
基于MSP430和ZigBee的跟日运动控制系统设计
2018-09-05 12:44:54梁雪辉吴正旺
微特电机 2018年8期
许 芬, 梁雪辉,吴正旺
(北方工业大学,北京 100144)
0 引 言
太阳能是一种清洁、丰富的能源。近年来随着空气污染的加重,人们对传统化石能源的环境危害性有了更加切身的体会和更高程度的认识。这种观念上的改变使市场对清洁能源的需求不断增长。过去十年里,在政策引导下,中国民间对于光伏发电、光热发电、风光热互补发电等新能源发电站的建设呈现出蓬勃的热情。我国目前是全球光伏发电装机容量最大的国家。根据国家能源局的统计数据,截至2015年,我国光伏总装机容量已达到43.18 GW,其中光伏电站装机 37.12 GW,分布式电站装机 6.06 GW,年发电 392×108kW·h,占全国发电量的 0.7%。近年来,随着政府补贴的压力增大,提高光伏效率、降低光伏度电成本正在成为行业共识,跟踪式光伏发电开始在国内兴起。与光伏发电不同,太阳能热发电则是采用跟日反光装置(定日镜)把太阳光聚集到吸热器上然后进行发电。“十二五”期间在国家863项目支持下,由中科院电工所牵头建设的我国第一个兆瓦级太阳能光热示范电站于2012年8月在延庆八达岭成功发电。2013年9月,中控公司在青海德令哈建设的10 MW太阳能热发电站并网发电。2015年,国家能源局提出了到2020年底实现太阳能热发电总装机容量达到10 GW,太阳能热利用集热面积保有量达到8×108m2的目标,太阳能热发电开始进入发展热潮。不管是光伏发电、光热发电,或者其他太阳能热利用项目,光利用效率决定了太阳能发电系统的能效,进而决定了太阳能发电系统的单位成本。采用双轴跟踪方式的反光镜可以保证采光面一直接收直射的太阳光,从而提高入射的太阳能量密度,提高系统光热利用效率。
双轴跟日运动控制方式主要有方位-俯仰运动方式和自旋-仰角运动方式[1]。方位-俯仰运动方式利用垂直地面的立轴和水平方向的俯仰轴运动改变镜架的方位角和俯仰角,实现对太阳的跟踪。自旋-仰角方式通过镜面的自旋和镜架的仰角变化改变定日镜的法线方向实现对太阳的跟踪。自旋-仰角方式具有弧矢方向和子午方向成像距离始终保持一致的优点,但由于此种运动方式实现起来相对复杂,目前应用并不多。
跟日方式有基于光电传感器的光控法和基于视日运动轨迹的时控法。时控法是根据天文公式计算出太阳每个时刻在地平坐标系下的精确位置然后调整跟日机械装置的姿态使之追随太阳运动。光控法则是利用光电传感器(光伏电池板,光敏电阻,光电二极管等)检测太阳的相对位置然后调整机械装置跟踪太阳。相比于时控法,光控法容易受到天气、浮云、飞鸟等外界干扰,而且成本相对较高,所以在实际应用中一直受到限制。
郭铁铮等研制了基于TMS320F2810的定日镜跟踪控制系统[2]。定日镜运动系统由2台异步交流伺服电机和减速机组成。控制系统采用开-闭环相结合的模式对定日镜的运动系统进行控制,即开环控制系统计算出定日镜高度角和方位角位置,然后根据传感器对定日镜姿态进行闭环调节。该跟踪控制系统跟踪精度可以达到3.5×10-3rad,但是整个运动控制系统结构比较复杂,成本比较高。北京延庆太阳能热发电实验电站采用主从PLC的方式进行定日镜跟踪控制。主PLC根据时间和天文公式计算出当前时刻各个位置定日镜要达到的方位角和高度角,并通过现场总线下发到从PLC,然后通过变频器和交流伺服电机实现定日镜的运动控制[3]。刘琨等介绍了一种基于TMS320F2801处理器和光伏电池板的自主供电式小型定日镜系统设计[4]。西班牙亚塞尔维亚大学与Solucar公司合作研制的MEMS太阳跟踪器采用太阳光传感器和Bang Bang控制对定日镜进行闭环控制。当有直射太阳光时,如果误差信号幅值大于一个设定阈值,就起动电机转动;如果误差信号小于阈值,电机就停转;当太阳被遮挡时,系统则进入开环模式[5]。
1 太阳位置计算
日地之间的位置参数可以通过数值模拟法或理论展开式法来计算,其中理论展开式法精度更高[9]。本系统采用理论展开式法计算太阳的赤纬角,然后根据太阳赤纬角、跟日系统所在纬度及跟踪时间求出太阳的方位角和高度角。
太阳赤纬角是地球赤道所在平面与太阳地球中心连线之间的夹角。由于日地相对位置变化,赤纬角每年在+23°27′ 与-23°27′ 的范围内变化。每年夏至赤纬角达到最大值+23°27′ ,该日中午太阳位于地球北回归线正上空,随后赤纬角逐渐减小,至秋分日赤纬角变为0,到了冬至12月21日赤纬角达到最小值-23°27′ 。赤纬角的计算公式如下:
(1)
以地球上一点建立地平坐标系,在此坐标系下,太阳的高度角和方位角可以根据天球赤道坐标系的太阳赤纬角δ和时间角ω来计算:
(2)
式中:hs是太阳的高度角;βs是太阳的方位角;δ是赤纬角;φ是纬度;ω是时间角。
以定日镜顶点为原点,以天顶为Z轴,建立地平坐标系OXYZ。假设靶标相对于定日镜中心点的方位角是βt, 高度角是ht,θ是太阳入射角,根据反射定律及夹角余弦公式,可以推导得到定日镜的法线方位角βn和高度角hn的计算公式[6]。
(3)
2 跟日系统设计
双轴跟日系统包括水平方向转动轴和俯仰方向转动轴,两转动轴分别采用步进电动机加齿轮传动来带动。定日镜的框架采用方钢制成,尺寸为1.5 m×1.5 m,整个架子质量约为30 kg。
为了减小系统成本,控制部分采用单片机MSP430F5438A作为控制器,通过两相全数字式细分驱动器驱动2台步进电动机实现定日镜的方位角和俯仰角调整。根据仿真计算,水平方向的运动范围小于150°,俯仰方向的运动范围小于50°。图1是自动跟日镜架的三维机械模型图。

图1 跟日反射系统CAD模型
2.1 控制系统总体方案
为了兼顾可靠性和自动性,双轴跟日控制系统采用独立自动控制加网络监控的方案。控制节点内置自动跟日程序,可以按照程序设定每日自动跟踪太阳运动。该节点同时具有ZigBee通信模块,可以通过无线传感网络和远程的云服务器相联。应用工程师或普通用户可以通过远程智能终端(比如智能手机)对控制节点进行访问,完成参数设置,或者进行时间修正、姿态校准、系统复位等操作。整个控制系统由3部分构成,分别是跟日控制节点、支持ZigBee的互联网网关和云服务器上的网络服务程序,系统架构如图2所示。
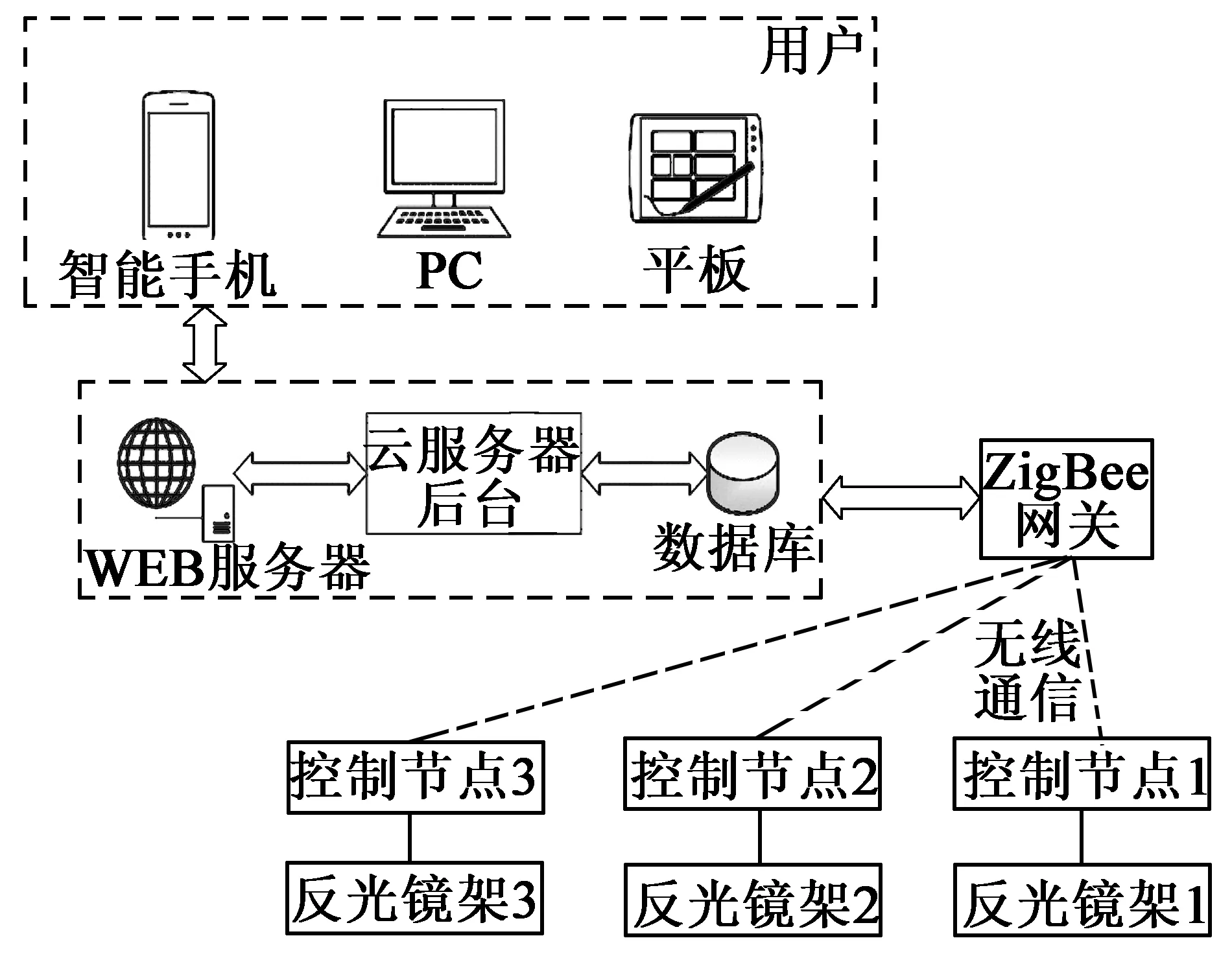
图2 控制系统总体设计
2.2 步进电动机选型
从方便控制和降低成本的角度出发,系统选用了两相混合式步进电动机。跟日运动系统的水平运动方向阻尼较大,需要较高的输出力矩。86步进电动机的输出保持力矩为根据力矩估算,选用86步进电动机加100倍比的齿轮传动系统来带动。俯仰方向的阻尼和力臂较小,采用57电机加一个50倍比的齿轮传动系统进行运动。2台步进电动机均可以采用微步距方式进行控制,其中最小细分步数可以达到51 200步,对应的角度为0.007°。
2.3 控制节点设计
具有ZigBee通信能力的控制节点完成对跟日反光镜架的跟踪控制任务。控制节点采用型号为MSP430F5438A的处理器,包括单片机最小系统,ZigBee无线通信模块,步进电动机接口电路,限位开关接口电路,供电电路等,如图3所示。

图3 控制节点设计
2.3.1 单片机系统
主处理器是16位单片机MSP430F5438A。 MSP430F5438的系统主时钟为25 MHz。片内包含256 kB FLASH,16 kB SRAM,还带有4个串口,4个SPI,4个定时器,一个12位A/D转换器,一个RTC实时时钟,及多达87个I/O口。MSP430的供电电压是3.3 V。为了方便程序BLS烧写,主控板扩展了一个USB接口,通过USB芯片CH340T,实现从USB输入到串口的转换。
2.3.2 电机驱动电路
跟日系统的2个轴都用步进电动机带动。选用的驱动器为带有细分功能的两相混合式步进电动机数字驱动器,微步细分最大可以达到51 200步/转。单片机向驱动器输出一定频率的脉冲,由驱动器来控制电机的使能、转动方向和控制脉冲。电机驱动器采取共阳接线法,用74HT04D芯片进行电平转换。
2.3.3 霍尔开关接口电路
选用欧姆龙的霍尔开关TL-Q5MC1-Z 作为2个运动轴的限位开关。当2个运动轴达到限定位置时,霍尔开关输出变为低电平,根据霍尔开关的输出信号,单片机停止电机运行,并把转动轴的当前位置作为初始角度位置。霍尔开关的供电电压和输出信号都是12 V,需要把12 V转换为5 V以便与单片机接口。接口板采用了LM317稳压芯片搭配片外电阻来实现电压转换。
2.3.4 供电电路
本文的运动控制系统涉及2台步进电动机的控制,采用的驱动器供电电压范围为DC 24~40 V,最大工作电流为6 A。由于不需要进行轨迹控制,所以2个运动轴一般不同时运动。另外用于限位的霍尔开关采用12 V直流供电,单片机5 V供电。系统选用24 V,350 W开关电源给电机驱动器供电,开关电源输出的电压通过一个12 V的稳压管和一个5 V的稳压管再输出12 V电压和5 V电压,分别给霍尔开关和单片机电路供电。
3 软件设计
整个跟日运动控制系统软件包括3个部分:嵌入式控制器节点程序,ZigBee网关程序,云服务器上的WEB服务器程序及网页界面设计。系统的软件框架如图4所示。
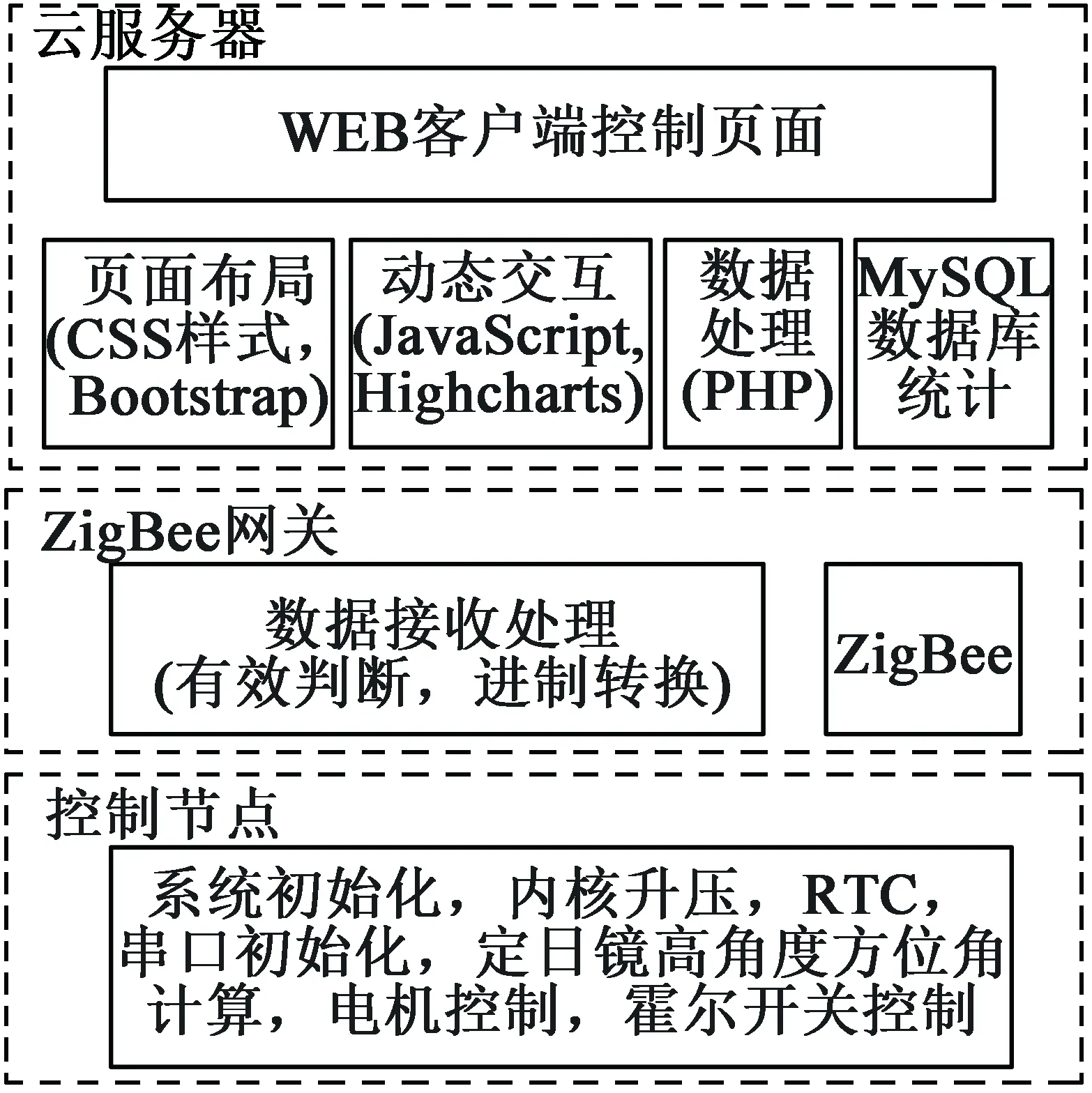
图4 系统软件框图
控制器采用MSP430F5438A作为处理器,并嵌有ZigBee通信模块,可以看成是ZigBee网络的一个控制节点。控制节点程序的主要功能包括单片机的初始化、事件管理、太阳跟踪算法、时间管理、跟日系统校准、步进电动机控制、数据通信等。ZigBee网关程序主要包括ZigBee网络与云服务器之间的数据传递、数据转换、数据处理、ZigBee节点之间通信等。云服务器上的软件则包括Web服务器、数据库、数据库应用管理程序和动态网页界面程序。
3.1 控制节点程序
控制节点的软件包括单片机资源管理、时间管理、跟日位置计算、跟日系统校准、霍尔开关状态检测、步进电动机控制等模块。
控制节点主程序流程图,如图5所示。
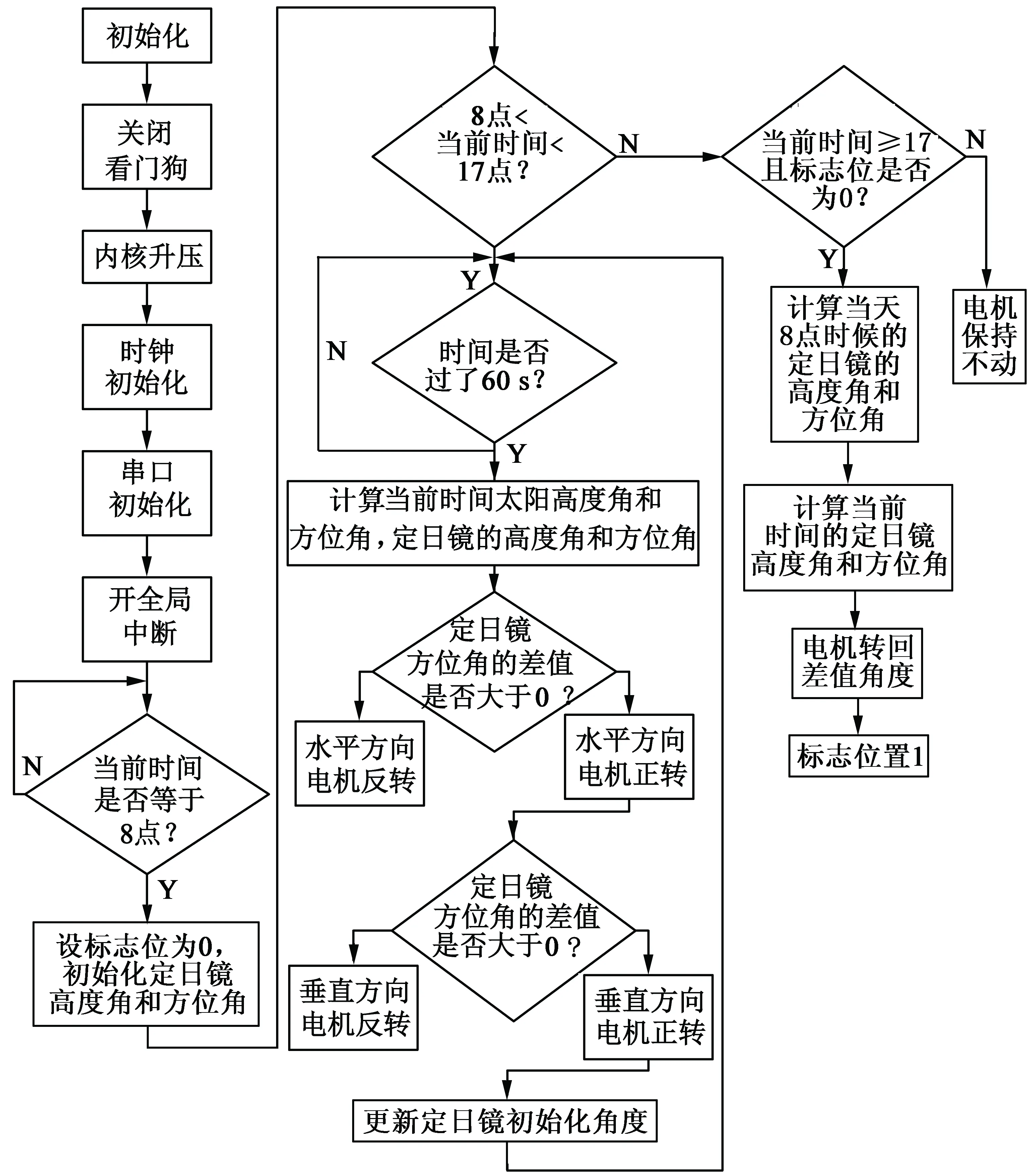
图5 控制节点主程序流程图
单片机上电之后,通过中断程序对系统的实时时钟和跟日反射装置的经纬度进行设置。在WEB客户端上通过互联网获取当前时间,同时读入当前跟日反射装置的经纬度,目标靶位的高度角和方位角等[7]。用户输入数据按照一定格式保存到数据库的表格里。ZigBee网关从数据库中获取数据并判断数据是否有效,如果有效则把数据转为16进制发送给控制节点,然后控制节点根据这些参数进行计算,利用式(2)计算出当前时间太阳的高度角和方位角[7],并根据式(3)计算出跟日反射装置的目标姿态角,通过PWM输出控制步进电动机转动,使反光镜姿态达到目标角度,把太阳光线反射到指定的靶标位置。考虑到太阳的移动比较慢,跟日运动系统的控制周期设置为60 s,即每隔60 s调整一次定日镜的姿态角度。跟日系统的默认工作模式是早上8点自动进入跟踪模式,下午5点结束跟踪回到初始零位。回到初始零位后,控制节点进入低功耗工作模式,即睡眠状态。由于系统具有ZigBee无线通信功能,而且与云服务器相联,跟日系统也可以根据本地天气情况对工作模式及工作时间进行智能控制,比如当天气预报有雨时,系统不进行跟踪,或有大风预警时,则自动停止跟踪回到零位状态。此外,在自动跟踪过程中如果反光镜的跟日误差增大,可以调用校准程序对跟日系统的姿态角进行修正,减小跟踪误差。
3.2 网络控制程序
除了自动跟踪模式外,系统也允许用户通过WEB进行网络控制。网络控制程序通过串口中断来实现。当控制节点的串口接收到数据后自动进入中断,然后根据接收到的数据对电机进行控制,从而达到网络控制定日镜角度的目的。中断响应程序流程如图6所示。

图6 中断响应程序流程图
控制节点的串口通信波特率设为2 400 bit/s,每10 ms发送1 Byte,共22 Byte[7]。数据发送格式如表1所示。

表1 串口数据发送格式[7]
3.3 ZigBee通信
无线通信采用CC2530+ZigBee协议栈实现。ZigBee通信协议目前已成为无线传感网络应用中的事实标准。ZigBee室外通信距离可以达到1 km以上。控制节点和ZigBee网关节点,通过ZigBee进行通信。ZigBee网关节点与云服务器之间采用TCP/IP协议进行数据传输。云服务器上安装了MySQL数据库以及相应的数据库管理程序,并向节点开放远程访问接口。ZigBee网关节点连接远程数据库,将WEB客户端的输入数据从数据库中提取出来,进行转换,再利用Python中的PySerial模块将数据通过串口转ZigBee模块发送给跟日控制节点,完成WEB客户端对定日镜的远程控制。
4 实验和运行
为了实现远程控制,我们在腾讯云上申请了服务器账号,包含1 GB的内存和8 GB的硬盘,1 Mbps的互联网带宽。在服务器上搭建了相应的程序。服务器端安装了Python, MySQL,PHP,Apache,Ubuntu Server 等程序。
ZigBee网关节点采用Python语言开发,用到MySQL的db,serial,time和binascii 4个模块,这4个模块的功能是数据库查询,串口通信,延时和二进制及ASCII码转换。
步进电动机细分6 400步/圈,0.056 3度/步,脉冲输出频率可以根据控制要求进行设置。自动跟踪时的脉冲输出频率为66 kHz,在复位和校准时,脉冲输出频率提高到500 kHz。由于采用时控法,时间精度对太阳位置计算影响很大。采用网络控制,每次输入的时间都来自经过校准的互联网时间,时间精度得到保证。
控制节点及跟日反光镜如图7所示。
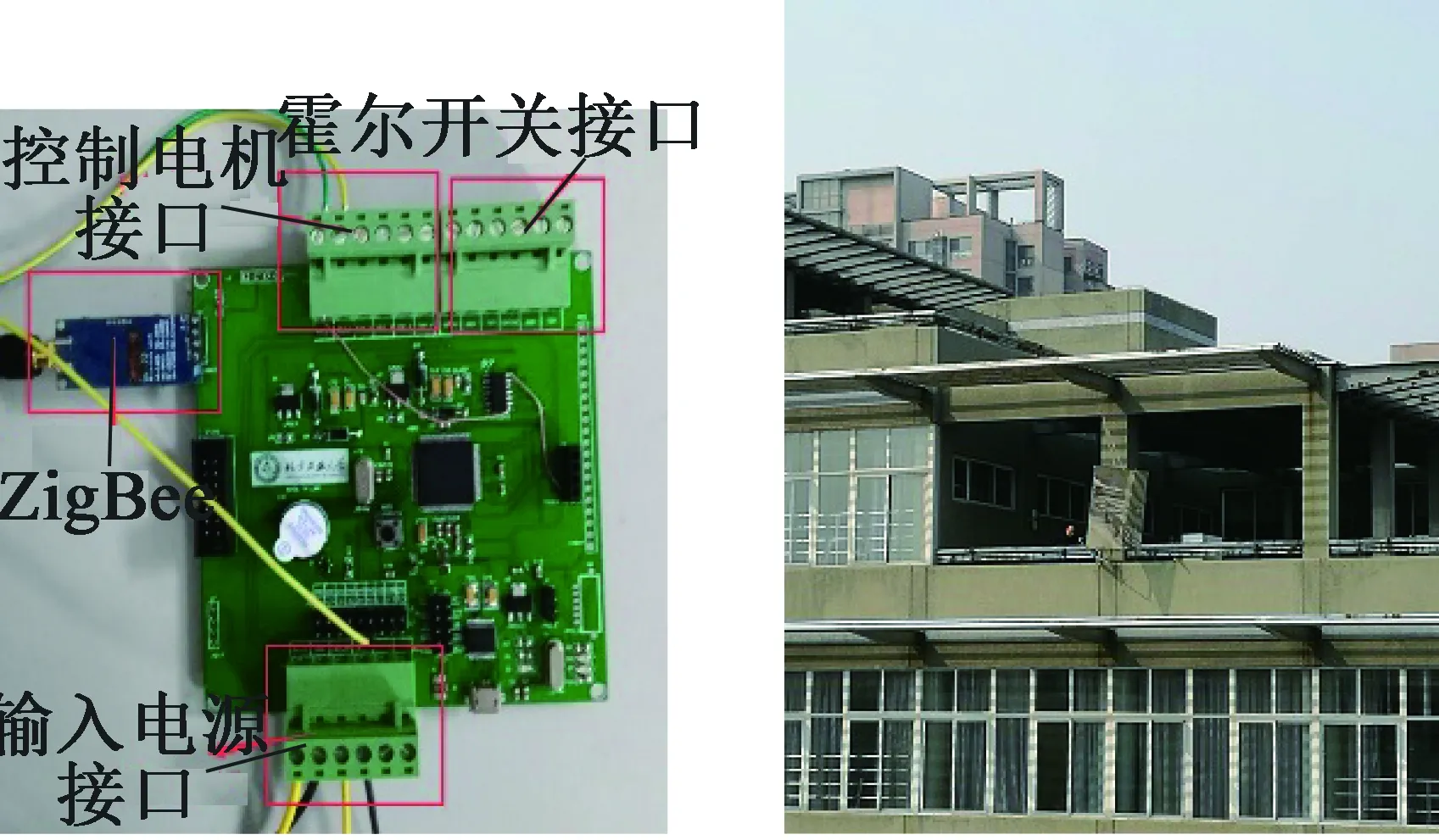
(a) 控制节点 (b) 跟日镜图7 控制节点和跟日镜
跟日装置安装在校园内一个教学楼的五层阳台上,自动跟踪系统把太阳光反射到对面一座教学楼的一个北向房间的窗户上,如图8所示,以改善居室内的采光和温度状况。
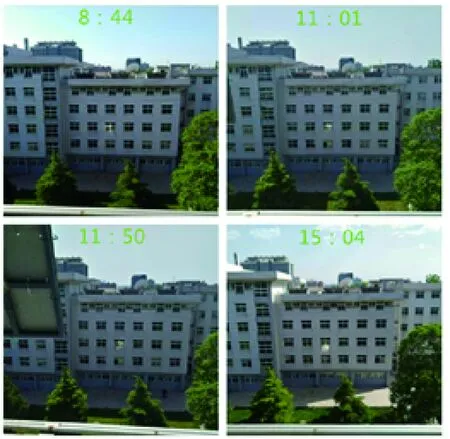
图8 定日镜跟日反射光斑
在实际应用中,也可以根据天气状况对定日镜进行自动起停和保护控制。在网络管理应用程序中通过调用天气网站对外开放的API接口,可以获得更多天文与环境信息,比如温度、湿度、风力、风速、空气质量(CO,CO2,PM10和PM2.5)等情况,然后在应用程序中设定跟日系统,可以自动跟踪天气条件,如果天气达不到要求条件时,反光镜回到原位并停止跟踪。
5 结 语
随着绿色、可持续发展理念的推广,可再生能源的应用正在变得越来越广泛。太阳能作为自然界赋予人类的一种丰富的绿色能源,已经在太阳能发电、海水淡化、建筑取暖、交通动力、照明、炉灶等多个领域取得应用。智能反光装置根据太阳位置自动调整姿态并把太阳光反射进入背阳的阴面房间,达到改善居室采光及提高温度的目的。当用户不需要太阳光照明时,可以通过手机登陆云服务器关闭系统,或者让跟日系统把太阳光反射到其他位置,符合节能和绿色发展的理念。本文基于单片机和步进电动机的跟日运动控制系统,结合了ZigBee和网络远程控制技术,具有成本低、应用方便的优点,可以应用于分布式光伏发电、太阳能热发电、太阳能照明、太阳能炉灶等领域,具有较好的推广应用价值。
猜你喜欢
科学大众(2022年23期)2023-01-30 07:03:44
防爆电机(2021年4期)2021-07-28 07:42:56
上海大中型电机(2021年2期)2021-07-21 03:01:32
沈阳工程学院学报(自然科学版)(2020年3期)2020-08-27 10:36:40
小哥白尼(趣味科学)(2018年4期)2018-06-21 06:23:30
沈阳工程学院学报(自然科学版)(2017年3期)2017-08-07 09:29:14
能源研究与信息(2016年4期)2017-03-31 04:17:45
发明与创新(2016年6期)2016-08-21 13:49:36
沈阳工程学院学报(自然科学版)(2016年4期)2016-02-06 11:59:58
智能建筑电气技术(2015年5期)2015-12-10 05:52:25
