
RKE无法可靠唤醒BCM问题分析与改进
2018-09-06 02:18方遒王顺伟周鹏
汽车实用技术 2018年16期
方遒,王顺伟,周鹏
RKE无法可靠唤醒BCM问题分析与改进
方遒1,2,王顺伟1,周鹏1
(1.厦门理工学院机械与汽车工程学院,福建 厦门 361024; 2.福建省客车及特种车辆研发协同创新中心,福建 厦门 361024)
针对某车RKE会出现无法可靠唤醒BCM的问题,在模拟实车安装环境的条件下对故障件进行了大量测试,从理论分析与实际测试两方面总结出产生无法可靠唤醒的主要原因,并提出了解决此问题的软件方案和硬件方案。最后经过大量实车测试验证发现,优化同步码的软件方案能够解决该问题。本文阐述了从故障排查到解决问题的全过程。
RKE;抗干扰;同步码
引言
RKE(Remote keyless entry system)省去了人手摸钥匙、把钥匙插入锁孔、转动钥匙等一系列动作[1],允许用户只需按下按键就能实现无钥匙解锁车辆、寻车、照明、伴我回家、上锁车辆等功能,给用户带来了极大的便利。但是在如今的嘈杂环境中,会存在各种无线电干扰和同频干扰,这种干扰将导致BCM(Body control module)无法接收到合法的信号从而导致BCM无法执行遥控功能。某车身控制器在实际装车后会出现BCM无法可靠唤醒的问题,从理论角度分析出可能导致该问题的所有原因,并经实际测试验证后得出产生该问题的主要原因是RKE发送的数据帧受到了外部干扰。针对此问题提出了软件和硬件抗干扰的方案,经过大量的测试验证得出软件同步码优化为符合曼彻斯特码编码要求的软件方案解决了此问题。
1 RKE系统简介
1.1 RKE模块的基本原理介绍
当用户按下RKE按键时,RKE模块会发送一串数据流该数据流由前导码、同步头、起始位、64bit数据等几部分组成。发射器根据需要发送的数据格式编写出普通电平信号,然后将该信号运用调制电路调制并转换成对应的高频信号通过曼彻斯特码进行编码并发送出去,BCM接收端通过天线接收RKE系统发送的高频信号并传送给主控MCU(Microcon -troller Unit),MCU对接收到的信号进行逻辑判断。如果接收到符合要求的数据将对接收到的数据进行解调并进行解码得到原来的控制电信号,通过判断解码的电信号去执行对应的遥控功能。
1.2 RF(Radio Frequency)数据发送格式
RKE的数据发送采用曼彻斯特码编码的方式,1bit的周期为600us占空比为50%。每按一次RKE按键就发送四帧RF数据如图1所示,其数据格式为占空比为50%的前导码+同步码+起始位+DATA(一个32位固定数据和一个32位加密数据)+帧与帧之间的防护周期。

图1 RF数据格式
2 BCM无法可靠唤醒问题分析
在BCM装车且门锁关闭后围绕汽车周围按压RKE任一按键会出现无法唤醒BCM和遥控功能不灵敏的现象且在汽车的不同角度按压RKE按键遥控距离会不一样,在汽车前方的遥控距离会大于后方的遥控距离。从以上问题出发理论分析导致BCM无法可靠唤醒的原因有以下几个方面:
表1 BCM无法可靠唤醒的原因
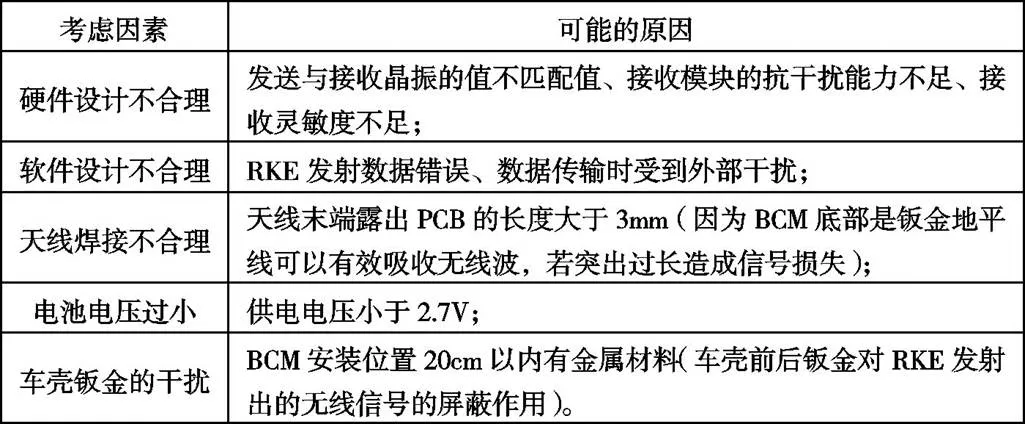
3 故障点排查
从所有的故障件中随机抽取4只BCM故障件,对以上可能导致BCM无法近距离唤醒的原因依次进行分析与测试。先对天线进行排查,天线末端露出PCB的理论长度要求小于3mm,但实际测量时发现均大于3mm(如表2所示)。将其末端露出PCB的长度剪短并用2只RKE依次对每只BCM进行遥控距离测试,每次测试完后更换RKE电池并测量其电压值其电压值均大于供电电压2.7V,根据测试结果发现依然会出现无法执行遥控功能和遥控不灵敏的现象,由以上结论得知可排除天线末端露出PCB板长度和供电电压过小对BCM无法可靠唤醒的影响。在排查车身钣金对BCM无法可靠唤醒的影响时发现,钣金的厚度对BCM的遥控距离有很大的影响,钣金越厚BCM的遥控距离越近。
表2 天线末端露出PCB的长度

下面将从硬件和软件设计两个角度对故障进行排查,RF接收模块采用的是英飞凌DTA5210高频接收芯片,此芯片晶振的理论计算值为:
=( 433.92MHZ-10.7MHZ)/64=6.6128MHZ
4只故障件RF模块选用的晶振值均为6.6128MHZ,并利用信号发生器对4只故障件的灵敏度进行测试,测试值分别为-94dBm、-96.5 dBm、-94.7 dBm、-97.3 dBm,由以上晶振的选用值和测试的灵敏度可知晶振与接收灵敏度均符合要求可排除其对BCM无法可靠唤醒的影响。在对软件代码排查时发现RKE发送数据的前导码为72*300us=21.6ms,而BCM的唤醒扫描周期为100+6=106ms,21.6<106,若21.6ms刚好落在6ms检测时间之外将会导致BCM无法检测到有效的前导码而无法去执行遥控功能。当出现无法执行遥控功能时采用示波器去分别捕获RKE发送数据脚(如图2)和RF接收模块数据脚(如图3)的波形,同时用频谱分析仪测量RKE的工作频率(如图4)。从图2可以看出RKE发射端的波形正常,而图3接收端起始位的占空比已经失真,从图4可以看在我们使用频率433.92MHz的B点附近出现外部干扰信号A。

图2 RKE数据脚波形图

图3 RF接收模块数据脚波形图
综合以上的分析与测试结果可以得出,导致RKE无法可靠唤醒BCM原因可能有以下两个:RKE前导码时间与BCM的唤醒周期匹配不佳和RKE的发射数据受到了外部干扰。

图4 外部干扰频率
4 BCM无法可靠唤醒改善方案
4.1 匹配RKE前导码时间与BCM唤醒周期方案设计

图5 前导码拉长为108ms波形图
通过对软件代码进行分析,由于RKE前导码时间与BCM唤醒周期不匹配,BCM检测到有效的前导码的概率降低从而导致遥控不灵敏的现象出现。现将数据流的前导码的时间延长并覆盖BCM的整个扫描唤醒周期,无论在BCM扫描唤醒周期的任何时间按下RKE按键都能使6ms的检测时间检测到有效的前导码,从而增大BCM的唤醒概率。通过分析代码实际情况决定将前导码的实际长度拉长为357*300 us=107.1ms(如图5所示)。
4.2 软件优化同步码抗干扰方案设计
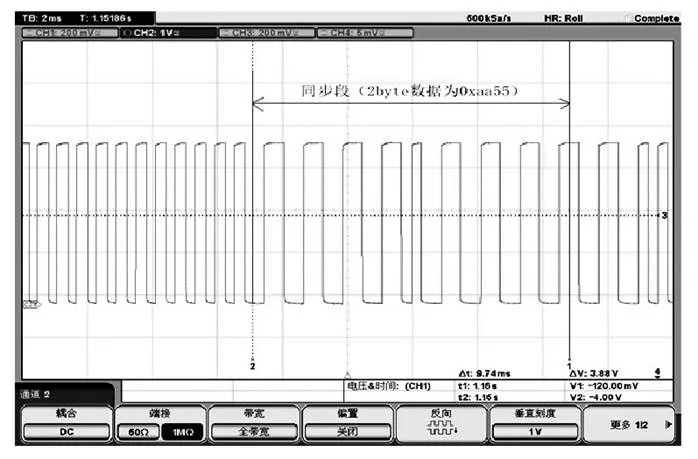
图6 优化同步段为0xaa55后的波形图
从上图3可知RF数据流的起始位的占空比严重失真,此时在RKE的工作频率433.92MHz附近存在外部干扰信号。据此可以分析出起始位占空比失真主要原因是由于同步码采用的3ms低电平的方式,此方式很容易受到了外界信号的干扰BCM会把干扰信号误检测为始位,即使后面的数据完全正确也会导致整包数据错误,最终导致BCM不能接收到正确的数据从而不能执行遥控功能。通过分析同步码应该采用满足曼彻斯特码编码要求的数据,此方式有较强的抗干扰能力,因此同步码应由3ms低电平更改为符合曼彻斯特码编码的0xaa55。同步码数据编码方式更改前,按一次遥控钥匙按键RKE发送四帧同样的数据,更改后第一帧帧发送107ms前导码、同步头为0xaa55、1bit起始位、64it数据,其余三帧发送2byte的前导码、同步头为0xaa55、1bit起始位、64it数据。因为每次按下按键后第一帧数据唤醒BCM的概率比较大,因此第一帧的前导码的时间较长。
4.3 硬件增加SAW抗干扰方案设计
起始位占空比失真是除了可能是软件的抗干扰能力差还有可能是硬件的抗干扰能力差,现从硬件的角度提出增加SAW滤波器的抗干扰方案。在RF接收模块采用B3721SAW滤波器过滤掉临近杂波或者二次谐波,防止杂波或者二次谐波对RKE发射模块发射的信号进行干扰。滤波电路如图7所示,主要由SAW滤波电路、为RF_ON提供使能的差分电路和信号放大电路组成。当天线接收到RKE发射过来的高频信号后通过SAW滤波器,因滤波器制造商采用滤波器中心频率两边0.5 dB、1 dB或3 dB衰减点来定义通频带的方法,因此在SAW滤波电路后应该有放大电路对信号进行放大,经过过滤及放大后的信号通过DTA5210的第3脚将高频信号传送给DTA5210。
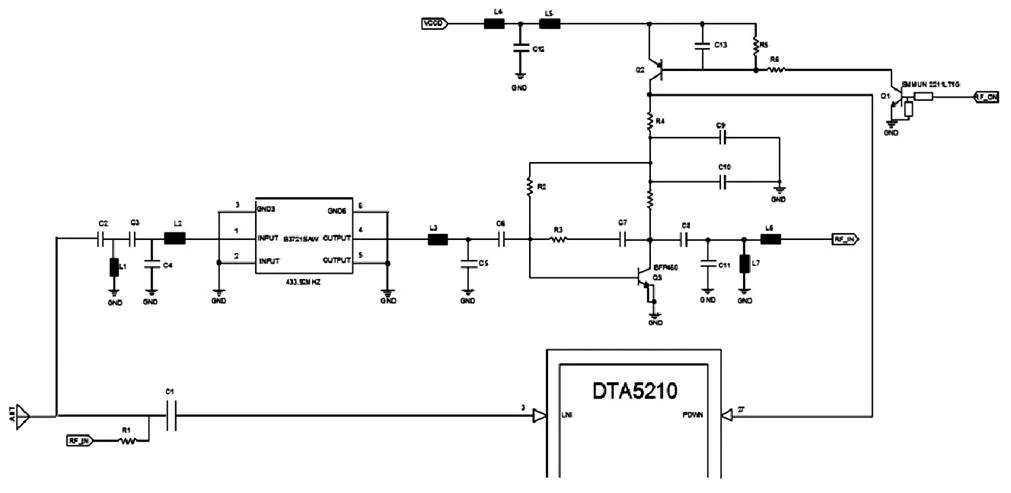
图7 增加SAW滤波器的RF接收模块
放大电路是由英飞凌BFP460三极管及其它器件组成的放大电路对信号进行放大。提高放大的稳定性是保持信号完整性的前提,造成放大器的静态工作点不稳定的主要原因是晶体管参数的变化,而晶体管参数的变化最终都反映在IC或者IE上。为了提高电路的稳定性和成批生产时的一致性,必须尽量减少工作电流对晶体管的参数的依赖性。发射极电阻RE可用于提高电路的稳定性,利用发射极电阻RE的电流负反馈作用可使电路稳定。采用BFP460 在发射极集成RE达到稳定效果。
5 测试方法及结果
5.1 测试方法
本测试主要分为硬件增加SAW滤波器+前导码延长为108ms和软件将同步码优化为0xaa55+前导码延长为108ms两种情况,测试时以22.5°为步长进行环绕测试,从而验证两种方案对RKE的抗干扰性能的影响。将所有唤醒源关闭,观察电源的电流降至0.01A时,由远(BCM无响应)到近(BCM响应)按压RKE开锁,如果有响应就等待BCM再次进入睡眠后再次按压RKE开锁,如此循环10次。确认开锁有效后然后验证闭锁并循环10次,验证闭锁方法同开锁,对多只BCM进行同样的测试。
5.2 测试结果

图8 软件优化后遥控距离雷达图
经过大量测试得出,硬件增加SAW滤波器+前导码拉长为108ms的方案对BCM无法可靠唤醒的问题基本没有改善。而将软件同步段优化为0xaa55+前导码拉长为108ms的方案对BCM无法可靠唤醒的问题有了很大的改善基本可以达到客户的要求,实际测量遥控距离值如图8所示。遥控距离大于20米以20米记录,不足20米记录实际距离,下图红色区域为遥控距离不能达到20米。由于BCM安装在车身右前方在车身后方测试时车上的钣金会对遥控信号有一定的屏蔽作用,因此车后方的遥控距离小于前方的遥控距离。
6 结论
首先理论分析了导致BCM无法可靠唤醒的各种原因,经过测试发现RKE起始位受到了外部信号的干扰而失真,然后提出了增加SAW滤波器和将同步码由3ms的低电平优化为能用曼彻斯特码方式编码的0xaa55两种改善BCM遥控距离的方案。对此两种方案进行实车测试,在同样的外界条件下对比两种方案的测试结果,通过分析对比测试结果可以发现软件同步头优化后的方案极大改善了BCM无法可靠唤醒的问题,而增加SAW滤波器的硬件方案和没有增加SAW滤波器时的遥控距离基本没有发生变化。因此,可以得出优化同步码的软件方案对于RKE系统的抗干扰改善具有很重要的作用。
[1] 黄未栋.车辆 RKE/PKE 系统抗干扰,安全性及智能化研究[D]上海:上海交通大学2014.
[2] 李国庆.车身控制器遥控接收灵敏度问题浅析[J]汽车电器2013(4): 50-52.
RKE does not reliably awakens the BCM problem analysisand improvement
Fang Qiu1,2, Wang Shunwei1, Zhou Peng1
(1.Mechanical and Automobile Engineering School, Xiamen University of Technology, Fujian Xiamen 361024; 2.Fujian Bus and Special Vehicle Cooperate Research Center, Fujian Xiamen 361024)
Referring to the problem that the RKE can’t reliably awake the BCM for a car, we have conducted extensive tests to its fault under the simulated real-vehicle installation environment. We summarized the main reasons for the inreliably to wake up from two aspects, which is theoretical analysis and practical tests. And we proposed a software programme and a hardware programme to solve this problem. In the end, the real vehicle test proveded that the optimized synchronization code can solve this problem.This article focuses on the entire process from troubleshooting to solving problems.
RKE; Anti-jamming; Synchronization code
B
1671-7988(2018)16-47-04
U467.3
B
1671-7988(2018)16-47-04
CLC NO.: U467.3
方遒(1967-)男,福建漳州人,教授,高级工程师,硕士,研究方向:汽车电子技术研究及产品开发。
王顺伟,男,湖北襄阳人,硕士研究生,研究方向:汽车电子控制技术。
10.16638/j.cnki.1671-7988.2018.16.017
猜你喜欢
客联(2022年4期)2022-07-06
成都信息工程大学学报(2022年2期)2022-06-14
小学生优秀作文(低年级)(2021年11期)2021-12-06
新教育时代·学生版(2020年10期)2020-07-31
福建基础教育研究(2020年1期)2020-05-28
语文世界(小学版)(2019年2期)2019-02-24
中兴通讯技术(2017年1期)2017-03-11
智能计算机与应用(2016年1期)2016-03-02
小天使·一年级语数英综合(2014年7期)2014-06-26
环球时报(2012-03-28)2012-03-28
