
基于带修正因子的主动悬架模糊控制与仿真*
2018-09-05 06:43秦玉英李志勇陈双
汽车工程师 2018年7期
秦玉英 李志勇,2 陈双
(1.辽宁工业大学;2.河南省高远公路养护技术有限公司)

悬架是将车轮和车身进行弹性连接的一个总成,是隔离路面传递给车身振动的主要装置[1-2]。装有主动悬架的汽车通过作动器输出控制力对汽车进行实时调整,保证汽车的车身姿态达到较为理想的状态。主动悬架系统的关键在于控制算法的运用,与最优控制、预见控制及自适应控制等[3-6]相比较,模糊控制不依赖于精准的数学模型,易于实现。但是传统的模糊控制算法一旦控制规则制定并存入内存之后其控制策略不能随着汽车不同的行驶路况进行改变。文章针对传统的模糊控制算法的缺点提出带修正因子的模糊控制算法,该种控制算法能够根据不同的行驶路况使汽车的行驶状态实时在线调整控制参数,实现实时最优[7]。
1 含主动悬架的汽车4自由度振动结构模型
汽车是一个非常复杂的振动系统,为了便于分析问题,需要对其进行简化,建立数学模型。把汽车车身看做一个刚体模型,车身只有上下的垂直振动和前后的俯仰振动。将汽车悬架简化为弹性元件、阻尼器及作动器。车轮简化为刚体和弹性元件,如图1所示。
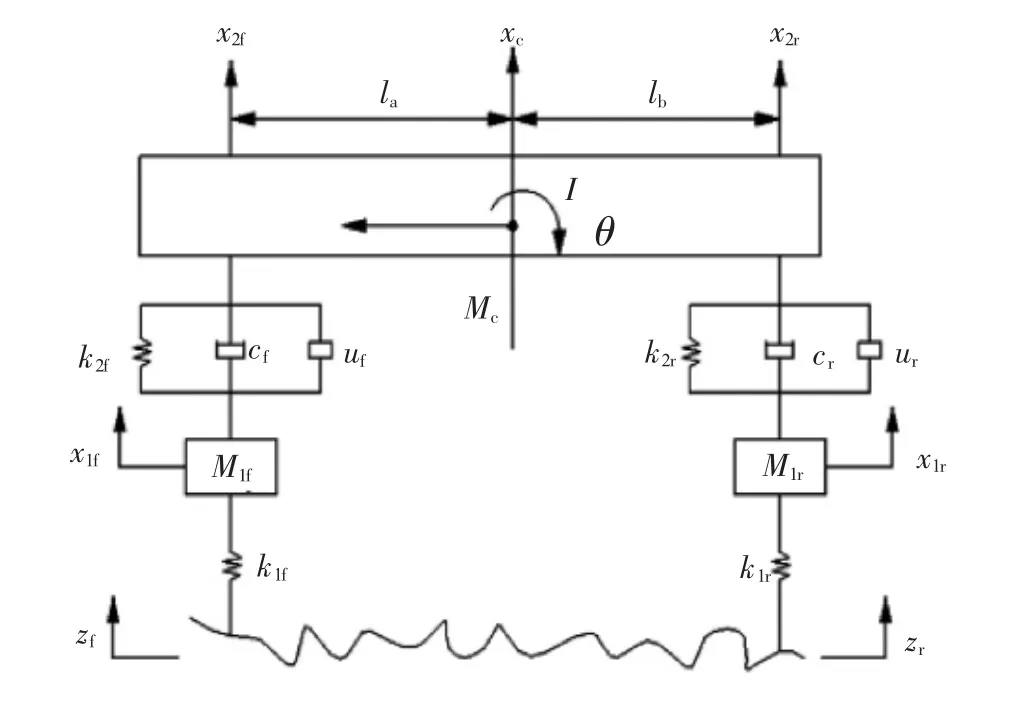
图1 含主动悬架的汽车4自由度振动结构模型
根据牛顿定律建立针对含主动悬架的汽车4自由度振动结构模型运动微分方程,如式(1)~(5)所示。

为了能更加真实地反映实际路面的情况,保证时域路面不平度与真实路面谱尽量一致,在路面谱中引入下截止频率(f0,取0.01),路面激励为积分白噪声:
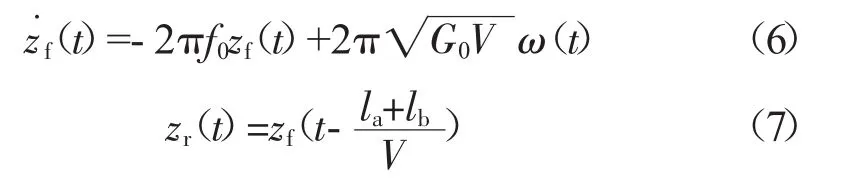
式中:G0——路面等级系数,文章采用B级路面进行仿真,因此路面等级系数G0=64×10-6m3/cycle;
V——车速,30 m/s;
t——仿真时间,s;
ω(t)——均值为0和强度为1的均匀分布白噪声。选用状态空间模型对悬架系统进行建模,状态变量的选择如下:

含主动悬架的汽车4自由度振动结构模型状态空间描述,如式(8)所示。
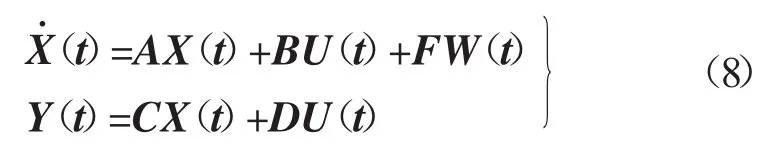
式中:A——系统矩阵;
B——控制输入矩阵;
C——输出矩阵;
D——前馈矩阵;
U(t)——控制力矩阵;
X(t)——输入变量矩阵;
Y(t)——输出变量矩阵;
W(t)——白噪声矩阵;
F——扰动输入矩阵。
为了便于在MATLAB Simulink中进行仿真,对以上状态空间表述做如下改动:


式中:wf,wr——前后轮白噪声输入。
选取状态方程的输出变量,如式(12)所示;得到主动悬架的输出方程,如式(13)所示。

2 带修正因子的模糊控制器设计
设计带修正因子的模糊控制器,需要引入修正因子,也称为修正系数。改进后的模糊控制器其控制规则不单独由模糊控制规则表确定,而是由式(14)根据具体误差情况确定:

式中:E——车身与悬架连接点处的垂直振动速度与理想参考输入之间的差值;
EC——差值变化率;
α——修正因子。
带修正因子的模糊控制器的设计包含两部分内容:1)基本模糊控制器的设计(二维);2)添加修正因子的模糊控制器(一维),前后悬架采用同样的控制器。
2.1 基本模糊控制器的设计
模糊控制器是在离散的有限论域上进行设计的,所以必须对精确量、连续量进行模糊化和离散化。根据初步试验结果,E的变化范围为 [-0.09,0.09],EC的变化范围为[-0.9,0.9],根据经验数值输出U的范围应为[-190,190]。E,EC,U 的模糊化论域均为[-3,-2,-1,0,1,2,3]。
将模糊子集划分为7个并用英文字母表示。即E,EC,U 的模糊子集均为:{负大(NB),负中(NM),负小(NS),零(Z),正小(PS),正中(PM),正大(PB)}。
模糊变量的隶属函数是将0~1范围内的数分配给每一个模糊子集,为了计算结果的准确性,隶属度函数采用高斯型函数。
当控制力为正值时,其控制作用是增大实际值;控制力为负值时,其控制作用是降低实际值。模糊控制规则的制定原则,当误差偏离与控制目标值偏离较大时,控制系统给出的控制力要能够快速降低误差;当误差偏离与控制目标值偏离较小时,控制系统给出的控制力要以防止超调为主。根据上述模糊控制规则的制定原则制定出模糊控制规则表并存入内存。
模糊控制规则制定后,模糊控制器需要经过模糊推理才能够得出输出变量的模糊子集。模糊推理方法采用Mamdani法,模糊判决方法采用中心法,经过模糊判决的结果仍然是一个模糊量,但是作动器需要一个精确量,判决值需要乘以比例因子,即:控制系统输出量的精确值。
2.2 添加修正因子
添加α采用一维控制器的方法,设计方法与基本模糊控制器的设计类似,但控制规则有所改变。E的基本论域与基本模糊控制器一致,α的基本论域为 [0 1],模糊子集为4个,即:零(O)、小(S)、中(M)、大(B)。隶属度函数采用正态分布的隶属函数,模糊控制规则表的制定采用文章所述的原则。
根据已建立的数学模型和设计好的控制器在MATLAB Simulink中进行模型的搭建,搭建好的仿真模型,如图2所示。图2a示出总的控制系统框图,在悬架模型中封装了被动悬架和主动悬架2个模型,仿真对比结果可以直接在示波器中显示。前后悬架采用同样的控制器,控制器模型,如图2b所示。

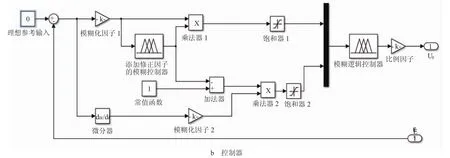
图2 主动悬架Simulink仿真模型图
主动悬架Simulink仿真模型中,控制器的输入为E和EC,控制器的输出为U。
3 仿真结果分析
利用在MATLAB Simulink模块中已建立的模型进行仿真对比,主要对比车身垂直加速度、悬架动行程及轮胎动变形。图3示出高斯白噪声路面激励下的车身垂直加速度相应量对比曲线。

图3 高斯白噪声路面激励下的车身垂直加速度对比
从图3可以看出,相比于被动悬架,带修正因子的模糊控制主动悬架的车身垂直加速度平均值有了明显的减小,车身振动趋于平稳。
除车身垂直加速度外还有2个重要的评价指标,悬架动挠度和轮胎相对动载荷,图4和图5分别示出前后悬架的动行程对比及轮胎相对动载荷的对比。悬架动行程也即悬架系统工作空间,轮胎相对动载荷是轮胎动载荷和静载荷的比值,反映的是轮胎的附着性能。
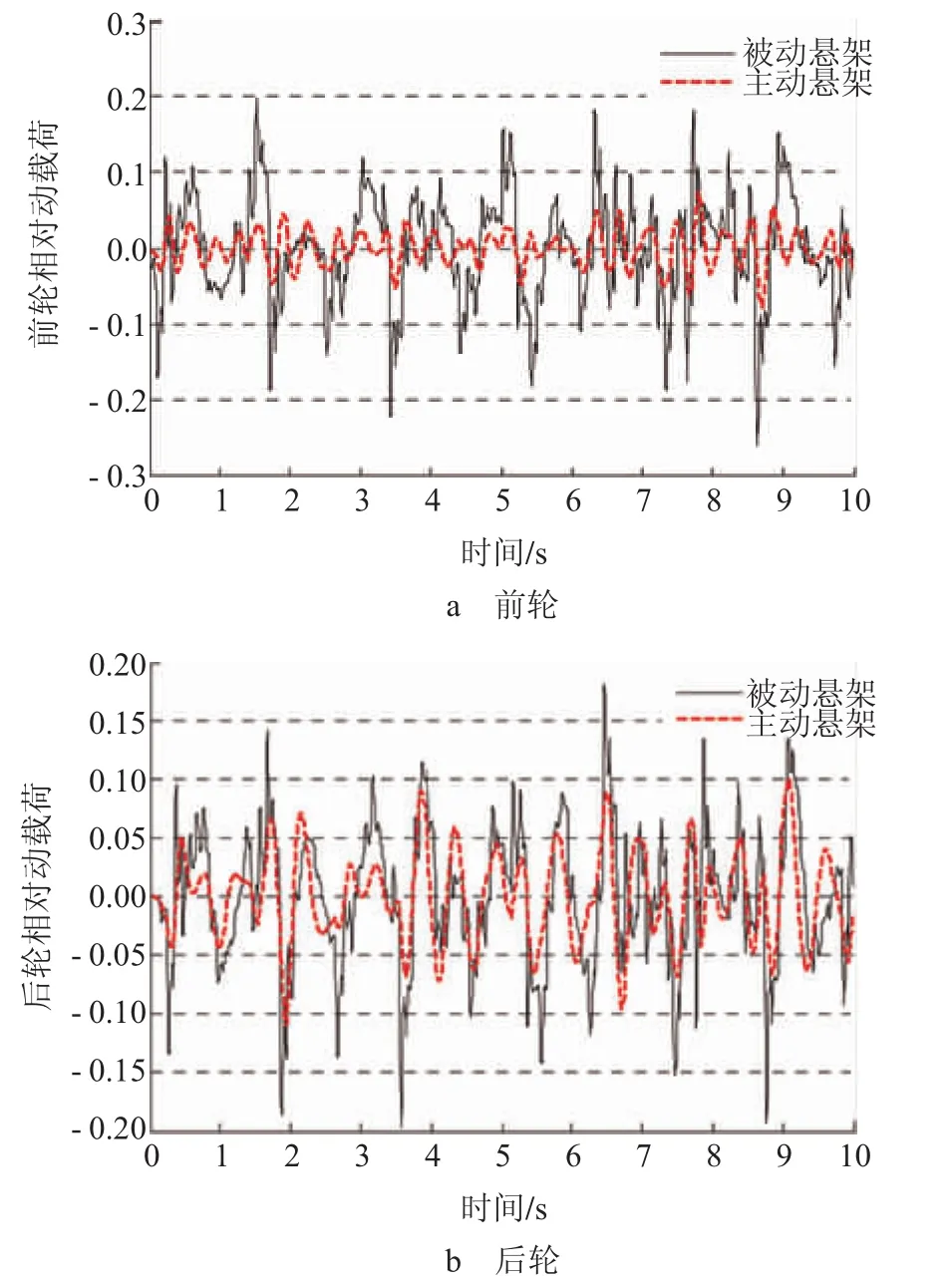
图5 轮胎相对动载荷对比
从图4中可以看出,采用带修正因子的模糊控制器控制之后,悬架动行程平均变化值明显减小,有效改善了在某些时间点突变的情况,变化趋向于平稳,有效降低了冲击限位块的概率。从图5中可以看出,无论是前轮还是后轮,轮胎相对动载荷经过控制之后平均值变化显著,减小幅度很大,并且变化更平稳。在轮胎刚度不变的情况下,轮胎动载荷会相应的减小,由此,汽车的驾驶安全性和操纵稳定性得到了改善和提高。
4 结论
文章基于汽车4自由度结构模型设计了改进型的模糊控制器,即:带修正因子的模糊控制器,前后悬架采用同样的控制器,2个控制器的输入分别是前后悬架与车身连接点处的速度与理想参考输入之间的差值,以及差值的变化率。改进型的模糊控制器引入了修正因子,保证控制作用的实时最优。路面激励采用白噪声信号,更加接近真实路面。以图形的形式对比了悬架系统的3个悬架评价参数。仿真结果显示:采用带修正因子的模糊控制可以提高汽车的行驶平顺性,抑制车身的垂向振动,该种控制算法可以为汽车主动悬架的研究提供一种依据。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年3期)2022-02-23
快乐语文(2021年35期)2022-01-18
时代汽车(2021年1期)2021-03-03
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
神州·中旬刊(2017年1期)2017-06-28
旅游纵览(2015年8期)2015-09-25
现代电子技术(2009年13期)2009-08-31
