
桁架式桩腿自升自航式服务平台开发设计
2018-09-11 03:02:12姚俊卿
中国海洋平台 2018年4期
姚俊卿, 方 舟
(1. 天海融合防务装备技术股份有限公司, 上海 201612;2. 嘉兴南洋职业技术学院, 浙江 嘉兴314031)
0 引 言
自升式服务平台作为离岸工程的重要辅助装备,起源于墨西哥湾水域,主要为海上油田提供设备维护及人员住宿等支持服务。其在外形上具备常规船舶的特点,通过装备的升降装置和桩腿将船体抬离水面,工作时不受海水运动的影响,保证了海上作业的稳定性和安全性,可在相对恶劣的海况下持续作业,扩大作业窗口期,有效提升作业效率。近年来,越来越多的船舶所有人认识到该型海工装备的优越性,使其在国际上更多的水域得以利用,由此也对该型装备提出了更多的功能需求并推动了自升式服务平台技术的不断发展。目前自升式服务平台已广泛应用于海上油田生产以及海上风电施工等各种水上工程中。
自升式平台受其作业形式的限制,作业水深能力是其最重要的指标之一。随着各种离岸工程和海洋资源的开发不断向深海推进,市场对自升式服务平台的作业水深提出了更高的要求。随着作业水深的增加,传统自升式服务平台使用的壳体式桩腿截面增大,所受波浪力大幅增加,桩腿重量增加明显,经济性急剧下降。桁架式桩腿自升式服务平台的设计初衷来源于自升式钻井平台,随着作业水深的增加,钻井平台的桩腿均采用桁架式结构。当作业水深超过60 m时,桁架式桩腿重量轻,受环境载荷小的优点愈发突出。随着大型化自升式风电安装平台的出现,桁架式桩腿承受载荷大的优点也使其具备更好的经济性。
自升式服务平台起源于美国,近年来得益于欧洲对自升式服务平台的大力发展,功能逐渐多样化,随着升降系统技术的成熟,自升式服务平台也具备了向大型化发展的条件,国际上已经出现采用桁架式桩腿的大型自升式风电安装平台,国内也在探寻该方向的发展需求。
早期的自升式服务平台由自升式钻井平台简化而来,一般设置3条桩腿,尺度较小,并配备辅助推进装置。后经欧洲市场大力推广,逐步演变为4条桩腿形式,带有推进装置并具有动力定位能力。国外已有取得船级社自航符号的自升式服务平台,并逐渐成为新造自升式服务平台的主流配置。国内已具备设计平台推进装置进行辅助推进的成功经验,近年来受国际潮流影响,也陆续开始从事自升自航式服务平台的基本开发设计。桁架式桩腿在该型平台上的成功应用可使该型平台应用到更深的水域,获得更大的市场空间。
1 桁架式桩腿自升自航式服务平台概况
本文研究的平台入级美国船级社,挂巴拿马旗。平台主体为船型外观,由于是自航式平台,有严格的航速指标,因此平台尾部设置3台全回转推进器,首部设置3台管隧式侧向推进器。平台有4条桁架式桩腿,采用电动齿轮齿条升降方式,桩腿底部设有桩靴,可适用于多种土层升降作业,最大作业水深80 m。
平台主要作业形式是航行至预定区域并定位,利用升降装置及桩腿将平台主体抬离水面,获得稳定的作业平台,为各种离岸工程提供支持服务。因此,该平台设置了2台绕桩式起重机,单台最大起重能力为300 t。绕桩式起重机不占用甲板面积,并最大限度地减小起吊作业盲区对舷内和舷外的影响,增大起重机有效吊距对甲板的覆盖范围。
作为海上服务平台,居住能力是重要考核指标。平台首部设有可居住250人的生活区,生活区主要位于主甲板以上,共4层,驾驶和控制中心位于上建最顶部的第5层。平台上建前部设有直升机平台,在平台站立状态下可供直升机起降,适停机型为S92A/S61N。
1.1 主要尺度及参数
平台主尺度见表1。该平台按照美国船级社和巴拿马当局的有关规范、规则要求进行设计,取得美国船级社[1]如下船级符号:ABS,*A1,Self Elevating Unit,*AMS,*DPS-2,CRC,HELIDK(SRF),ENVIRO-OS,CPS,MLC-ACCOM。平台总布置如图1所示。

表1 主尺度 m

图1 平台总布置
1.2 主要功能
结合船级符号归纳该平台的主要功能如下:(1)该平台以国际海事组织发布的《2009年海上移动式钻井平台构造和设备规则》为基础法规,按照美国船级社相关规定进行设计,属于自升式平台。(2)该平台为自航式平台,推进器并非仅作辅助推进,还使得该平台在目标水域作业时不需要配备拖船守护,设计航速为6 kn。(3)该平台具有DP 2动力定位能力,机械配置上须根据规范要求考虑冗余。(4)该平台配置直升机平台,并具有直升机加油装置,设计中需注意加油装置的布置及危险区域的影响。(5)该平台具有MLC-ACCOM符号,意味着该平台的船舶舒适度具有较高水平,满足国际劳工大会发布并已生效的《2006年海事劳工公约》。(6)该平台具有环保船级符号,同时在设计中根据船舶所有人提供的设计输入要求,须满足UK HSE[1]的相关要求,并满足北海作业要求。(7)该平台额定乘员为250人,除生活区配置满足乘员要求外,平台救生设备根据船舶所有人要求按照300人进行配备,主要是考虑到平台作业过程中临时人员的救生需求。(8)该平台配备2台绕桩式起重机,单台最大起重量为300 t,具有各种近岸工程施工和海上油田维护等能力。(9)该平台甲板面积达1 500 m2,设计最大可变载荷为2 000 t。
2 关键技术要点
2.1 船型选取及主尺度优化
根据设计输入要求的甲板面积以及生活区容量,初步确定平台型宽和型长,并结合功能需求进行初步的总体布置。对于平台的型深,初步方案阶段根据机械设备的布置需求以及电缆和通风管系的布置等进行确定,同时应结合自持力要求确定各类液舱的舱容和位置。型深的确定还须满足浮态时干舷的要求以及为平台拔桩提供足够的储备浮力。
平台总体布置初步完成后,将经过初步估算的桩腿布置到平台上,并对平台的重量和重心进行初步的统计估算。根据平台重量和可变载荷指标,确定平台的设计吃水,根据平台的整体重心,调整桩腿的位置,使得4条桩腿形成的几何中心位置尽量与平台的重心接近。而且平台船体的浮心位置也应尽量与平台重心接近,这样可使平台进行升降操作前的调载准备工作大幅减少,提高作业效率。另外,为了最大程度地发挥升降装置的能力,应考虑使平台不计桩腿、桩靴的船体部分重心位置尽量保持在4条桩腿的几何中心附近,从而保证进行升降作业时每条桩腿及升降装置的受力基本一致。
初步方案确定后,进行桩腿强度校核和性能校核,根据校核结果进一步调整主尺度并优化分舱布置,不断接近最优主尺度。总体方案确定流程如图2所示。由于该平台为自航平台,航速有严格的考核要求,在船型确定前,须进行船体模型的水池拖曳试验。试验对桩靴外置于船体和收进船体内2种情况进行了比较,结果表明:桩靴如果外置,船体所受阻力将较收进船体时增加50%。由此确定了将桩靴收进船体内的方案。

图2 总体方案确定步骤
2.2 桩腿选型
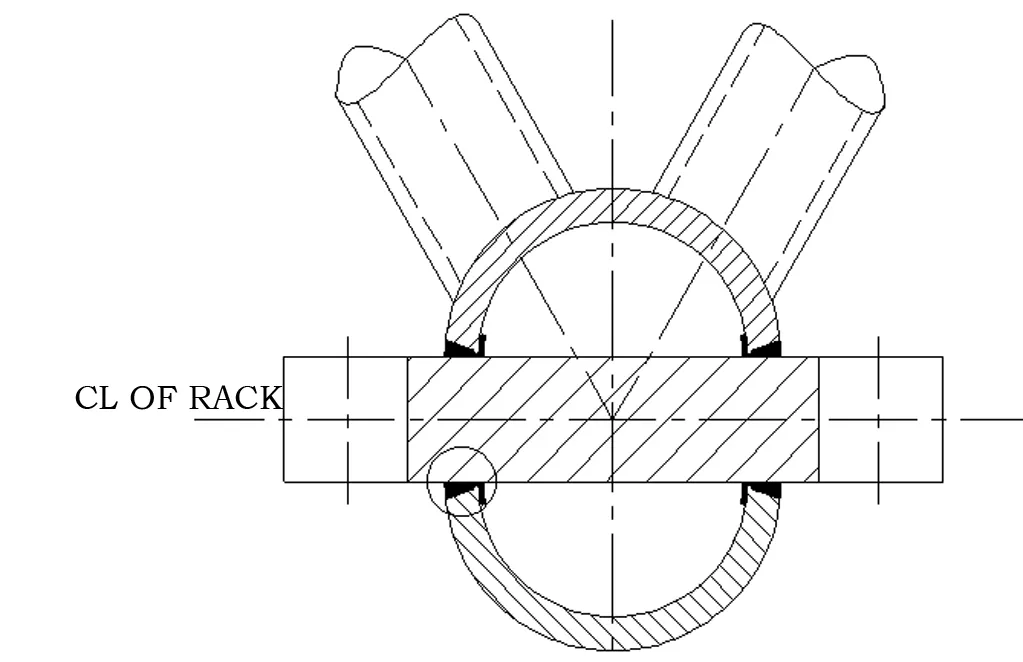
图3 桩腿主弦杆
桩腿的参数是影响平台主尺度的最主要因素之一。该平台的作业水深超过以往任何同类型平台,经过计算论证可知:壳体式桩腿已不适用。研究表明:当作业水深超过60 m时,壳体式桩腿的经济性急剧下降。因此,该平台桩腿选择桁架式。
在自升式钻井平台上普遍采用三角桁架式桩腿,即使用3根主弦杆与若干水平及斜撑杆焊接而成。主弦杆由2个半圆形管和中间的齿条板构成,如图3所示。根据斜撑杆的分布形式又分为K型、X型等结构形式。该平台较多采用K型三角桁架式桩腿进行优化计算,对桩腿强度在所有可能出现的工况(自存、作业、预压载)下进行分析,确定桩腿的尺度。
自升自航式服务平台与自升式钻井平台的作业形式存在差异,其浮态航行或拖航工况占生命周期的较大部分,受海洋风、浪、流等因素影响显著。在外载荷作用下,平台产生摇荡运动,在桩腿上产生较大的惯性载荷,会对桩腿强度产生较大影响[2]。因此,对于桩腿的强度考核需特别注意拖航时的极限工况。
2.3 升降装置选型
对于三角桁架式桩腿,普遍采用每一主弦杆两侧对置升降齿轮的布置方式,该方式使桩腿单根主弦杆的受力均衡。确定了升降装置的布置方式后,根据平台除桩腿、桩靴之外的重量及重心位置,输入满足设计需求的可变载荷,确定升降装置所需的总举升力,进而确定齿轮的数目。
升降装置的选型还必须考虑齿轮的支持力是否满足各工况的要求。自升式服务平台单次服务周期相对较短,且移动比较频繁,如使用自升式钻井平台上配置的锁紧系统,操作非常不便。该平台升降到位后,利用升降装置的支持力锁紧桩腿,作业时所有自身和外部载荷最终均由升降齿轮承担,此时考核的是升降装置的支持力。支持力的选定取决于极限工况,自升式平台的极限工况通常为风暴自存工况,但是对于自升式服务平台而言,不必如自升式钻井平台那样在最大设计水深情况下抵御100 kn风速的风暴,而是可以选择风暴来临前迁移到水深较浅的水域进行升桩避风,从而降低升降系统成本。因此,该平台的极限工况还需选择其他工况计算比较后才能确定,例如最大作业水深下70 kn风速待命不撤离工况,以及起重机作业工况等。升降齿轮的支持力对成本影响较大,应根据使用需求权衡确定。
在确定齿轮总的举升力时,应充分考虑升降系统的效率以及桩腿与齿轮及船体之间的摩擦等因素,避免出现举升力不够的情况。而且自升式服务平台升降作业频率大,升降装置的疲劳寿命是选型时关注的重要指标。
2.4 总体强度
自升式平台除对漂浮状态时的船体强度进行评估外,还需对站立状态各工况下船体总体强度进行分析和校核,站立状态考核工况可归纳为风暴自存、作业和预压载3种。自升式平台在站立状态时主要承受自重、环境载荷及海床通过桩腿传递的支撑载荷,对于自升式平台的自重,在站立状态总体强度分析时须选择甲板可变载荷最大时的满载状态,且甲板可变载荷应布置在使结构物总体强度最大的位置[3]。该平台为控制成本,在进行风暴自存状态考核时,采取降低可变载荷的方式,这在实际作业时也是切实可行的。该平台还需对起重机起吊作业工况进行校核,考虑自重负荷时应区分起重负荷是否划归到总的载荷中。该平台预压载采取对角桩腿同时预压的方式,选取所有工况中最大的桩腿支反力为目标载荷,对总体强度进行校核和分析。
2.5 拖航稳性
平台拖航状态分为远洋拖航和油田拖航2种[4]。自升式平台拖航时桩腿升起,由于桩腿的重心较高导致平台整体重心显著升高,且所受风倾力矩较大,对拖航造成非常不利的影响。该平台的稳性衡准除基于IMO MODU CODE[5]、ABS规范[6]外,还需遵循UK HSE[1]的相关要求。
该平台的完整稳性分析,对于远洋拖航采取强风暴工况考核,最小风速取51.5 m/s(100 kn),而对于油田拖航,最小风速取36 m/s(70 kn)。由于桩腿完全收回时平台重心较高,计算发现远洋拖航不能满足稳性衡准要求,如进一步增加平台主尺度,会影响平台的经济性。考虑到自升式钻井平台有将桩腿下放一定高度后进行远洋拖航的先例,该平台经核算,确定进行远洋拖航时将桩腿下放20 m以满足完整稳性衡准要求。
破损稳性衡准要求平台在破损工况下具有足够的储备稳性,使其承受来自任何方向的25.8 m/s(50 kn)风速所产生的风压侧倾力矩。结合完整稳性和破损稳性校核结果,确定平台的极限许用重心高度,该结果应作为安全限制条件记录于平台的操作手册中。
拖航稳性受风载荷的影响较大,桁架式桩腿风载荷一般采用简化模型进行计算分析,研究表明:将整个桁架式桩腿截面等效为正三角形或圆形,计算得到的桁架桩腿风载荷比较接近实际情况[7]。该平台桩腿风载荷采取将整个桩腿等效为圆柱形的方法进行计算。
2.6 动力配置
该平台船体经过模型拖曳试验,确定了船体总阻力。平台航行时除水流阻力,还受风阻力的影响,为确保航速指标,应综合考虑平台船体的水流阻力以及平台所受的风阻力,从而确定平台所需的推进总功率。在推进器的数量上,如使用2台尾部推进器,则单台功率较大,设备外形需要船体具有较大型深才可布置,且不利于动力定位冗余的要求,缺乏经济性,因此该平台采用3台尾部推进器。由于该平台型宽较大,推进器之间间隔距离较远,相互之间不会影响。尾部推进器采用电动变频全回转技术,属于当前主流配置。根据动力定位分析确定首部推进器总功率,并采用3台管隧式侧向推进器,首部推进器数量和尾部推进器数量保持一致,有利于动力系统网络的设计。
经电力负荷分析,确定该平台所需最大功率工况为动力定位下放桩腿状态,根据需要的总功率进行主发电机选型。经过对各种工况进行电力负荷分析,确定发电机组的单台功率和发电机组数量,在选型过程中应重点关注平台最常用工况下发电机组的经济性,另外该平台有动力定位冗余要求,发电机组选型时必须考虑相应机组失效后亦可满足动力定位的相关要求。
2.7 锚泊定位分析
该平台应船舶所有人要求,配置了4点锚泊定位系统,作为平台辅助定位手段。针对锚泊定位工况使用三维势流挠射/辐射的源汇分布法和悬链线法进行耐波性运动响应分析和锚泊分析的水动力计算。这些方法目前已经广泛应用于海洋工程的水动力计算分析中。根据设计输入环境条件,考虑平台最大作业水深80 m时使用锚泊定位并进行下桩操作。除考虑浪、流作用力外,由于桩腿下放,还需特别考虑桩腿及桩靴所受到的浪、流载荷的作用。该平台不取得船级社锚泊定位入级符号,因此锚泊定位能力仅需根据船舶所有人提供的目标水域水文资料计算确定。该平台为自航式平台,根据美国船级社的要求需配备临时锚泊设备,该平台使用4点锚泊定位系统中的首部左舷1套锚泊定位系统兼作临时锚泊设备以达到规范的要求。
2.8 生活区布置
海上居住支持作为该平台的主要功能之一,对生活区的舒适度要求较高。生活区的功能分区应清晰:主甲板及主甲板以下区域环境相对较差,一般为公共服务处所;上建第二层向上等属于住宿环境较好的区间,人员住宿房间均布置于此;视线范围最佳的顶层为驾驶和控制中心。
平台定员较多,生活区面积大,在布置上应满足使用方便的要求,以安全性为根本,逃生线路清晰明了并满足规范要求。该平台需要取得船级社MLC-ACCOM符号,由于该平台的挂旗国巴拿马的法规未要求自升式平台舱室设备按照《2006年海事劳工公约》设计,经与船舶所有人沟通,在满足船级社要求的前提下,仅将持有相关证书的18名船员的舱室设备按该公约要求进行设计。
2.9 噪声振动控制
该平台取得ABS船级社MLC-ACCOM符号,ABS相关规范[8]对噪声振动指标有严格的要求。为控制噪声和振动,应从布置上将噪声和振动源尽量远离生活区。该平台的主要噪声及振动源为尾部推进器、机舱和首部侧向推进器。生活区位于平台的首部,机舱和尾部推进器均位于平台的尾部,对生活区基本无噪声和振动方面的影响。首部侧向推进器工作时产生的噪声及振动对生活区的影响较明显,设计阶段应做好充分的降噪措施,一般可使用常规隔音材料,如阻尼材料进行隔音降噪等。
噪声标准对于舱室围壁的隔音指数有明确要求,设计阶段应注意围壁形式和材料的选取须满足船级社的相关要求并取得相应证书。对于房间噪声的控制,比较容易忽略的还有空调及通风系统产生的噪声,此外还要注意房间出风口布风器等的选型。
2.10 直升机平台相关设施
本自升式服务平台设有直升机加油设施,布置上应满足障碍区域的相关要求,还应注意加油设施的危险区域划分,避免在危险区域范围内布置电气设备。划分危险区域时应注意除油罐和分配器的布置,直升机平台漏油收集柜也属于危险区域。
由于本服务平台属于自航平台,而直升机平台一般位于上建的前部,直升机平台及其相关设施的布置应注意不能影响平台的驾驶视线,同时还须考虑雷达的扫描范围,避免直升机平台在雷达扫描范围内形成盲点。
3 结 语
本文响应了自升自航式服务平台向深水推广的市场需求,阐述了一款桁架式桩腿自升自航式服务平台总体开发设计过程,并对其中的关键问题进行了总结。自升自航式服务平台使用桁架式桩腿有利于该型装备应用于更广泛的水域,推动了该型装备向大型化发展,促进其应用于海上风电安装等更多领域。相较常规自升式服务平台,自升自航式服务平台的设计难点主要在于桩腿的尺度优化选型,可提升该型装备的经济性。
猜你喜欢
海洋石油(2021年3期)2021-11-05 07:42:54
舰船科学技术(2021年12期)2021-03-29 01:28:38
四川冶金(2019年4期)2019-11-18 09:30:52
当代陕西(2018年12期)2018-08-04 05:49:08
中国船检(2017年3期)2017-05-18 11:33:18
现代工业经济和信息化(2016年19期)2016-05-17 05:38:10
船海工程(2015年4期)2016-01-05 15:53:48
学习月刊(2015年10期)2015-07-09 03:35:12
自动化博览(2014年9期)2014-02-28 22:33:33
中国船检(2013年10期)2013-08-15 00:42:40
