
基于RBF神经网络的微机械陀螺仪温度控制系统
2018-09-10 07:22于会于海峰李凯于海涛
河北工业科技 2018年5期
于会 于海峰 李凯 于海涛

摘 要:为了避免微机械陀螺仪受温度影响产生较大波动,设计了基于RBF神经网络的微机械陀螺仪温度控制系统。首先,构建了微机械陀螺仪温度控制装置的数学模型;其次,鉴于控制模型参数会随温度改变而发生变化,提出了基于RBF神经网络的自适应PID控制算法,利用径向基函数的局部逼近能力调节微机械陀螺仪环境温度。结果表明,设计方案基于RBF神经网络,可实时整定PID参数,且能够准确控制微机械陀螺仪的温度。与传统PID控制相比,基于RBF神经网络的自适应PID控制算法具有更快的调节速度和较强的鲁棒性,实现了微机械陀螺仪温度的无静差控制,降低了模型参数变化对控制效果的影响,满足温度控制系统的要求。
关键词:自动化仪器仪表与装置;微机械陀螺仪;神经网络;温度控制;PID
中图分类号:TK323 文献标志码:A
文章编号:1008-1534(2018)05-0311-06
微机械陀螺仪具有体积小、重量轻、功耗低、可靠性高的优点。在导弹制导,飞机及卫星飞行姿态控制,医疗机器人控制,汽车的自动巡航和辅助驾驶系统等军事和民用领域都具有广阔的应用前景[1-4]。微机械陀螺仪由单晶硅片制成,利用微弱信号检测电路产生输出,所以温度的变化会使微机械陀螺仪机械结构与电气特性发生改变,使微机械陀螺仪输出产生误差,发生零点温度漂移,大大影响了微机械陀螺仪的输出性能[5-8]。为了提高微机械陀螺仪的工作稳定性与可靠性,需要将微机械陀螺仪的工作温度控制为恒定值,使其不受环境温度影响,从而消除温度误差[9-11]。
传统的微机械陀螺仪温度控制通常采用PID或积分分离式PID等算法,但是传统的PID算法应用于微机械陀螺仪温度控制系统时会存在明显不足之处:PID控制算法是一种基于被控对象精确数学模型的算法,而当微机械陀螺仪系统温度发生变化时,模型参数会随之变化,然而PID参数无法随之调整,导致控制精度变差[12-14]。针对这种不足,本文采用基于RBF神经网络的PID控制算法,利用神经网络的学习和自适应能力提高系统鲁棒性,构建具有参数自适应能力的PID控制器,实现微机械陀螺仪温度的准确控制。
1 微机械陀螺仪温度控制模型
微机械陀螺仪被放置于一个密封包装内部,内部电路通过真空电极与连接器和外界相连,如图1所示。密封装置内主要包含微机械陀螺仪、温度传感器、加热器、连接器等,在进行控制系统设计时,将其整体作为广义被控对象进行分析。系统要求能够对微机械陀螺仪在全温范围内(-20~80 ℃)进行控制,设定温度值为45 ℃,波动范围不超过±0.1 ℃。
对广义被控对象进行分析,以电极电压为输入,以微机械陀螺仪温度为输出,建立系统的数学模型。在被控系统温度为0 ℃条件下,在加热器两端施加阶跃电压,并通过温度传感器检测系统温度变化过程,得到的阶跃响应曲线如图2所示。
根据系统阶跃响应曲线,同时为了简化对象模型,方便控制器设计,将控制对象近似为一阶惯性加纯滞后系统,其传递函数为
外加干扰和温度会改变系统传递函数中的K值。K值波动范围在±0.5%之间。
2 基于RBF神经网络的PID控制算法
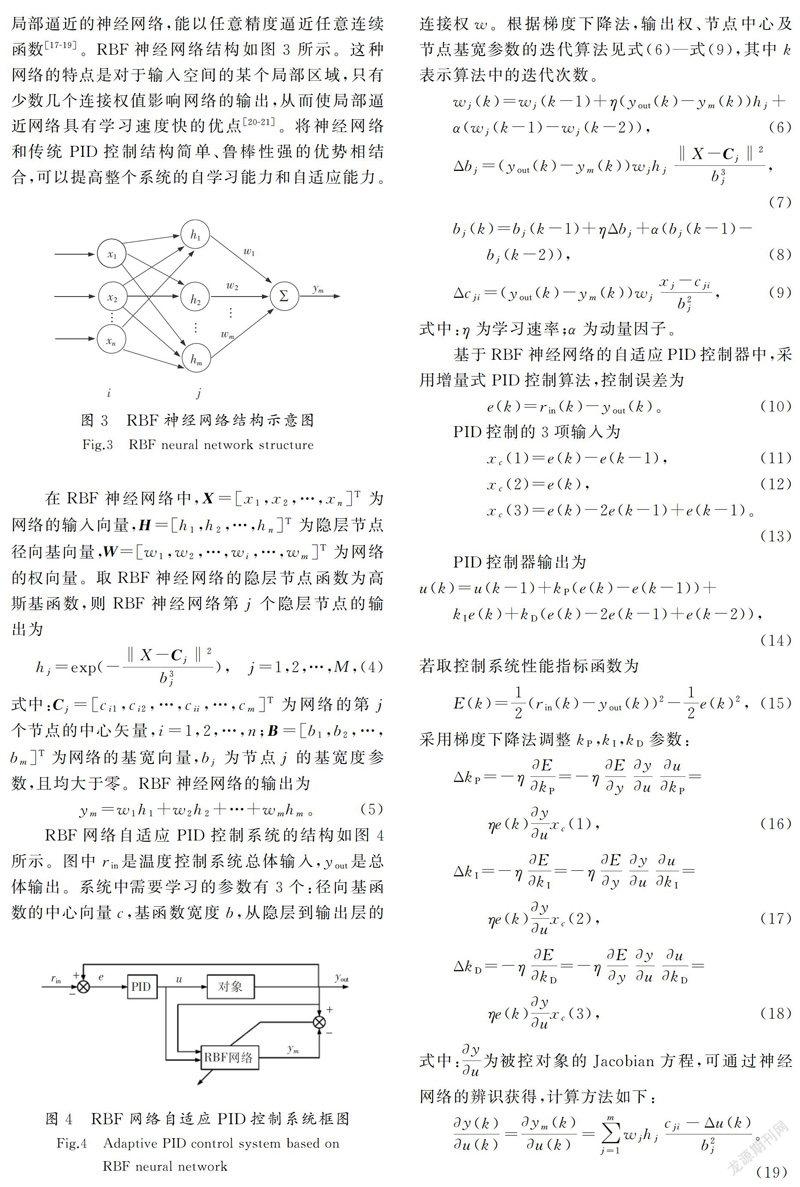
本系统采用基于RBF神经网络的PID算法控制微机械陀螺仪的温度。RBF(radial basis function)神经网络是一种具有单隐层的3层前馈的局部逼近的神经网络,能以任意精度逼近任意连续函数[17-19]。RBF神经网络结构如图3所示。这种网络的特点是对于输入空间的某个局部区域,只有少数几个连接权值影响网络的输出,从而使局部逼近网络具有学习速度快的优点[20-21]。将神经网络和传统PID控制结构简单、鲁棒性强的优势相结合,可以提高整个系统的自学习能力和自适应能力。
Jacobian方程(19)表征神经网络输出对控制输入的灵敏度。
3 系统仿真
利用Matlab软件构建控制系统模型,在初始条件为0 ℃的情况下,取设定温度值为45 ℃,采用传统PID控制算法,控制参数为kP=0.1,kI=0.015,kD=0.15,仿真结果如图5所示。可以得到系统超调量为22%,调节时间为20 s,不能满足微机械陀螺仪温度性能要求。
采用基于RBF网络的自适应PID控制得到仿真结果如图6所示。可见,该控制算法可以实现无超调调节,将温度无静差地控制在45 ℃,此外,基于RBF神经网络的自适应PID控制算法可以实现PID参数的自动调节,并具有比传统PID更快的调节速度,调节时间缩短为14 s。
圖7中3条曲线分别表示kP,kI,kD 3个参数在温度调节过程中的变化情况,控制启动后10 s系统达到稳定状态,控制参数终值分别为kP=0.221,kI=0.019,kD=0.198。可以明显看出,在温度调节过程中,RBF神经网络实现了对控制参数的动态调节。
进一步分析基于RBF神经网络的自适应PID控制算法的鲁棒性,当系统调节达到稳定状态时,在t=22 s改变模型放大系数K,使得ΔK=0.2,仿真结果如图8所示,经过10 s,系统通过参数的整定恢复稳定状态。图9为温度调节过程中PID参数的变化情况。在放大系数K值改变后,PID控制参数kP,kI,kD随之变化,在短暂调整后恢复稳定状态,kP=0.268,kI=0.023,kD=0.21。由仿真结果可知,在对象模型参数发生变化时,控制系统能够通过神经网络实现自适应调节和快速无静差控制,证实了该温度控制系统具有良好的鲁棒性。
4 结 语
1) 以微机械陀螺仪的温度控制为研究目标,将RBF神经网络与PID控制方法相结合,设计了基于RBF神经网络的微机械陀螺仪温度控制系统。以微机械陀螺仪温度控制装置作为被控对象,建立系统的数学模型。
2) 采用传统PID算法对微机械陀螺仪温度进行控制,发现系统超调量较大,调节时间较长,不能满足微机械陀螺仪温度性能要求。在此基础上,提出了自适应PID控制算法,利用RBF神经网络整定PID参数,实现了微机械陀螺仪温度的无静差控制,并缩短了调节时间,满足温度控制系统要求。此外,该系统具有较强的鲁棒性,能够有效降低模型参数变化对控制效果的影响。
3) 有关RBF神经网络控制算法的改进研究尚未开展,今后将对此进行进一步的探索。
参考文献/References:
[1] 刘楠, 苏言, 童鑫, 等. 硅微机械陀螺仪温度补偿方法的研究现状[J]. 微纳电子技术, 2017, 54(6): 395-400.
LIU Nan, SU Yan, TONG Xin, et al. Research status of temperature compensation methods for silicon micro-electromechanical gyroscopes[J]. Micro-nanoelectronic Technology, 2017, 54(6): 395-400.
[2] 付强, 尹亮, 陈伟平, 等. 带温度补偿的低温漂石英微机械陀螺接口ASIC设计[J]. 光学精密工程,2017, 25(7): 1843-1849.
FU Qiang, YIN Liang, CHEN Weiping, et al. ASIC design of micro-mechanical gyro interface of low temperature drift quartz with temperature compensation[J]. Optics and Precision Engineering, 2017, 25(7):1843-1849.
[3] 盛霞, 王寿荣, 陈淑铃,等. 硅微机械陀螺仪温度控制系统的PID算法实现[J]. 测控技术,2010, 29(8): 4-8.
SHENG Xia, WANG Shourong, CHEN Shuling, et al. Temperature control system of silicon micromachined gyroscope realized by PID algorithm[J]. Measurement and Control Technology, 2010, 29(8): 4-8.
[4] 姜劭栋, 苏岩, 裘安萍, 等. 高真空环境下硅微机械陀螺品质因数的温度特性[J]. 光学精密工程, 2015, 23(7): 1990-1995.
JIANG Shaodong, SU Yan, QIU Anping, et al. Temperature characteristics of quality factor of silicon micromachined gyroscope under high-vacuum environment[J]. Optics and Precision Engineering, 2015, 23(7): 1990-1995.
[5] 魏泽松,张嘉易,郝永平,等. 温度对IMU微机械陀螺仪零偏影响及标定补偿[J]. 国外电子测量技术, 2011, 30(1): 9-13.
WEI Zesong, ZHANG Jiayi, HAO Yongping, et al. Impact of temperature on zero bias of IMU MEMS gyroscope and its calibration compensation[J]. Foreign Electronic Measurement Technology, 2011, 30(1): 9-13.
[6] 杨亮, 苏岩, 裘安萍, 等. 高品质因数微机械陀螺的温度自补偿[J]. 光学精密工程, 2013, 21(11): 2870-2876.
YANG Liang, SU Yan, QIU Anping, et al. Self-temperature compensation for high quality factor micro-machined gyroscope[J]. Optics and Precision Engineering, 2013, 21(11): 2870-2876.
[7] LI Wenyin, XIAO Dingbang, WU Xuezhong, et al. Enhanced temperature stability of sensitivity for MEMS gyroscope based on frequency mismatch control[J]. Microsystem Technologies Micro and Nanosystems Information Storage and Processing Systems, 2017, 23(8): 3311-3317.
[8] 徐鴻卓, 吴立锋, 严庆文, 等. 温度对无驱动结构硅微机械陀螺信号相位差的影响[J]. 仪表技术与传感器, 2009 (sup1): 309-312.
XU Hongzhuo, WU Lifeng, YAN Qingwen, et al. Temperature effects on the phase difference of non-driven constructor silicon micro-machined gyroscope[J]. Instrument Technique and Sensor, 2009(sup1): 309-312.
[9] FU Qiang, DI Xinpeng, CHEN Weiping, et al. A temperature characteristic research and compensation design for micro-machined gyroscope[J]. Modern Physics Letters B, 2017, 31(6):83-88.
[10]陈淑铃,杨波,王寿荣. Z轴硅微机械陀螺仪温度特性研究[J]. 电子器件, 2008, 31(6): 1753-1756.
CHEN Shuling, YANG Bo, WANG Shourong. Research on thermal characteristic of Z-input silicon micromachined gyroscope[J]. Chinese Journal of Electron Devices, 2008, 31(6): 1753-1756.
[11]陈怀, 张嵘, 周斌, 等.微机械陀螺仪温度特性及补偿算法研究[J]. 传感器技术, 2004, 23(10):24-26.
CHEN Huai, ZHANG Rong, ZHOU Bin, et al. Research on thermal characteristic and compensation algorithm for MEMS-gyroscope[J]. Journal of Transducer Technology, 2004, 23(10): 24-26.
[12]SALVIA J C, MELAMUD R, CHANDORKAR S A, et al. Real-time temperature compensation of MEMS oscillators using an integrated micro-oven and a phase-locked loop[J]. J Microelectromech Syst, 2010, 19(1): 192-201.
[13]温祖强, 钱峰. 微机械陀螺温度特性及其补偿算法研究[J]. 电子测量技术, 2011, 34(1): 51-54.
WEN Zuqiang, QIAN Feng. Reseach of thermal characteristic and compensation algorithm for MEMS-gyronscope[J]. Electronic Measurement Technology, 2011, 34(1): 51-54.
[14]夏国明, 王寿荣, 杨波. 硅微机械陀螺表头温度特性研究与测试[J]. 测控技术, 2009, 28(9): 9-13.
XIA Guoming, WANG Shourong, YANG Bo. Research and test on silicon micro-gyroscope temperature characteristic[J]. Measurement and Control Technology, 2009, 28(9): 9-13.
[15]曹慧亮, 杨波, 徐露, 等.MEMS陀螺仪芯片级温控系统的设计[J]. 东南大学学报(自然科学版),2013,43(1):55-59.
CAO Huiliang, YANG Bo, XU Lu, et al.Design of on-chip temperature-controlling system for MEMS vibratory gyroscope[J]. Journal of Southeast University (Natural Science Edition), 2013,43(1):55-59.
[16]陈浩广,王银河, 王东晓. 一类带有监督控制的神经网络自适应跟踪设计[J]. 工业控制计算机, 2017, 30(9): 58-60.
CHEN Haoguang, WANG Yinhe, WANG Dongxiao. Design of adaptive neural tracking with supervisory control[J]. Industrial Control Computer, 2017, 30(9): 58-60.
[17]史磊,王蔚. 基于RBF神经网络PID参数的自调节及仿真[J]. 科技与创新, 2017(16): 64-66.
SHI Lei, WANG Wei. Self - tuning and Simulation of PID parameters based on RBF neural network [J]. Science and Technology & Innovation, 2017 (16):64-66.
[18] 乔俊飞, 韩红桂. RBF神经网络的结构动态优化设计[J].自动化学报, 2010, 36(6): 865-872.
QIAO Junfei, HAN Honggui. Optimal structure design for RBFNN structure [J]. Acta Automatica Sinica, 2010, 36(6): 865-872.
[19]申超群,楊静. 温室温度控制系统的RBF神经网络PID控制[J]. 控制工程, 2017, 24(2): 361-364.
SHEN Chaoqun, YANG Jing. RBF neural network PID control for greenhouse temperature control system[J]. Control Engineering of China, 2017, 24(2): 361-364.
[20]刘苏苏, 孙立民. 支持向量机与RBF神经网络回归性能比较研究[J]. 计算机工程与设计, 2011, 32(12): 4202-4205.
LIU Susu, SUN Limin. Performance comparison of regression prediction on support vector machine and RBF neural network[J]. Computer Engineering and Design, 2011, 32(12): 4202-4205.
[21]张顶学, 刘新芝, 关治洪. RBF神经网络算法及其应用[J]. 石油化工高等学校学报, 2007,20(3): 86-88.
ZHANG Dingxin, LIU Xinzhi, GUAN Zhihong. Radial basis function neural network algorithm and its application[J]. Journal of Petrochemical Universities, 2007, 20(3): 86-88.
猜你喜欢
中国教育信息化·高教职教(2022年4期)2022-05-13
计算技术与自动化(2022年1期)2022-04-15
煤气与热力(2022年2期)2022-03-09
小学阅读指南·低年级版(2020年10期)2020-10-12
软件(2017年6期)2017-09-23
建筑建材装饰(2016年13期)2017-01-04
建筑建材装饰(2016年9期)2016-12-29
