
传感器在汽车领域的应用研究
2018-09-04 09:37
汽车文摘 2018年9期
随着汽车朝着智能化的方向进行发展,车载传感器越来越多样化,传感器使用提高了汽车的安全性、动力性、舒适性等性能。本文将对传感器在汽车领域的应用进行探究。
1 使用车载传感器和GPS进行车辆状态估计的综合观测器法[1]
1.1 研究目的和研究方法
本研究提出了一种估计车辆侧滑角的新方法,该方法是一些车辆底盘控制系统的关键技术。利用现有的车载传感器和独立的全球定位系统(GPS),开发了一种集成的观测器方法,包括基于各自自行车模型和运动学模型传感器偏移补偿器和两种扩展卡尔曼滤波器(EKF)。集成观测器方法的流程图如文中Fig.1.所示。为了正确地组合这些扩展卡尔曼滤波器的输出,设计了加权因子,轮胎转弯刚度和轮胎力的函数。通过非线性系统的可观测性函数来检查每个扩展卡尔曼滤波器模型的可观测性。同时,通过提出的算法,对纵向速度、航向角和轮胎转向刚度进行了估算。将全球定位系统(GPS)与车载传感器的数据相结合。一些研究人员指出,这种组合是足够准确和可靠的,在准确性、带宽和噪音水平方面具有互补的特性。此外,扩展卡尔曼滤波(EKF)是一种有效的估计非线性系统状态的方法,适用于自行车模型和运动模型。三个子系统(传感器偏移补偿器和两个基于车辆模型的EKF)使用价格具有竞争力的传感器融合(车载传感器和GPS)单独实现。通过真实的基于汽车的实验,已经确认了在各种驾驶情况下的高性能估计。并通过比较研究确定了综合观测器的优越性。
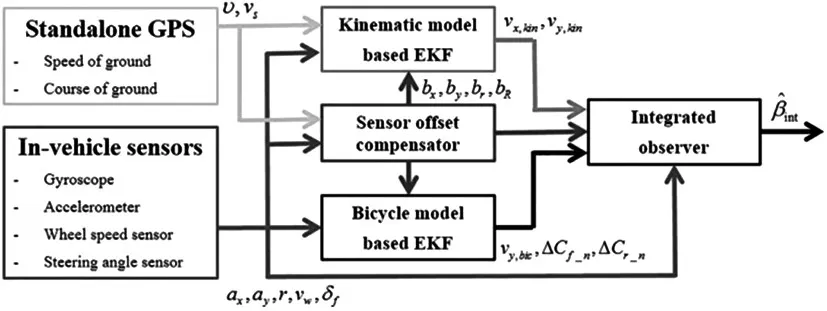
Fig.1. 集成观测器流程图[1]
1.2 研究结论
该集成观测器算法的主要研究结论概括如下:
(1)传感器偏移补偿器结构简单直观,但可以轻松消除传感器固有偏移,提高整个估算算法的准确性。
(2)具有轮胎转弯刚度估计的基于自行车模型的EKF在轮胎线性区域中提供了优异的估计性能并对轮胎非线性区域进行检测。相比之下,解决了GPS测量上非线性问题,特别是基于运动模型的EKF有效地用于轮胎非线性区域。
(3)最终的综合观测器具有一些优势,例如由于EKF的预测步骤而具有更高的估计精度以及高频噪声的抑制而没有任何相位滞后问题。
(4)只使用最少数量的传感器的建议观测算法是一种具有高性价比方法。
(5)该算法可能会成为量产车辆状态估计的实用解决方案。此外,期盼由算法提供的有意义的信息可能会成为改进车辆控制系统性能具有光明前景的工具。
2 利用气体传感器探究汽车特性对其气体排放影响的初步结果[2]
2.1 研究目的和研究方法
使用便携式监测传感器,对停放在不同地方的车辆进行测量。测量排放物包括氮氧化物(NOx),一氧化碳(CO),二氧化碳(CO2)和挥发性有机化合物(VOC)。在本项研究中,已经尝试将汽车排放的气体与一些汽车特性相关联,例如功率(从68到143 HP不等),行驶的公里数和车龄(2到19年之间)。检测排放值变化显著,CO2检测值变化范围是490至3350 ppm,CO检测值变化范围是0.1至40.3 ppm,有机化合物VOC变化范围为0.13至32.25 mg/m3。以NO2排放的为例,最高测量水平为4.66 mg/m3。此外,在启动和关闭发动机之前,人体呼吸的测量被用于评估车辆排放对人类健康的影响。发现暴露水平确实是排气影响到操作人员肺的呼吸质量。
为了评估汽车特性对空气质量的影响,本研究检测了11辆柴油车和5辆汽油车中CO2,CO,NO2和VOCs的气体排放量。废气的浓度和检测的每辆汽车的功率、年龄和公里数等参数有关。本研究根据发动机中使用的燃料类型,分别研究汽车特性对柴油车和汽油车尾气排放的影响。
2.1.1 柴油车
表1显示了柴油车的排放测量值和发动机动力特性、车龄和行驶公里数的关系。对于测量的每个参数,包括在传感器操作期间获得的最小值,最大值和平均值,而且可看到排放值作为每辆车特性函数而变化。
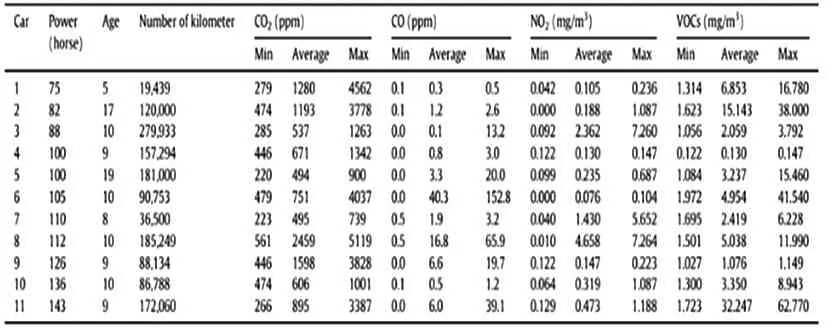
表1 柴油车排放特性[2]
2.1.2 汽油车
表2列出了不同汽车特性下的汽油车排放数据。对于测量的每个参数,在已建立的操作时间内记录了最小值、最大值和平均值。总的来说,对于所有污染物而言,气体的浓度与一种交通工具的浓度差别很大,与汽车的不同特性相关较小。
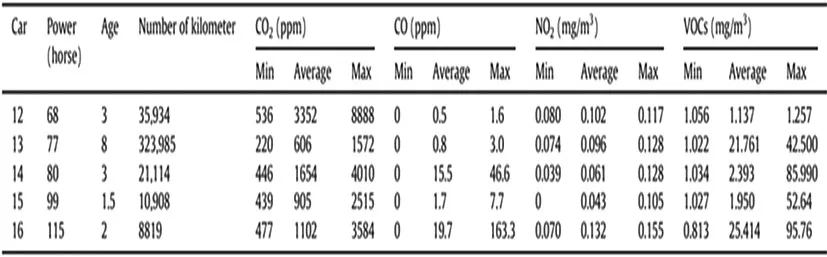
表2 汽油车排放特性[2]
2.2 结论
研究结果表明,汽车的气体排放与汽车的特性有关。汽车尾气排放的成分随着功率、车龄和行驶公里数的变化而变化。然而,汽油和柴油车之间的排放量没有太大差异。另一方面,暴露操作者与车辆排气,通过增加测量气体吸入浓度,对比试验前后测量数据进行评估。这些数据证明,操作员的呼吸受到汽车排放的严重影响,从而给人类健康带来严重风险。
3 多传感器驾驶员辅助系统的可靠性和测试工作分析 [3]
3.1 研究目的和研究方法
自动驾驶汽车的现代驾驶员辅助系统通常依赖于不同传感器收集的数据来确定必要的系统决策。为了防止系统故障,使用不同的验证技术。开发工作通常在汽车制造商和供应商之间划分,因此测试工作就是一个主要项目验收标准。现有的工作评估方法是不适用的,因为它们依赖于在早期阶段不存在的实施细节,或者在项目经验或个别专家的期望中,这些都不够可靠,不能作为可靠的来源。因此,本研究提出了一种多传感器系统误差概率计算的分析方法。基于此,作者可以对测试工作进行估计,使得在统计可信度下,在测试期间不会出现传感器系统的错误。该方法能够将连续传感器误差之间的依赖性和不同传感器之间的相关性考虑在内,主要通过使用离散时间马尔可夫链。因此,所提供的方法允许设计多传感器系统,满足特定的总误差概率要求,并给出处于测试工作上限估算结果。
3.2 研究结论
在本研究中,作者提出了一种分析方法,用于确定基于多传感器的驾驶员辅助系统必须处理的测试工作量,以确保具有预定义系统的可靠性。该方法能够处理异构传感器设置,并考虑连续传感器读数和传感器之间的相关性。由于传感器循环时间和相关误差率用作单个数据输入,因此估算方法可以直接用于早期项目阶段(见文中Fig.9.),例如规范阶段。这就是为什么不需要或不考虑实施细节的原因。作为自上而下的方法,不考虑诸如环境问题或老化效应的物理干扰。所提出的方法提供了在真实的汽车开发项目开始时只需使用当时已知的关键事实可以估计所需的测试工作内容。然后,可以将确定的值用作与供应商或服务提供商的合作项目中的认可和验收标准。除了在真实汽车项目中的试验外,对其它细化系统方面和传感器特性的考虑也是正在进行的工作的一部分,并在后续出版物中进行描述。特别是相关传感器的理论内容涵盖到更复杂的传感器流程,而不仅仅是两个传感器。
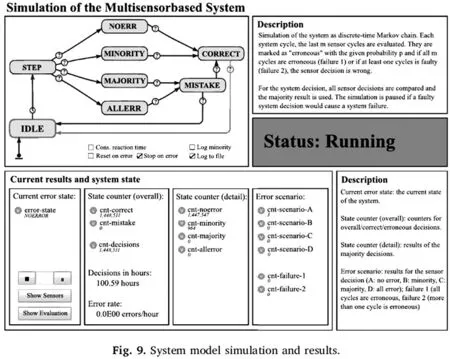
Fig.9. System model simulation and results.
4 关于连接汽车设备、系统和建模的传感器技术[4]
4.1 研究目的及方法
车辆事故是导致人身伤害、财产损失、金融重大损失和其它对公众的负面影响的全球性重大问题。在大多数情况下,车辆事故是由可避免的人为错误和不正确的驾驶习惯引起的。随着传感技术所取得最新进步,自动驾驶、联网汽车和自动驾驶车辆变得越来越实用。传感器数据也为对等车辆共享系统进行车辆到车辆(V2V)交互来减少道路事故作出贡献,以及使用传感器来维持安全驾驶距离和避免发发生事故。联网汽车中的传感器技术还通过使用车辆到基础设施(V2I)交互来改善整体驾驶体验。这使得能够从路边单元网络接收警告,起到固定航路点的作用以及警告消息的接续和可提供关键服务信息。这种信息对于通过传统通信渠道无法可靠获得的位于偏远地区的用户特别有益。
4.2 研究内容
(1)驾驶机动分类研究
使用了三种基于窗口的驾驶特征提取方法,机动分类是自动统计进行的,使用主成分分析提取特征和堆叠的稀疏自动编码器。这项研究强调了需要将驾驶机动分类技术作为一种努力消除交通事故并协助汽车用户采用油耗优化方法。研究中用嵌入式智能手机传感器生成基于窗口的数据,然后使用主要组件分析和堆叠稀疏自动编码器提取使用窗口的功能。从这项工作来看,在大多数情况下,窗口较小尺寸可以提高加速和减速操作时的性能。
(2)先进驾驶辅助系统研究
作者进行了先进驾驶辅助系统研究,其中引入了危险驾驶强度(DDI)的概念。通过粒子群优化,针对建模驾驶员、车辆和车道属性,提出了模糊集优化框架。此方法中采用输入传感器以获得驾驶条件和驾驶员条件。
(3)物联网云系统研究
作者做了基于移动传感器数据处理的交通监控物联网云系统和车辆事故预防的研究。基于Open GTS和Mongo DB的流量监控和警报通知,提出一个监控交通和报警通告物联网云系统。通过某些车辆上安装使用的GSM/GPRS/GPS TK103系统跟踪器收集地理位置和速度数据。
(4)通流参数测量研究
基于雷达传感器的交通流参数测量,López等提出了一种其工作频率为24 GHz的基于频率调制连续波配有卫星装置的雷达。他们提出的原型样机通过使用来自目标回波的相位信息来执行杂波消除和目标速度估计。
(5)紧急广播策略研究
本研究提出了一种紧急广播系统,称为适当的车辆紧急情况发布(AVED)方案,以确保车辆在发生交通事故时,车辆的传感器检测到冲击信号并立即发送紧急消息以通知附近的其它车辆,以帮助避免冗余的广播消息。
(6)主动威胁检测研究
针对用于互联汽车,Al-Khateeb等人调查远程或网络劫持互联车辆。他们介绍了网络威胁的主动异常检测技术,即通过贝叶斯估计技术,通过使用行为分析和概况分析概念进行预防这些威胁。
5 基于智能手机传感器数据分析的车型和驾驶活动检测[5]
5.1 研究目的和研究方法
本文呈现给大家的是一种灵活的组合系统,即车辆驾驶活动检测系统(VADS,见文中Figure 1.和Fig⁃ure 2.)。它既能够检测当前车辆模式又可检测到驾驶员当前的驾驶活动。设计系统计算快,对驾驶者的车辆模式或驾驶事件的响应迅速。车辆模式检测模块负责识别机动车辆(如汽车、公共汽车和摩托车)和非机动车辆(如步行和自行车)。该模块设计原则以最大限度地减少智能手机的能源消耗。相比之下,驾驶活动检测模块使用从智能手机的加速计、陀螺仪和磁力计收集的数据来检测各种驾驶活动,即停止、直行、左转和右转。此外,本文还提出了一种方法来计算每种车辆模式和每个驾驶事件的优化数据窗口大小,同时使用训练数据集来优化重叠比率。实验结果表明,该策略大大提高了整体预测的准确性。此外,还进行了大量实验来比较不同特征集(时域特征、频域特征、Hjorth特征)以及各种分类算法(随机森林、朴素贝叶斯、决策树J48、K最近邻和支持向量机)影响到预测精度。在使用随机森林分类器和包含时域特征、频域特征和Hjorth特征的特征集时,作者提出的系统在检测车辆模式时的平均准确度达到98.33%,在识别摩托车驾驶员的驾驶事件时平均准确度达到98.95%。此外,在台湾新台北HTC公司的公共数据比较集中,作者提议的框架获得的总体准确率为97.33%,远高于现有技术水平。
5.2 结论
本文提出了一个灵活的组合系统,它由两个模块组成:一个用于检测用户的车辆模式,一个用于检测瞬态驾驶活动。无论智能手机的定向和位置如何,作者提出的系统在检测车辆模式时均能达到98.33%的精度,在使用随机森林分类器时识别摩托车驾驶员的驾驶事件的平均准确度为98.95%。
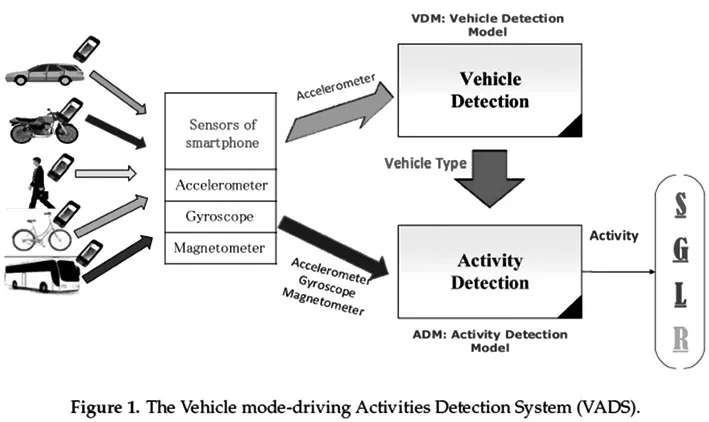
Figure 1.The Vehicle mode-driving Activities Detection System(VADS).
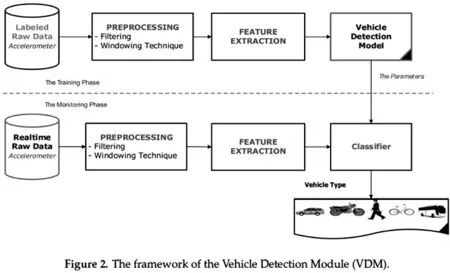
Figure 2.The Framework of the Vehicle Detection Module(VDM).
此外,研究结果显示与使用相同窗口尺寸5s和重叠率为50%的方法相比,最佳参数(窗口尺寸和重叠率)导致系统性能明显增强。具体数据显示,当分别使用随机森林、J48、朴素贝叶斯、KNN和SVM分类器时,车辆模式检测模块将其预测精度分别提高2.73%、3.04%、6.45%、7.37%和5.72%。类似的结果表明,活动检测模块分别对应随机森林、J48、朴素贝叶斯、KNN和SVM分类器,分别获得7.98%、9.06%、8.60%、9.33%和8.48%的预测准确度。请注意,算法1推断的最佳窗口大小范围为4到6 s,这对于实时应用是可行的。此外,NaïveBayes、KNN和SVM分类器显示对特征的相关性非常敏感,因为当添加更多特征时驾驶事件预测准确度降低。相比之下,随机森林和J48分类器不受此影响。
猜你喜欢
环球时报(2022-03-09)2022-03-09
纺织科学研究(2021年1期)2021-12-03
汽车维修与保养(2021年8期)2021-02-16
电子制作(2019年22期)2020-01-14
时代英语·高一(2019年1期)2019-03-13
小太阳画报(2018年3期)2018-05-14
儿童时代·快乐苗苗(2017年7期)2018-01-24
阅读与作文(小学低年级版)(2016年12期)2016-12-22
作文大王·低年级(2016年4期)2016-04-18
决策探索(2014年21期)2014-11-25
