数字控制的移相全桥变换器均流实现
2018-09-08 07:45:10姜婷婷刘晓东
铜陵学院学报 2018年3期
姜婷婷 刘晓东
(1.铜陵学院,安徽 铜陵 244061;2.安徽工业大学,安徽 马鞍山 243002)
一、引言
开关电源并联均流技术利用多模块共同分担负载功率,每个模块只需提供功率的1/N,从而减小了功率器件的承受的热应力和电气应力,提高了系统可靠性,并能缩短开发周期和降低生产成本[1]。移相全桥变换器因其显著特点,目前已经在中大功率场合得到了广泛的应用[2][3]。
对于移相全桥变换器并联均流系统,模拟控制方面李旭东等人[4]采用专用的芯片UC3875来实现移相,虽高效可靠,但控制精度不够;数字控制方面曾敏等人[5]采用CAN总线通讯的自动选主主从均流法,但CAN总线仍存在不可预测性出错和信道出错等漏洞。而本文选用32位单片机STM32F207[6],此控制器具有2个DMA控制器,提供存储器和存储器之间或外设和存储器之间的高速数据传输。通过DMA实现数据快速传输,无需CPU的干预,这就节省了CPU的资源,可减小数据采样对控制算法程序执行时间的占用,有效改善均流数据获得和处理的实时性,提高均流控制精度。
因此本文提出了一种适用于数字均流控制的快速采样方法,适用于用单个控制器同时实现2个或以上电源模块并联均流控制。最后利用计数延时法[7]进行了双移相全桥变换器平均电流三环控制法[8]均流实验,实验结果说明此方法实现均流是可行的,且操作方便高效,均流误差达到要求。
二、数字均流原理及其分析
基于计数延时法的双模块 (移相全桥变换器)数字均流控制电路结构由主电路,驱动电路,信号调理电路及数字控制电路四部分组成,如图1所示。主电路为全桥变换器基本拓扑,其中模块1超前桥臂为Q1和Q3,滞后桥臂为Q2和Q4,模块2四个桥臂分别为Q5、Q6、Q7和Q8,Q1和Q3分别超前Q4和Q2一个相位,即移相角θ(0。~180。),通过调节各模块移相角来调节对应模块输出电流和电压值。另外,为防止每个桥臂的上下开关管直通,上下开关管180。互补导通时需插入死区时间[9]。
信号调理电路负责将电路的电压和电流检测量采样处理后输入数字控制器。因STM32F207的DMA控制器,每个DMA控制器各有7个通道,每个通道专门用来管理来自于一个或多个外设对存储器访问的请求,各个请求的优先级可以通过软件编程设置,且可编程的数据传输数目最大为65536。则2个移相全桥变换器输入端和输出端并联在一起,需对输出电压Vo,Vo输出电流Io1和Io2隔离采样后送入控制器的输入引脚进行模数转换(ADC),采样后的数据通过DMA控制器直接从外设ADC传输到存储器,可实现数据的快速传输。
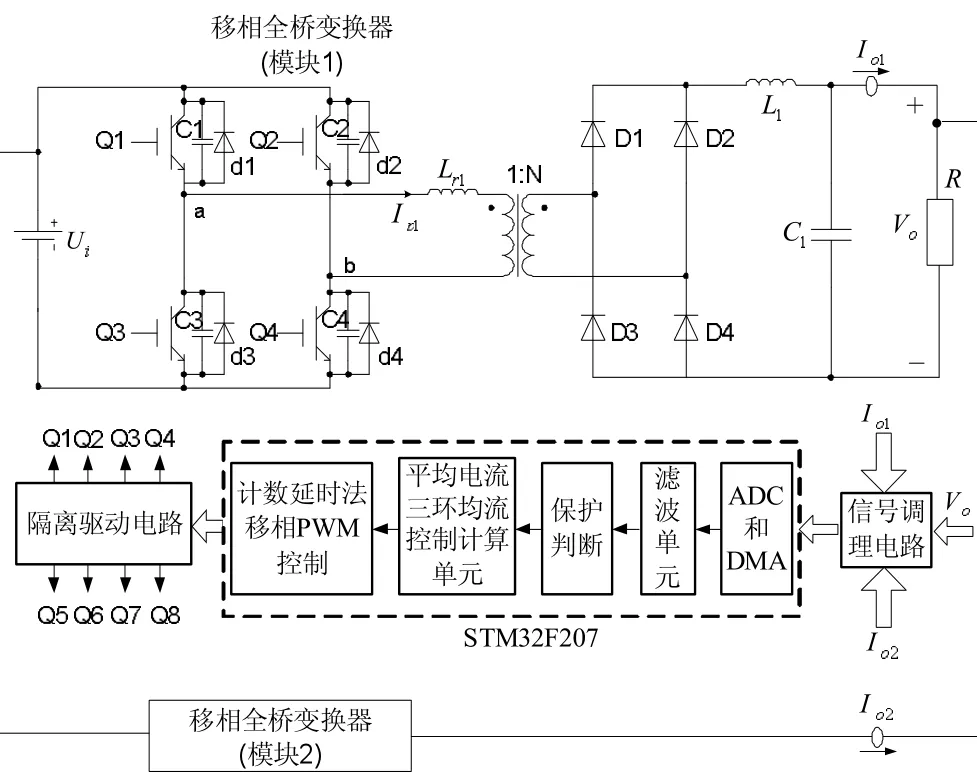
图1 数字均流并联移相全桥变换器控制系统结构框图
每个电源模块都有相应的控制部分,均流控制策略采用平均电流法三环控制,其中均流环和电压环调节的同时也会使得输出电流的稳态精度有所下降,需设置均流环和电压环动态调节的范围,使均流环与电压环误差之和保持在容许范围内[10],三环补偿均采用传统位置式PID控制算法,最终PID调节输出进行限幅,以免PID调节输出的值过大,对系统造成危害,最后电流环输出后的值经过移相PWM控制环节,但给定的值需限定在移相角计数值数量级上,另外通过配置控制器主从定时器,设置计数延时时间(决定移相角大小),但具体值需要进行调整,以保证移相角在0。到180。范围内,可在线调整,最后利用计数延时法来调整各个模块θ大小来调节各个模块输出电流,完成均流控制。
三、移相PWM波产生
(一)主电路驱动信号设计
STM32F207控制器实现双移相全桥变换器均流控制时,需用到6个定时器,分别为2个高级定时器1和8(TIM1和TIM8)和4个通用定时器,采用两种移相角产生方案[7],其中模块1采用高级定时器,模块2结合采用了高级和通用定时器。
模块1的四路PWM波产生中,TIM1为主定时器,TIM8为从定时器,TIM1通道2(TIM1_CH2)为移相角产生通道,写入通道TIM1_CCR2的值CCR1_Val决定模块1移相角大小。模块2的四路PWM波产生中,超前臂的控制信号与模块1来源相同,都是由TIM1通道1产生,只不过写入TIM1_CCR2的值定义变量CCR1_Val1表示。对于滞后臂Q4,TIM4通道1作为滞后臂的下桥臂PWM输出,选用TIM3作为TIM4的主定时器,写入TIM3_CCR2的值CCR1_Val2决定模块2移相角大小,而对于另一路与之互补输出PWM波的产生,配置TIM2为主定时器,TIM5为从定时器,且写入TIM2_CCR2的移相角设定值需比CCR1_Val2大半个开关周期值(1/2(Period-1))(其中Period为周期值),以实现滞后臂Q4与Q2的互补。
(二)移相角参数调整以及数字移相精度
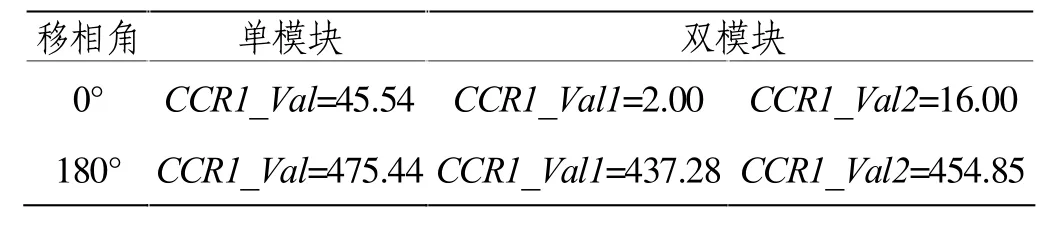
表1 移相角计数值调整结果
因移相角为0°~180°,如表1,选取单模块工作时的移相角计数值调整结果,计算对应的数字延迟量为(475.44-45.54)≈430,则移相精度为:

即计数器计数每增加或减小1,则移相角改变0.42°。而此时最小移相占空比Dmin为:

可实现较高均流精度。
四、信号采样和软件实现
数字采样不可能达到实时采样的效果[11],即使加大采样频率,采样数据的读取必然以牺牲时钟周期数为代价,故对于需要实时采样均流信息且需同时处理两个模块均流控制的PID控制算法数据,需要实现快速采样,如整个程序流程图如图2所示,含有AD采样、DMA传输的初始化程序,同时定时器初始化程序里具有两个模块的各四个驱动信号的配置,此程序还包括与移相角产生有关的主从定时器的配置。而整个均流控制算法的实现是在AD中断中完成,进行移相角的更新实现均流控制,如图3所示。
(一)ADC和DMA配置
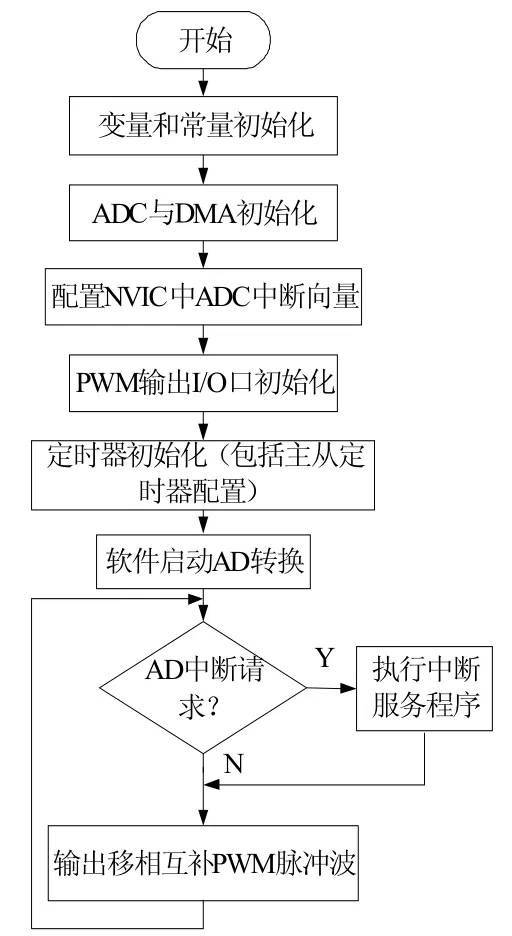
图2 主程序流程图
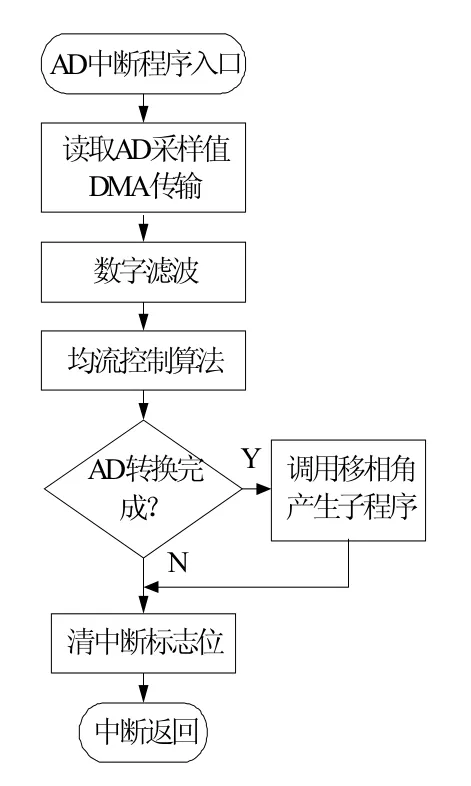
图3 AD中断程序流程图
AD转换和DMA初始化配置需要综合考虑,两者密不可分,课题中有3路采样信号,分别是系统输出电压,两模块输出电流,采用3通道顺序采样。使能ADC3转换,配置ADC3工作在扫描连续模式,设定要转换的ADC3通道数目以及采样先后顺序,课题中设置采样顺序为Vo、Io1和Io2,对应的采样与处理后的值如图3所示。定义二维数组ADC3ConvertedValue[N][M]存储AD采样值,其中N为采样次数,M为采样通道数,对应数字滤波后的值存储在一维数组After_filter[M]中,而数模转化后的值存储在数组ADC3ConvertedVoltage[M]中,用于后续PID控制处理。
本课题中DMA时钟来自AHB总线,达到CPU运行频率120MHz。DMA选择外设ADC到存储器的数据传输,选择DMA2通道2(MA_Channel_2),传输数据量由采样通道数和每个通道采样次数之积M*N决定,此值通过DMA_CCRx寄存器中的PSIZE和MSIZE位设置,且为了配合ADC的扫描模式,DMA工作在循环缓存模式,此模式下,当1组通道传输结束后将从第1个通道开始继续传输,亦称为DMA“乒乓”模式。最后要设置外设和存储器的增量模式,我们将ADC设置为非增量模式,即从固定外设地址取值,即告诉DMA从一个固定的地方取数,在用户手册中可查找到ADC3起始地址(ADC3_DR_ADDRESS)为 0x4001224C;而存储器设置为增量模式,即传输一个数据之后,内存指针自增,下一个数据自动传输到指针所指内存空间,避免丢失已经存储在ADC_DR寄存器中的数据。
ADC转换的频率由总转换时间来衡量,总转换时间计算公式:

其中ADC采样时间最短为3个时钟周期,若采样时间为3时,则对应的转换时间为:

由式4得出总转换时间是 0.25μs,采样频率为4MHz,即最大采样频率为为4MHz,课题中设置采样时间为 15,则

采样频率达到2.2MHz,且两个转换之间也有间隔时间,分别为5~20个时钟周期,可由用户选择,两个数据转换之间最短时间为5个时钟周期,故第一个数据采样频率为0.45μs,则第二个数据采样频率约为0.53μs,以此看出采用DMA快速传输可大大加快采样频率,满足工程需求。
(二)ADC中断程序
ADC中断程序首先实现对2路电流和输出电压的采样,然后进行数字滤波和平均电流值的计算,再将经过三环均流控制算法计算出的移相角赋值给CCR1_Val1和CCR1_Val2,其中 rout1、rout2分别为模块1、2经过各自三环PID控制后的值,为了避免三环PID调节输出的值过大,对系统造成危害,最后电流环输出后的值再经过一个比例环节,将其值限定在移相角计数值数量级上,此值取为0.000025。需要在AD中断函数中添加移相角配置和三环(电流环,电压环和均流环)PID控制程序,通过主程序检测更新,若检测到写入通道的值发生改变,则 TIM1_CCR2,TIM3_CCR2,TIM2_CCR2将被更新,可实时改变移相角CCR1_Val1和CCR1_Val2的大小,使两模块的电流值达到平均电流值。
五、实验结果
为了验证文章上述设计,搭建了基于STM32F207的实验平台如图5所示,移相全桥变换器样机技术指标:输入电压600V,最大输出电压500V,输出功率4 kW,工作频率20kHz。样机由两个相同功率级相同的DC/DC变换器组成。而输出电压波形经过分压电阻后的信号,而输出电流波形是经过霍尔传感器转换后的信号。其中,输出电压100V对应采样电压为500mV,而输出电流1A对应采样电压为330mV。
表2是系统稳态实验结果,表2分别记录了负载在25%到100%之间变化时,两个电源模块开环控制和采用均流控制时的稳态输出电流,计算并给出了不同电流值对应的CSerr。由表2所示,未采用均流控制前,随着负载的减小,模块输出电流差异越来越大,不符合并联均流设计要求;采用均流控制后,在不同的负载情况下,两个模块基本分担电流,达到均流控制的目的。图4(a)、(b)为输出电压500V,输出电流分别为8A和16A时并联模块输出稳态波形。从图中可看出并联模块输出电流几乎平均分配总输出电流,CSerr小于4%。
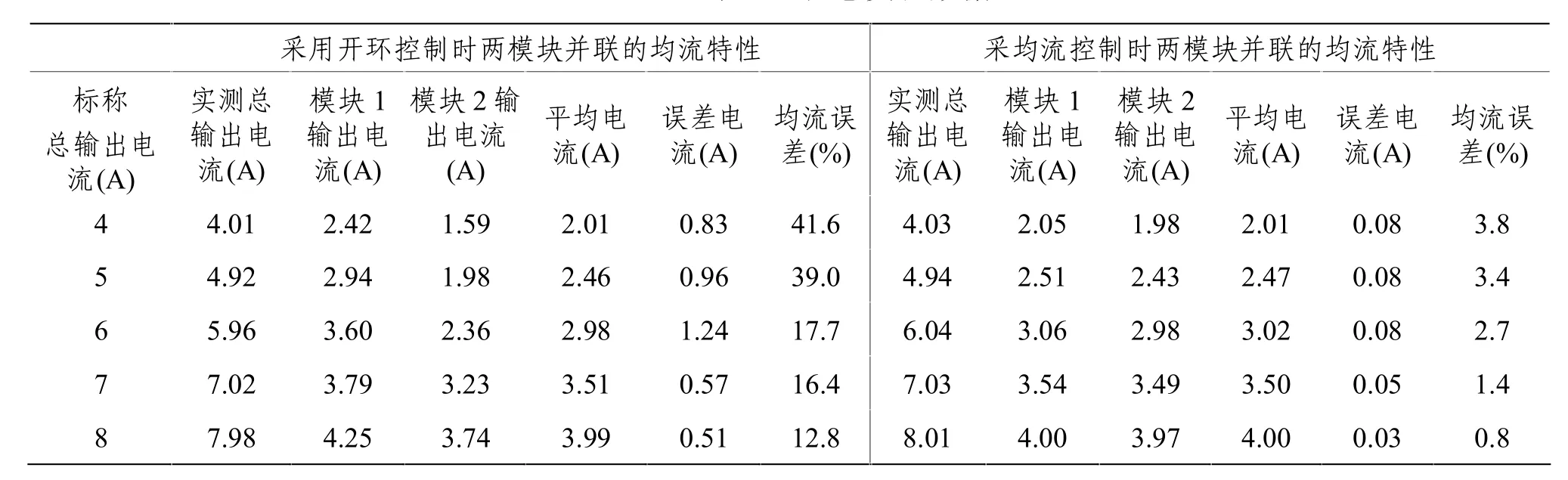
表2 稳态实验数据
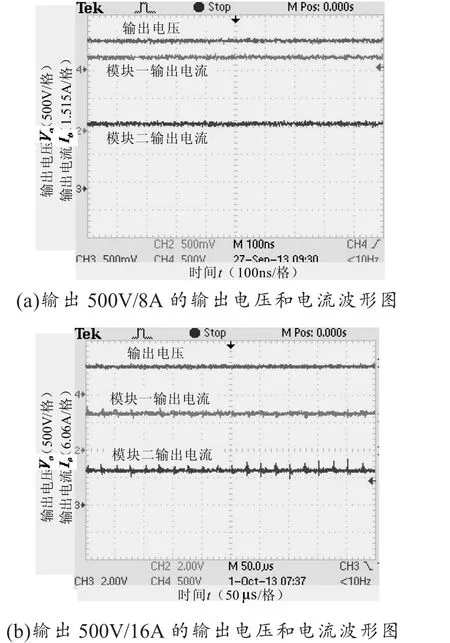
图4 并联系统稳态波形
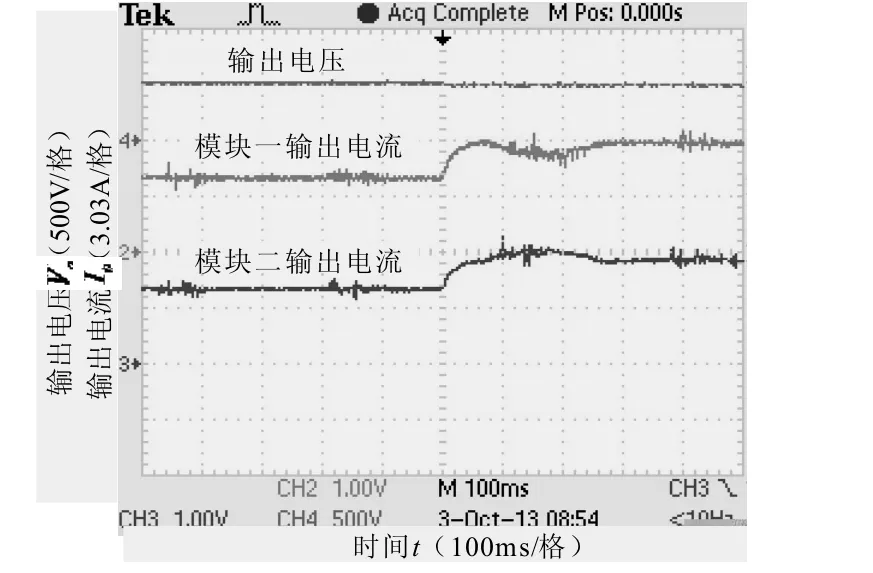
图5 负载跳变波形图(8A突升至12A)
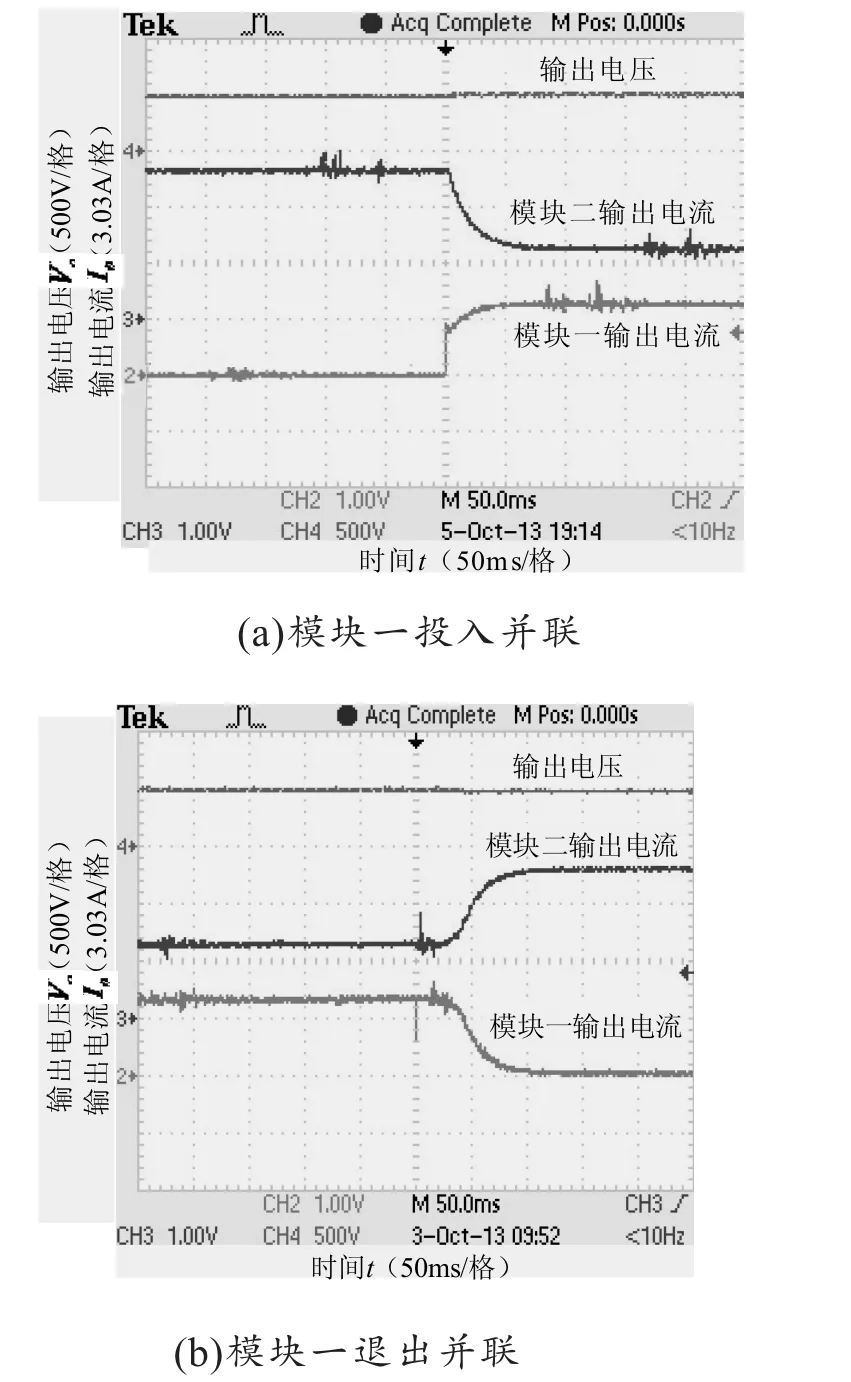
图6 动态切换波形图(总负载电流为8A)
图5为两个模块突加负载时的实验波形,可看出跳变前后电流值都均等,图6为动态切换实验波形,分为投入并联和退出并联两种情况,并联系统在突然投入或切除某一模块时仍可以保持稳定工作,各模块输出电流值均在正常范围内,且无明显过冲。可见应用此快速采样法实现移相全桥变换器平均电流三环控制均流可行,均流效果良好,且具有很强的热插拔。
六、结论
提出了一种基于DMA数据传输的快速采样法,利用计数延时法实现了2个移相全桥变换器的并联均流控制。利用控制器内部DMA控制器与ADC结合的快速采样法,在数据收集和处理的实时性上更具优势,双模块样机实验得出有无均流控制的两组实验数据,通过对比得出采用此快速采样法来实现均流是可行的,同时给出均流稳态和动态实验波形,从中看出可以很好地完成电源模块的并联均流控制,在简化移相全桥变换器数字均流控制方面具有参考价值。
猜你喜欢
数学小灵通(1-2年级)(2022年12期)2022-12-23 05:38:18
中国自行车(2022年6期)2022-10-29 01:59:10
电工技术学报(2021年9期)2021-05-12 06:33:40
通信电源技术(2018年3期)2018-06-26 08:05:42
电子测试(2018年4期)2018-05-09 07:27:53
电子制作(2018年1期)2018-04-04 01:48:40
中国-东盟博览(政经版)(2017年5期)2017-05-08 09:21:19
读写算(上)(2016年4期)2016-12-01 03:19:52
西安工程大学学报(2016年2期)2016-06-05 12:25:17
电测与仪表(2016年6期)2016-04-11 12:06:14