。
猜你喜欢
遥测遥控(2022年1期)2022-02-11
成都信息工程大学学报(2021年6期)2021-02-12
测控技术(2018年10期)2018-11-25
西南交通大学学报(2016年3期)2016-06-15
广东石油化工学院学报(2016年3期)2016-05-17
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
电测与仪表(2015年21期)2015-04-09
体育科学研究(2015年5期)2015-02-28