抓斗式挖泥船专利技术分析
2018-09-10 20:08:22张化难齐隽楠
河南科技 2018年15期
张化难 齐隽楠

摘要:抓斗式挖泥船属于机械式挖泥船,其不同的抓斗结构形式可适用于不同的土质。本文通过对抓斗式挖泥船申请量发展趋势、专利申请全球分布、重点申请人特点进行研究,为我国相关产业发展提供参考。
关键词:挖泥船;抓斗式;专利;申请量;申请人
中图分类号:U674.31 文献标识码:A 文章编号:1003-5168(2018)15-0049-04
Patent Technology Analysis of Grab Dredger
ZHANG Huanan QI Junnan
(Paten Examination Cooperation Center of the Patent Office, SIPO, Henan, Zhengzhou Henan 450018)
Abstract: The grappler is a mechanical dredger, and the different grab structure can be applied to different soils. Through the analysis of trend in patent application amount development, patent application global data and specialty of main applicants, this paper provides reference for the development of related industry in our country.
Key words: dredger;grapple;patent;amount of application;applicant
随着国内经济、环境保护、水利建设、水上运输的发展,对航道和港口有了更高的要求,对挖泥船的需求也越来越大,国内外对挖泥船的配套设备也提出了更高的质量和技术要求,同时也推动了国内外挖泥疏浚领域对挖泥船和疏浚设备的研究及专利申请[1-2]。
本文以数据库CNABS、VEN中截止到2017年5月10日公开的专利数据为基础,通过IPC分类号和关键词联合检索,统计了抓斗式挖泥船全球以及国内年代分布发展状况,研究主要申请人及其特点,为我国抓斗式挖泥船的研发提供参考性建议。
1 专利申请量趋势分析
1.1 全球申请量趋势分析
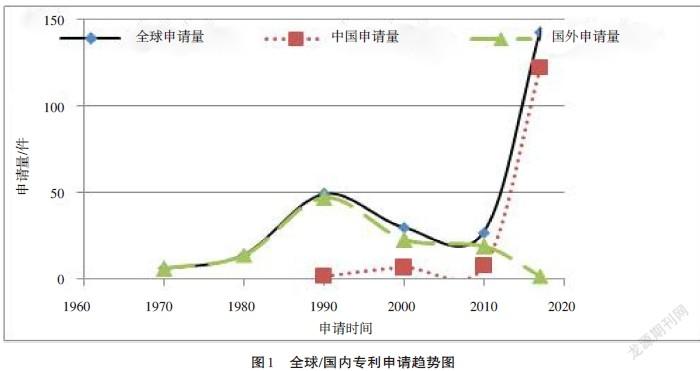
图1中菱形点曲线表示全球抓斗式挖泥船申请量随年代变化的分布曲线。從中可以看出,抓斗式挖泥船专利申请开始于1970年,总体上,1980年之前发展平缓,1980—1990年发展逐渐升温,1990—2000年发展有回落趋势,2000—2010年处于平稳发展时期,2010年后专利申请量激增。抓斗式挖泥船前期发展缓慢的主要原因在于,在1980年之前世界经济发展还较为平缓,大型疏浚机械的发展较为滞后,对航道疏浚的迫切程度较弱,各大工程机械企业的关注点主要集中在大型挖掘机液压系统、动力传动等方面的研发;1980年之后,随着各国经济的不断发展及各国航道之间经济往来的增多,航道疏浚也逐渐提上日程,并刺激各大工程机械企业将研发重点投放在抓斗式挖泥船,抓斗式挖泥船的专利申请量也逐渐上升;2008年之前世界基础设施建设处于一个平缓期,对铲斗结构功能的要求也趋于平缓;2008年之后世界经济陷入困境,多国通过大量的基础设施建设刺激经济发展,工程机械在此期间得到迅速发展,对抓斗式挖泥船的要求也进一步提高,专利申请量开始呈激增状态发展。
1.2 国内申请量趋势分析
图1中方形点曲线表示中国抓斗式挖泥船专利申请量随年代变化的分布曲线。从方形点曲线可以看出,中国铲斗卸载装置专利申请开始于1990年,在1990年之前,中国经济发展较为缓慢,在大型工程机械方面的研究较为滞后,在1978年提出改革开放后,中国经济开始复苏,沿海城市率先发展,对航道疏浚的需求也逐步提上日程,对挖泥船的研发也逐渐进入工程师的视野;1990—2010年,中国对抓斗式挖泥船的研究及发展较为缓慢;2010年之后申请量呈爆发式发展。中国铲斗卸载装置申请量前期发展缓慢的主要原因在于很长一段时间内国内企业对知识产权的关注度还不够高、当时国内基础设施建设对航道疏浚的需求也不足。2010年之后随着基础设施建设迅猛地推进,对航道疏浚的要求及抓斗式挖泥船的精准度也相继提高,同时中国开始大力鼓励发明创造并制定了相关激励政策,各企业高校对专利的重视程度空前提高,因此,抓斗式挖泥船的申请量呈爆发式增长。
1.3 国内、全球对比分析
从图1中国内外申请量年代分布曲线可以看出,国内起步晚于国外,国内发展与全球发展趋势基本吻合,国外的发展对国内发展起到促进作用,2010年后,国内相关专利的申请量为全球相关专利申请量的增长做出了巨大的贡献。
2 专利申请分布概况
2.1 专利申请全球分布
由图2可以看出,中国、日本是抓斗式挖泥船申请量大国,其中,我国相关专利申请量几乎占据全球总申请量的一半,说明我国在航道疏浚方面进行了更为深入的研究和开发,并且对专利的重视度可见一斑;而其余相关申请量在全球范围内的分布较为分散,且在德国、美国、加拿大、英国等传统工业发达国家也均有涉及,这是由于美国、德国、加拿大、英国等国家的水域覆盖面积较大、航道网络复杂,且其对水利疏浚具有一定的要求。
2.2 国内重点申请人分析
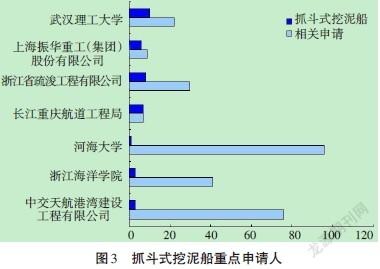
由图3可知,国内重点申请人主要集中在沿海城市,且主要集中在航道疏浚公司和高校,个人申请较少,这是由抓斗式挖泥船的机械特性所决定的。
3 技术发展脉络
通过阅读专利申请文件,选取具有代表性,对抓斗式挖泥船的改进产生重要影响的专利申请文件进行梳理,将抓斗式挖泥船的技术发展脉络概括为传统抓斗式挖泥船—蚌壳式液压抓斗—容积可变的颚式抓斗—自定位抓斗挖泥船—自动稳零抓斗式挖泥船—智能式抓斗挖泥船。
3.1 传统抓斗式挖泥船
专利GB743811 A公开了一种抓斗式挖泥船(参见图4),其采用滑轮组、滑轨、绞车及起重机臂配合控制抓斗的升降,实现挖泥、疏浚。
3.2 蚌壳式液压抓斗
专利CN201148631 Y公开了一种水下疏浚用蚌壳式液压抓斗(参见图5),包括斗体和液压缸,斗体重容比为1~2,切削角为10°~12°。该水下疏浚用蚌壳式液压抓斗,斗体线型和重容比合理,具有较高的充斗系数,配合液压抓斗本身优点,能大大提高挖掘效率,可以节约制造成本和减轻整体重量,有利于节约动力设备的功率,更适用于挖掘淤泥、软黏土、一般黏土、松散沙质土及粒径较小的碎石、卵石。
3.3 容积可变的颚式抓斗
专利CN102644305 A公开了一种开斗面积和容积可变的多瓣式抓斗(参见图6),包括抓斗基座和若干颚板,若干颚板分别与抓斗基座铰接,用于通过颚板之间的开合实现抓取动作。所述抓斗基座包括上、下布置的抓斗上基座和抓斗下基座,所述颚板包括相互铰接的上颚板和下颚板,所述下颚板中部沿颚板外侧向上设有延伸段;所述上颚板的上端与抓斗下基座铰接,所述延伸段通过辅助杆与抓斗上基座铰接。与现有技术相比,本发明的开斗面积能够可控调节,抓斗容积可自调节,实现了对各种不规则物料的更好抓取。
3.4 自定位抓斗挖泥船
专利JPS51112092 A公开了一种自动抓斗式挖泥船,如图7所示,其采用可逆电机、位置检测器、信号发生器、数据处理器、钢缆、滑轮对抓斗的升降进行控制。
专利JP2001090101 A公开了一种河床用抓斗式挖泥船,如图8所示,其包括測角仪、GPS天线、送波器、受波器,其根据测角仪的输出角度控制抓斗的位置,以精确控制河床的清理位置。
3.5 自动稳零抓斗式挖泥船
专利CN85102187 A公开了一种抓斗自动稳零装置,适用于以叶片可调式液力变矩器为动力转换装置的挖泥船抓斗挖泥吊机、钻井下钻吊机和起重机等起吊设备。其特点是由零转速检测器、转向鉴别器、下降突加信号发生器、数字积分器和操作手柄开关所组成。采用电子线路自动控制方式,通过单手柄操作,对以叶片可调式液力变矩器为动力转换装置的抓斗挖泥吊机双闭环调速系统进行控制,实现当手柄置“中央零区”时,不必使用机械刹车就能使抓斗(空斗或满斗)在空中自动停住。
3.6 智能式抓斗挖泥船
专利CN106546211 A公开了一种抓斗挖泥船抓斗姿态测量系统,其包括GPS、罗经、船舶吃水传感器、吊臂倾角传感器、抓斗机旋转角度传感器、抓斗下放深度传感器和抓斗开口度传感器通过数据接口连接计算机,GPS、罗经和抓斗机旋转角度传感器用于测量抓斗平面定位,船舶吃水传感器、吊臂倾角传感器、抓斗下放深度传感器、抓斗开口度传感器用于测量抓斗深度、抓斗开口度。本发明具有监测抓斗姿态准确,姿态信息实时显示,监测结果直观化等优点,还可以通过对抓斗姿态数据的处理、计算,实现不同抓斗工作模式下的自动控制,从而实现精准疏浚和高效疏浚。
4 结语
在相关政策以及经济快速发展的带动下,近年来,国内外挖泥船发展十分迅速,各企业进行积极研究,促使挖泥船朝向大型化、多功能化、高智能化方向发展。为提升抓斗式挖泥船的可操作性,在抓斗式挖泥船中引入节能装置,同时为解决疏浚作业的不可见性,在抓斗式挖泥船中应用计算机技术及仪器仪表技术,从而将抓斗姿态实时信息、监测结果及作业过程实时反映在显示装置上,实现不同抓斗作业模式下的自动控制,从而实现精准、高效疏浚。
参考文献:
[1] 钱卫星.挖泥船的分类及其发展趋势[J].江苏船舶,2008(6): 8-9.
[2] 张闯.抓斗式挖泥船在海域清淤工程中的实际应用[J].福建建材,2016(6):97-99.
猜你喜欢
粮食与饲料工业(2022年2期)2022-04-27 02:08:52
留学(2019年12期)2019-07-29 07:04:12
领导决策信息(2018年9期)2018-05-24 06:34:42
中国知识产权(2017年10期)2017-10-31 11:37:12
工业设计(2016年7期)2016-05-04 04:02:05
设备管理与维修(2016年5期)2016-03-16 02:20:48
化学分析计量(2016年4期)2016-03-14 03:49:49
化学分析计量(2016年1期)2016-03-14 00:35:19
船海工程(2015年4期)2016-01-05 15:53:50
现代企业(2015年4期)2015-02-28 18:48:28