
二次成像型库德式激光通信终端粗跟踪技术
2018-09-03 02:58张家齐张立中董科研李小明
中国光学 2018年4期
张家齐,张立中,董科研,王 超,李小明
(1.长春理工大学 空间光电技术国家地方联合工程研究中心,吉林 长春 130022;2.长春理工大学 空地激光通信技术国防重点学科实验室,吉林 长春 130022;3.长春理工大学 机电工程学院,吉林 长春 130022)
1 引 言
根据我国航天装备体系发展规划,未来将建成“天上三网、地面一网、天地组网”的天地基信息网络体系。作为骨干网之一的信息传输网络,需要具备高速率的数据传输能力,传统微波通信已经无法满足需求。激光通信具有传输速率高、保密性好、抗干扰能力强以及终端体积小、重量轻、功耗低等优势,是解决高速率传输的有效手段。本文以星间激光通信相干接收体制为技术手段,展开通信距离大于45 000 km、通信速率为5 Gbps的星间激光通信演示验证试验,为将来实现高速率激光通信网奠定技术基础[1-2]。
常用的激光通信终端有两种形式:十字跟踪架结构和潜望镜式结构。这两种结构各有优缺点,十字跟踪架结构在相同口径的前提下运动包络更小,但整个光学负载都位于俯仰轴上,负载重量大,后续子光路随负载运动稳定性差。而潜望镜结构后续子光路安装在基座部分相对于基座静止不动,光学稳定性好,但其结构回转半径大[3-6]。针对上述激光通信终端存在的问题,提出库德式激光通信终端[7-9],其结构有运动外包络小和后续子光路稳定性好的特点,如直径250 mm的光学系统,潜望式激光通信系统运动外包络需1 200 mm以上,而库德式激光通信系统运动外包络则仅为400 mm左右;光通过库德光路导入到安装在基座的后续子光路中,后续子光路不随转台运动光学稳定性好。
以高轨对低轨激光通信为使用背景,为缩短建链时间,星间激光通信粗跟踪探测器使用大视场接收信标光,信标光接收视场为4 mrad,望远单元放大倍率为12.5倍,经放大后接收视场为50 mrad。粗跟踪探测器接收信标光需通过望远单元、多块库德反射镜、分光片和粗跟踪透镜组。由于望远单元放大视场角和信标光传输距离长,使得后续子光路光束口径明显增大,分光片镀膜难度显著增加。针对这一问题,本文选择二次成像型库德光路并对其进行设计,在保证光学系统成像质量的同时使信标光光程缩短,缩小后续子光路粗跟踪支路口径。在跟踪捕获时,此结构中的望远单元和库德反射镜与分光片、粗跟踪镜组和探测器间存在相对运动,信标光传递环节多,跟踪模型较为复杂。鉴于此,本文对二次成像型库德式激光通信终端的粗跟踪模型进行推导,并用Matlab-Simulink进行仿真,最后通过试验验证了通信终端的跟踪性能。
2 库德光路形式选择与设计
传统库德光路有3种形式:一次成像形式、无焦形式和二次成像形式。一次成像形式如图1所示,其特点在于卡式物镜和库德光路共用焦距,由于卡式物镜焦距很长,因此在远离物镜处成像。

图1 一次成像式库德光路 Fig.1 Coude optical system of primary imaging
无焦形式如图2所示,其特点是前方两镜系统为一个平行光进、平行光出的望远单元,主次镜联合起来起到缩束的作用,其焦距在无穷远方。
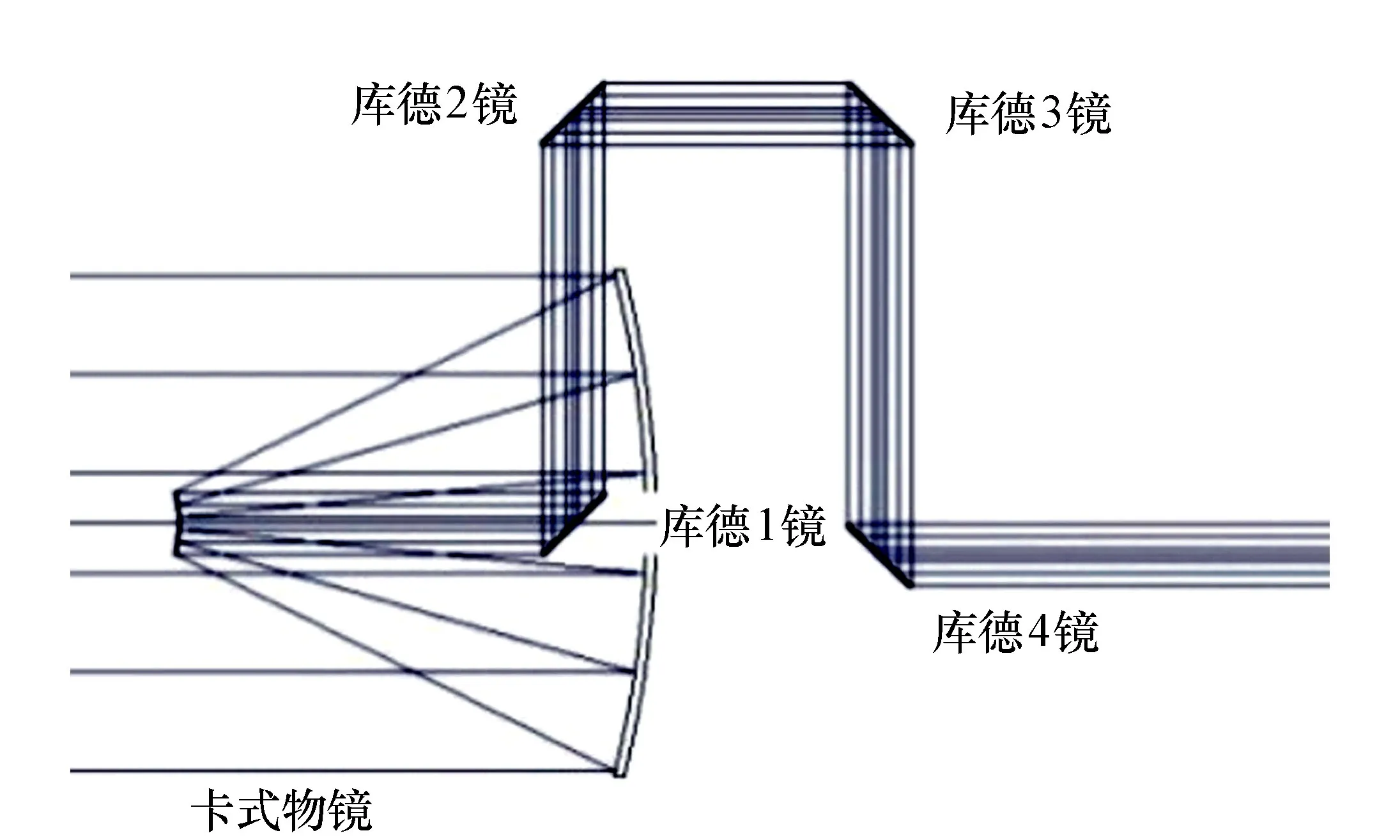
图2 无焦形式的库德光路 Fig.2 A no focal kind of coude optical system
二次成像形式如图3所示,卡式物镜有一次像面,通过一次像面后光束被二次准直镜准直为平行光,再通过库德镜导入后续子光路。
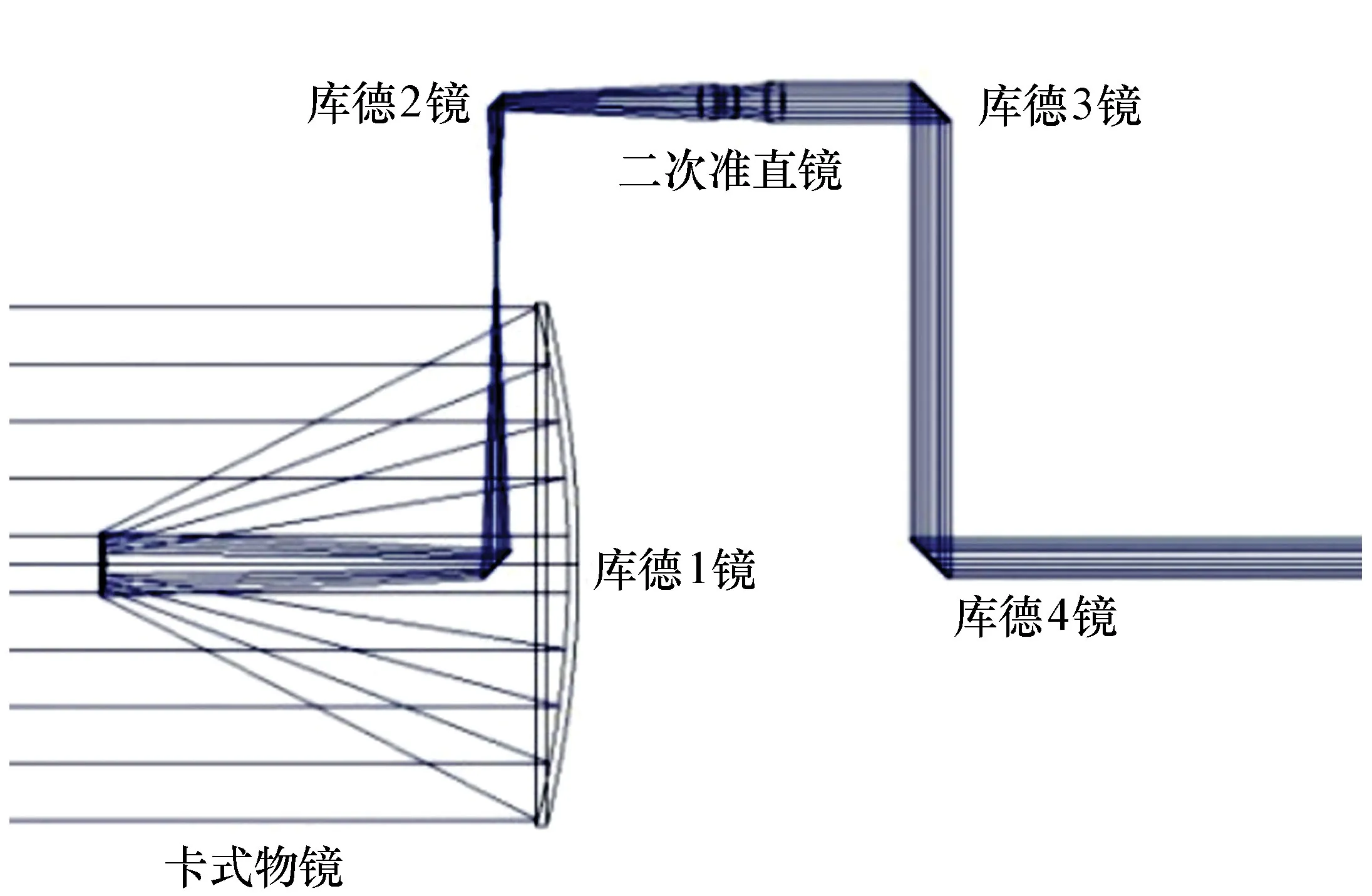
图3 二次成像式的库德光路 Fig.3 Coude optical system of reimaging imaging
上述3种库德光路结构形式中,一次成像式结构末端出射的光束是汇聚光束,激光通信信标光的收发波长与通信光收发波长各不相同,光束进入到后续子光路后需对不同波长进行分光,而非平行光在通过介质分光片时会导致光能的反射/透射效率大大下降,因此一次成像式结构不适合对收发效率要求很高的激光通信系统。
无焦式结构由于两镜缩束系统的出瞳离次镜很近,同时激光通信粗跟踪接收视场较大,来自各视场的光束离开出瞳后就迅速发散,会导致后续子光路粗跟踪支路口径过大,光束口径计算公式为:
(1)
式中,D1为粗跟踪支路光学口径,D0为出瞳时光束直径,a为信标光视场角,n为卡式物镜放大倍率,L为信标光出瞳后到粗跟踪支路的距离。根据公式(1)可知信标光出瞳后到粗跟踪支路的距离L与粗跟踪光学口径D1成正比,此系统光学口径为250 mm,信标光接收视场为4 mrad,望远单元放大倍率为12.5倍,L为845.72 mm,D0为20 mm,由此可计算出无焦式结构的D1粗跟踪支路光学口径为62.3 mm,粗跟踪支路前端的R800T830(反射波长800 nm透射波长830 nm)分光片45°放置,其直径达到88.1 mm。若采用无焦式结构则后续子光路粗跟踪支路重量和体积将会显著增大,直径超过50 mm分光片的镀膜透过率也会降低。
而使用二次成像式结构可以将望远单元部分(包括卡式物镜和二次准直镜)的出瞳延后,从而减小了出瞳到最终像面的距离,有利于缩小后续子光路粗跟踪支路的光学口径[10-11]。
对二次成像型库德光路进行设计,卡式物镜光学结构的一次像面设计在俯仰轴系附近,经过库德1、2镜的两次反射,再经二次准直镜准直为平行光束,经库德3、4镜进入后续子光路。为了缩小子光路光学口径,将望远单元的卡式物镜和二次准直镜之间的距离拉远,从而延后出瞳位置,但二次准直镜的位置靠后也会造成二次准直镜尺寸增大。经反复设计比较后,最终二次准直镜设在库德2、3镜中间,距库德二镜后107 mm,此距离可使整个望远单元(包括卡氏物镜和二次准直镜)的出瞳位置向后移动到达库德3镜附近。L为289.2 mm,通过公式(1)计算得到粗跟踪透镜组的直径为34.5 mm。R800T830分光片直径为48.7 mm光学,结构如图4所示。相同光学系统口径下,二次成像型库德光路比无焦式结构粗跟踪透镜组直径可缩小27.8 mm,R800T830分光片直径缩小39.4 mm。

图4 优化后库德光路光学图 Fig.4 Coude optical system after optimization

图5 库德光路粗跟踪中心视场和边缘视场波前误差 Fig.5 Wavefront error of Coude optical system of the field of view in the rough tracking center and edge
通过选择二次成像式结构减小粗跟踪支路光学口径,从而可降低分光片镀膜难度,减小了后续子光路体积、重量。如图5所示,经分析可知,库德光路粗跟踪支路中心视场波前均方根误差为0.017 0λ(λ=808 nm)和最大边缘视场(4 mrad)波前均方根误差为0.083 4λ(λ=808 nm),两者都优于1/10λRMS (λ=808 nm)。表1为库德式激光通信端机主天线参数。
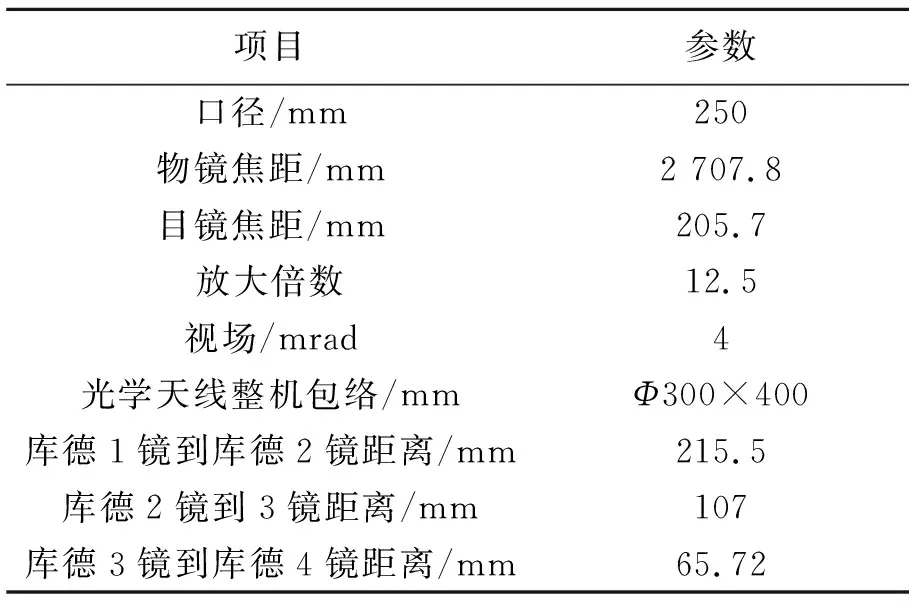
表1 主天线参数
3 二次成像型库德光路光线传输与跟踪模型
捕获时,望远单元和库德反射镜与粗跟踪探测器间存在相对运动,信标光传递环节多,跟踪模型复杂。因此,需要对二次成型库德光路光线传输与跟踪模型进行推导。

图6 库德光路的组成及坐标系 Fig.6 Composition of the Coude optical system and coordinate system
激光通信终端进行捕获时,终端带动卡式物镜进行扫描,信标光到粗跟踪探测器前需经过卡式物镜、库德1镜、库德2镜、二次准直镜、库德3镜、库德4镜、R800透T1550分光片和R808T830分光片,粗跟踪透镜组,如图6所示。
PZT振镜、R800T1550分光片、R808T830分光片、粗跟踪透镜组位于星体的内部,建立基座坐标系,粗跟踪探测器靶面坐标是基座坐标系的Y轴和Z轴[12],库德反射镜随通信终端相对于星体运动,库德1镜相对于坐标系做Z轴和X轴的旋转运动,库德2镜、3镜和4镜相对于坐标系做Z轴旋转运动。信标光沿Z轴入射矩阵是A0=[0 0 -1]T,通信过程中信标光进入卡式物镜中的方向是任意的,通过公式(2)计算出任意角度入射光线A1:
(2)
式中,λ0为信标光与X轴的夹角,α0为信标光与Y轴的夹角。信标光经过库德1镜,若库德1镜静止不动,则其反射矩阵T1为:
(3)

(4)
式中,TGx为绕X轴的旋转矩阵,同时俯仰轴相对于粗跟踪探测器坐标,绕方位轴Z轴转动,其最终的反射矩阵为:
(5)
式中,Gz为绕Z轴的旋转矩阵,库德2镜、3镜和4镜相对于探测器坐标系绕Z轴运动,其矩阵公式(6)所示:

(6)
PZT振镜、R800T1550分光片、R808T830分光片,相对于探测器静止不动,最后探测器接收光斑矩阵A8如公式(7)所示:
(7)

(8)
式中,θEL为当前信标光入射角度下俯仰轴角度,θAZ为当前信标光入射角度下方位轴角度,探测器接收到光斑后,读出探测器的脱靶量,如公式(9)所示:
(9)
式中,F为粗信标透镜组焦距,Y、Z为光斑距离粗跟踪探测器中心的距离即脱靶量。联立方程(8)和(9)求得信标光的入射角度:
(10)

(11)
式中,φEL为跟踪时调整的俯仰角,坐标系经过俯仰轴的转动后,方位轴Z轴发生了变化,其Z轴的单位向量变为a=[0 -sinθEL-cosθEL]T,绕单位向量a旋转后得到的方位跟踪矩阵为:
(12)

(13)
通过公式(13)的模型,通信终端可以根据粗跟踪探测器脱靶量位置,计算出方位和俯仰跟踪转动的角度,实现通信终端对目标的跟踪。
4 库德光路跟踪模型仿真
使用Matlab-Simulink对库德光路的跟踪模型进行仿真,其仿真模型如图7所示。
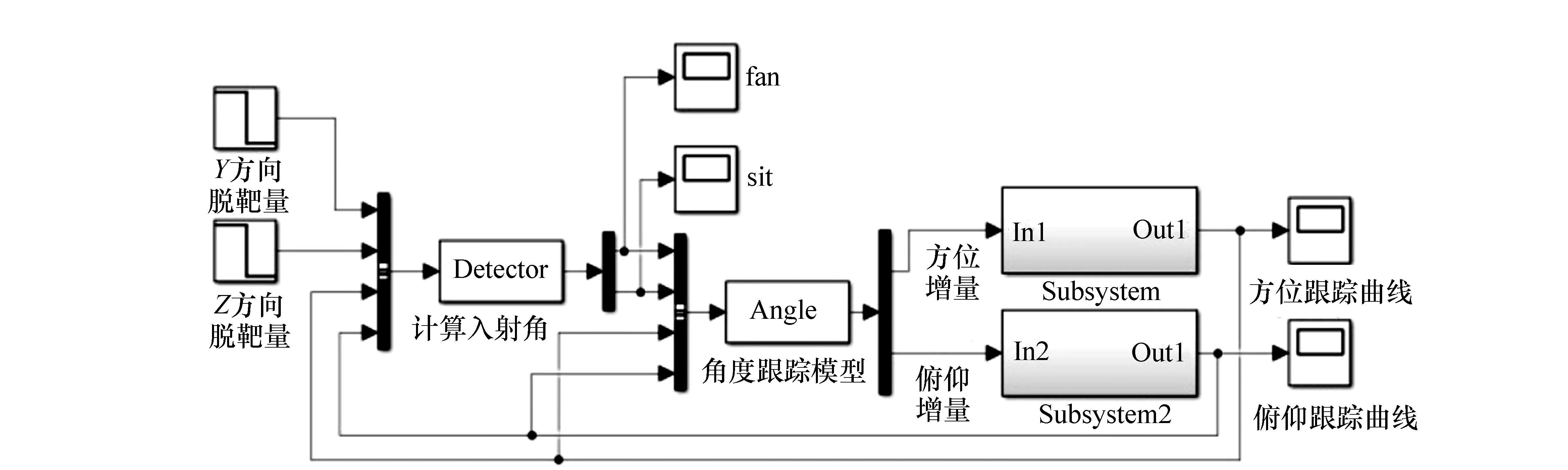
图7 跟踪仿真模型 Fig.7 Tracking simulation model
图中,Y方向脱靶量和Z方向脱靶量是粗跟踪相机对光斑的判读值,计算入射角模型内写入公式(10)数学模型,角度跟踪模型写入公式(13)中φEL和φAZ的数学模型,int1和int2内为电机控制模型。
粗跟踪最大跟踪视场为±4 000 μrad,如图8所示,使用Matlab分别在Y方向脱靶量范围和Z方向脱靶量范围内随机取若干组合坐标,终端俯仰和方位转动范围分别为±20°和±100°,用同种方法在转动范围内取若干方位、俯仰角度坐标组合,分别把脱靶量和初始角度带入跟踪仿真模型中进行仿真,通过所取数值计算出方位和俯仰的角度增量值,通信终端均可将光斑移动到靶面中心实现跟踪。
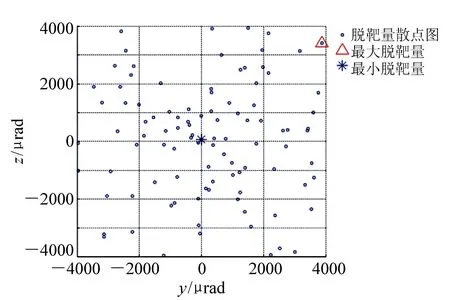
图8 脱靶量散点图 Fig.8 Miss distance scatter plot
以俯仰20°、方位100°最大转动角度初始值下,靠近中心视场和边缘视场的两个随机光斑位置为例,这两组脱靶量分别为(-0.1×10-5rad,0.7×10-5rad)、(3.88×10-3rad,3.41×10-3rad),通过跟踪仿真模型分别算出图9(a)和图10(a)方位和俯仰的角度增量,最后根据角度增量值控制电机转动角度,由于电机控制算法的原因,曲线出现超调,随后将光斑稳定在视场的中心,如图9(b)和图10(b)所示。
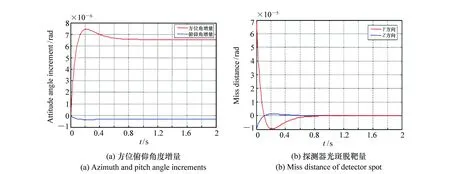
图9 中心视场附近角度增量和光斑脱靶量 Fig.9 Angle increment and spot miss distance near the center of view
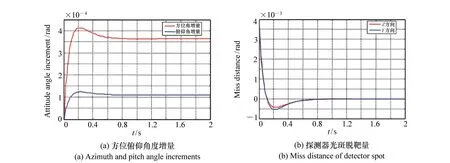
图10 边缘视场附近角度增量和光斑脱靶量 Fig.10 Angle increment and spot miss distance near the edge of the field of view
使用Matlab-Simulink建立仿真模型,对二次成像型库德式激光通信端机跟踪模型进行仿真,仿真结果显示跟踪模型可以实现对信标光的跟踪,证明跟踪模型正确性。
5 激光通信粗跟踪试验
通过试验验证二次成像型库德式激光通信终端跟踪模型的正确性及整个系统的跟踪性能。粗跟踪测试试验方案如图11所示,其中10 m离轴光管模拟远距离目标终端,平行光管焦面附近设置波长808 nm激光器作为目标终端的信标发射源,激光器前端架电磁振镜,电磁振镜用于模拟平台振动特性。其时域振动曲线根据卫星平台振动谱模拟振动源[13]如图12所示。
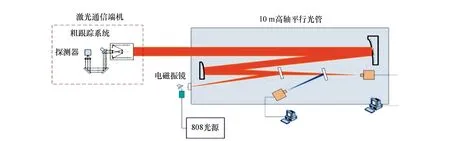
图11 粗跟踪测试试验方案 Fig.11 Test program of rough tracking

图12 卫星平台振动时域曲线 Fig.12 Time domain curve of vibration of satellite platform
激光通信终端固定在摇摆台上,摇摆台用于模拟平台姿态大幅度运动特性,摇摆台激励信号为最大速度0.5°/s、最大加速度0.05°/s2的正弦角度曲线。
试验过程中,开启通信终端的粗跟踪模式,对目标信标发射源进行扫描,粗跟踪探测器接收到信标光后得到脱靶量信息,通过跟踪模型得到电机转台角度增量,控制电机使光斑和探测器中心重合实现对信标光的跟踪[14-16]。
记录在外界扰动下跟踪稳定时探测器接收到光斑的实时脱靶量,并通过统计分析多组脱靶量数据得出粗跟踪精度,检测出的数据如图13所示。

图13 粗跟踪误差曲线 Fig.13 Coarse tracking error curve
其中左图为实测方位跟踪脱靶量,右图为实测俯仰脱靶量,实测方位跟踪最大脱靶量为84.65 μrad(3σ),均方差为16.21 μrad;实测俯仰最大脱靶量为56.33 μrad(3σ),俯仰跟踪均方差为17.78 μrad。满足技术指标要求150 μrad(3σ)。
6 结 论
针对激光通信终端光学负载稳定性差和安装空间受限情况下存在的问题,提出了采用库德式激光通信终端作为解决方案。介绍了3种传统的库德光路形式,经分析对比,选择二次成像型库德光路作为终端并对其进行设计,通过缩小粗跟踪支路口径,降低分光片镀膜难度,减小后续子光路体积和重量。接着,对其跟踪模型进行了推导,通信终端可以根据粗跟踪探测器脱靶量计算出方位和俯仰跟踪所需转动的角度,实现终端对目标的跟踪。最后通过仿真和试验验证其算法的正确性和系统的跟踪性能。结果显示:实测方位跟踪最大脱靶量为84.65 μrad(3σ),均方差为16.21 μrad;实测俯仰最大脱靶量为56.33 μrad,俯仰跟踪均方差为17.78 μrad。满足星间激光通信粗跟踪捕获跟踪150 μrad(3σ)技术要求,此结构和跟踪模型对类似的激光通信粗跟踪系统有一定的指导意义。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
科学技术创新(2021年25期)2021-09-11
中国惯性技术学报(2020年6期)2020-04-06
中国医疗设备(2019年1期)2019-01-15
中学物理·高中(2018年10期)2018-11-06
铁道通信信号(2018年3期)2018-04-19
理科考试研究·初中(2017年5期)2018-03-07
发明与创新(2016年17期)2016-12-22
全球定位系统(2015年4期)2015-02-28
中国高新技术企业·综合版(2013年1期)2013-02-04
