
基于OLED微显示器和变形目镜的全景显示技术
2018-09-03 02:58郭俊达金伟其
中国光学 2018年4期
郭俊达,金伟其,顿 雄,裘 溯,李 力
(北京理工大学 光电学院 光电成像技术与系统教育部重点实验室,北京 100081)
1 引 言
在军用和公安警用等夜视装备中,头盔夜视镜、夜视观察仪和车辆夜视辅助驾驶仪是最常见的夜视装备,主要包括微光夜视或红外热成像两种模式。人类视觉虽然在集中注视观察的视场只有大约25°,但实际具有120°的感知视场。通常夜视头盔成像视场都不超过40°,夜视侦察/观察仪视场则更小[1]。传统的光电成像系统的分辨率(包括探测器、显示器和光学系统等)难以适应在大视场条件下对目标景物探测和识别的要求,即无法同时满足大视场和高分辨率的要求,因此发展大视场高分辨的夜视观察仪成为国内外研究的重要方向之一。
近年来,大面阵固体成像器件[2-3]及诸如高清晰、4K等显示器件发展迅速,为大视场高分辨成像提供了可能。但是在一些关键岗位值守对周边态势的感知、装甲车辆/防爆车/运钞车等内部对外界态势警戒等应用中,小视场观察犹如“管中窥豹”,迫切需要在适当数据量限制条件下获得一定垂直视场下的全景或周视高分辨成像,但在体积、重量和功耗等的限制下,现有技术往往难以有效适应应用的需求。目前采用面阵探测器扫描[4-7]、多摄像机排列的全景拼接成像[8-11]以及鱼眼透镜成像[12-13]等均已获得成功的应用,但全景成像的显示仍然受到显示器分辨率的限制,难以兼顾水平方向的全景显示和垂直方向的分辨率无损显示。
有机发光OLED微显示器作为夜视仪器中常见的显示器件,具有诸多优异特性,常见像素规模为SVGA(800×600)和SXGA(1 280×1 024)。鉴于微光夜视与热成像大多为黑白图像,本文拟研究一种基于变形目镜+OLED微显示器、水平显示像素扩大3倍的全景图像显示方法,以实现高分辨的全景灰度图像显示,为实际夜视成像应用提供一种可行的全景显示技术。
2 基于OLED微显示器+变形目镜的全景显示方法
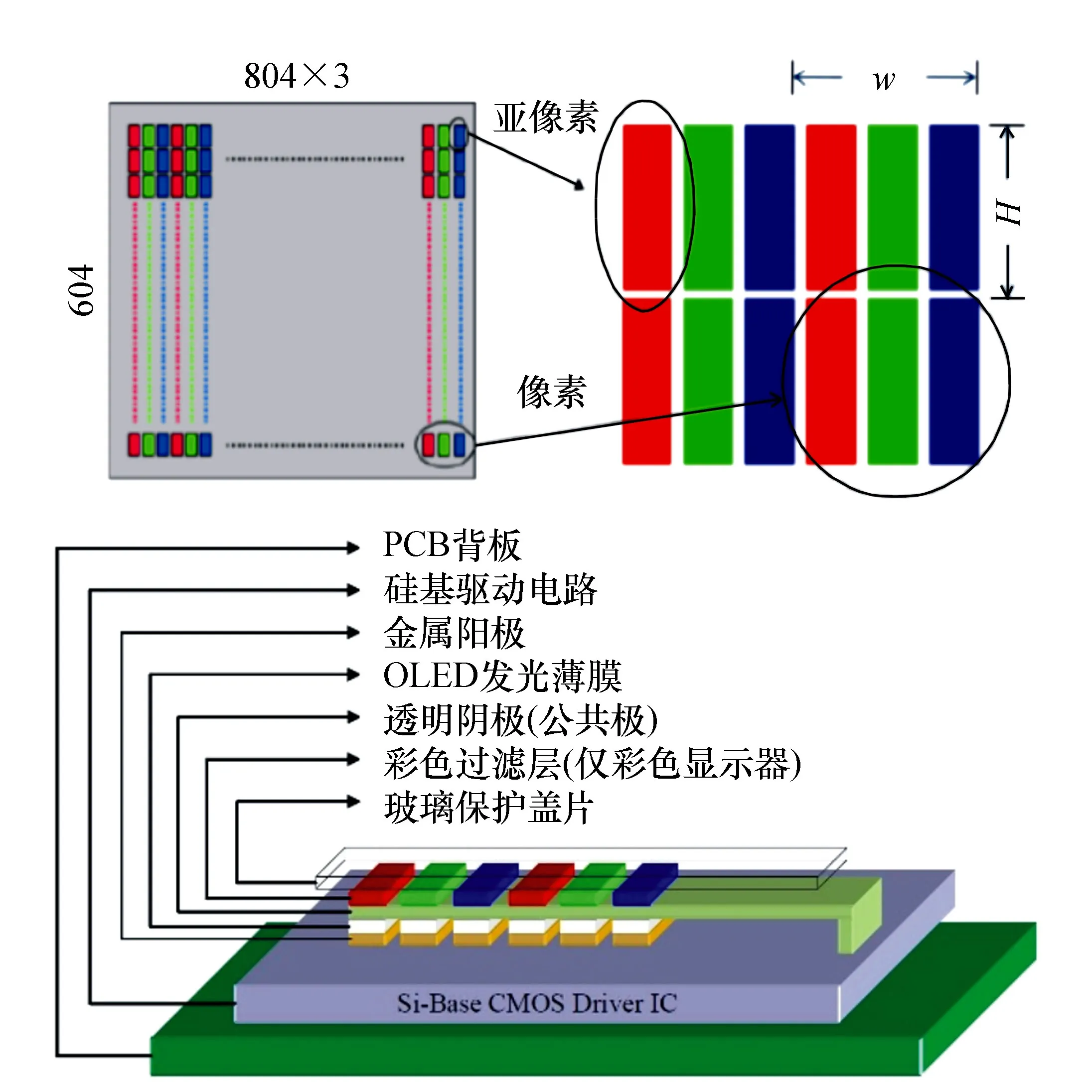
图1 彩色OLED微显示器及其RGB像素滤光片结构图 Fig.1 Framework of color OLED micro-display and RGB pixel filter array
目前国内奥雷德公司OLED微显示器主要有SVGA (800×600)和SXGA(1 280×1 024)两种模式,尺寸有0.5、0.61和0.97英寸3种规格[14],通过不同信号驱动板可实现标准模拟/数字视频图像显示。 图1给出彩色OLED微显示器及其RGB像素彩色滤光片阵列的结构示意图,单个显示像素是由水平排列的3个高宽比约3∶1的子像素,并分别覆盖RGB三基色彩色滤光片阵列构成,像素宽度W与高度H基本相当,故子像素呈长方形结构。对于彩色图像的显示,由于人眼视觉可分辨尺寸大于子像素尺寸,故视觉感觉为RGB三色信号合成颜色(即空间混色),可实现彩色图像的有效显示。对于单色图像的显示,既可采用彩色OLED微显示器按照R=B=G的驱动模式显示,也可通过不带彩色滤光片阵列的微显示器实现。
鉴于彩色OLED微显示器采用了RGB子像素水平排序的结构,为其转化为高分辨黑白OLED微显示器奠定了技术基础。我们将SVGA(800×600) {或SXGA(1 280×1 024)}像素的彩色OLED微显示器的彩色滤光片去除,并以每一个RGB子像素作为一个显示像素,这样可将常规OLED微显示器的像素数横向扩大3倍,在不增大显示器尺寸的条件下,获得2 400×600(或3 840×1 024)像素的黑白OLED微显示器。但这样会使显示的全景图像纵横比压缩为原来的1/3,需要通过水平和垂直方向的放大率相差3倍的变形目镜,将OLED微显示器上压缩显示的全景图像恢复成正常的全景图像。
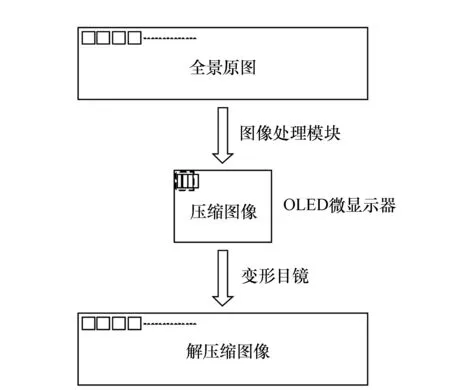
图2 全景显示原理示意图 Fig.2 Schematic diagram of panoramic display
这里以SVGA微显示器为例,说明实现全景显示的原理。如图2所示,处理过程大致可分成两个步骤:
(1)利用图像处理模块完成全景图像纵横比的压缩操作,将2 400×600分辨率的全景原图(纵横比为4:1)在800(×3)×600分辨率的OLED微显示器(纵横比为4∶3)上压缩显示;
(2)利用变形目镜完成全景图像纵横比的解压缩操作,将OLED微显示器上的压缩图像(纵横比为4:3)放大且水平3倍拉伸,得到的解压缩图像(纵横比为4∶1)显示。
3 一种技术验证系统的设计及测试
3.1 验证系统的设计
为了验证上述全景图像的显示方法,本文设计了一套基于3个摄像机并列的全景摄像机、图像处理模块、SVGA微显示器以及基于大目镜+变形成像透镜组的变形目镜组成的全景显示实验系统(如图3)。
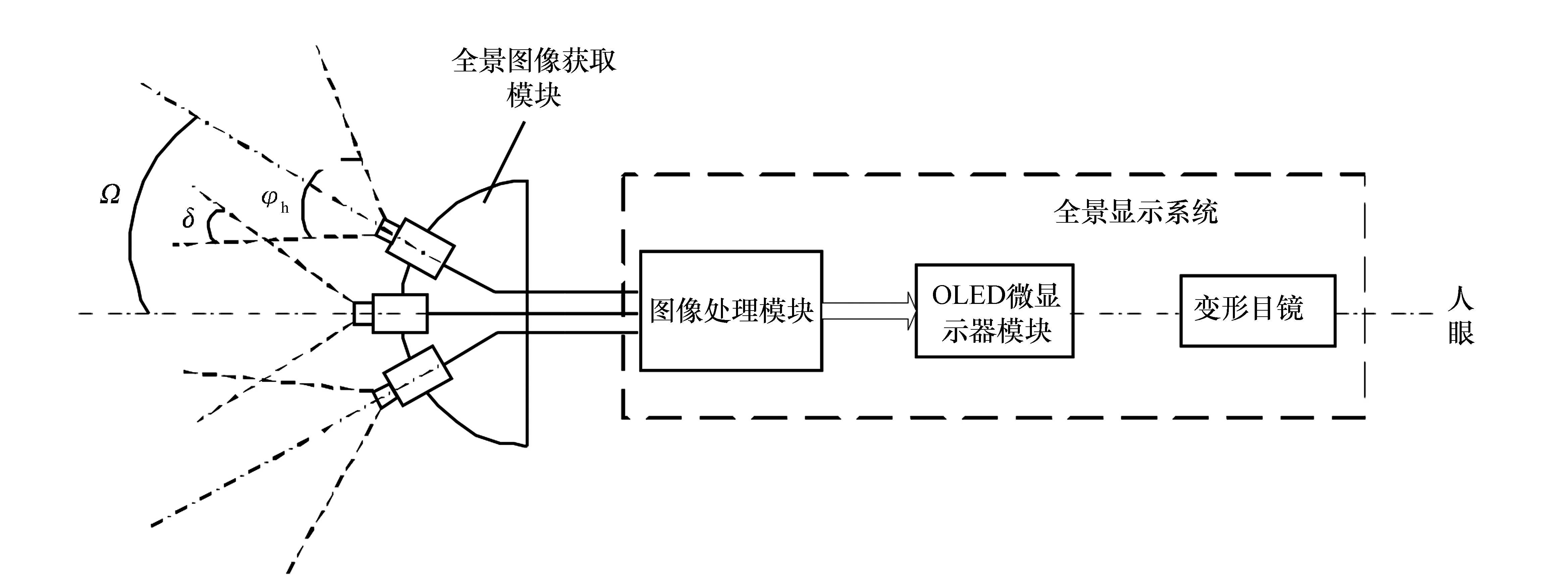
图3 系统总体结构框图 Fig.3 Block diagram of system overall structure
3.1.1 全景图像获取以及OLED微显示器模块
全景图像的获取模块采用安装在圆弧支架水平布局且同步控制的3个低照度工业摄像机组成,各摄像机成像视场φh×φv(与探测器光敏面尺寸和物镜焦距有关),摄像机光轴沿圆弧支架径向向外且相邻摄像机光轴的夹角Ω与摄像机水平视场φh-δ一致(δ为重叠视场),由此实现(3φh-2δ)×φv视场范围内全景图像的同时获取。例如选取摄像机视场角φh为66°×49.5°,重叠视场δ为9°,相邻摄像机光轴夹角Ω为57°,得到半周视180°水平视场角的全景图像。

图4 SVGA模式OLED微显示器 Fig.4 SVGA mode OLED micro-display
如图4,OLED微显示器模块选用奥雷德公司特定不带像素彩色滤光片阵列(CFA)的常规彩色OLED微显示器及其驱动电路板,OLED微显示器分辨率800(×3)×600,有效显示区域10.13 mm×7.61 mm,用于实现全景图像的压缩显示。由于显示器像素尺寸为12.6 μm×12.6 μm,在拓展水平子像素并忽略子像素间隔条件下,全景显示器的像素分辨力约为119.05 lp/mm×39.68 lp/mm。
3.1.2 图像处理模块
由于图3所示3个摄像机采集的图像之间往往存在相邻视场的重叠,需要进行视频图像拼接融合才能得到全景图像。本文方案设计了两种全景图像的显示模式:
(1)基于全景拼接摄像机的全景图像显示(需要进行全景图像的拼接等预处理);
(2)对静态全景图像的显示(用于分辨力测试和全景图像效果的分析)。
本文主要完成静态全景图像的显示功能。
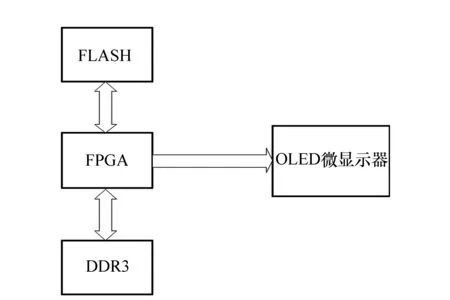
图5 硬件原理图 Fig.5 Schematic diagram of hardware
图像处理模块采用以FPGA+FLASH+DDR3为核心的FPGA开发板,完成图像存储、缓存、图像预处理与传输任务。模块的硬件原理图如图5所示,FPGA为Xilinx公司Spartan-6系列XC6SLX45,FLASH为Winbond公司W25Q128FV,DDR3为Micron公司MT41J128M16LA-187E,处理系统能够完成对全景图像数据的处理和缓存需求。
图像处理模块将存储于FLASH中全景图像数据转存到读写速度更快的DDR3,图像信号编码以每3个水平像素的图像信号按照RGB信号模式重新进行组合分配,作为OLED微显示器独立显示像素的驱动信号。
在编码分配过程中,800(×3)×600分辨率OLED微显示器上的压缩图像对应2 400×600分辨率全景灰度图像的像素灰度值关系为:
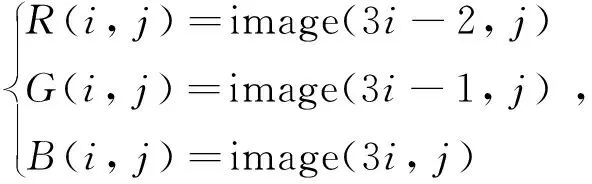
(1)
式中,i、j为OLED微显示器显示图像的像素坐标,R、G、B分别为OLED微显示器上各像素拆分出来的3个子像素的灰度值,image为全景原图各像素的灰度值。
OLED微显示器的驱动板接收到驱动信号,可获得全景图像水平压缩3倍的图像显示。
3.1.3 变形目镜
由于在OLED微显示器上压缩显示的全景图像纵横比缩小为正常的1/3,为了使图像恢复正常显示,需要开展变形目镜光学系统的设计。虽然可设计小型化的变形目镜,但鉴于本文主要是验证全景图像显示模式,因此采用了基于现有光学部件和元件的设计模式。
大目镜是一些特种车辆光电成像装置常用的一种目镜类型,其较大的出瞳口径和距离为在车内运动环境下的观察提供了条件。因此,本文采用了某种现有大目镜+变形成像透镜组构成混合变形目镜的设计方案。如图6,大目镜的主要参数为倍率约5.6×,出瞳直径约75 mm,分辨力大于30 lp/mm,为Φ25 mm像管屏幕图像提供显示;变形成像透镜组的水平放大率是垂直方向的3倍,用于使OLED微显示器上压缩的全景图像恢复正常的图像纵横比。
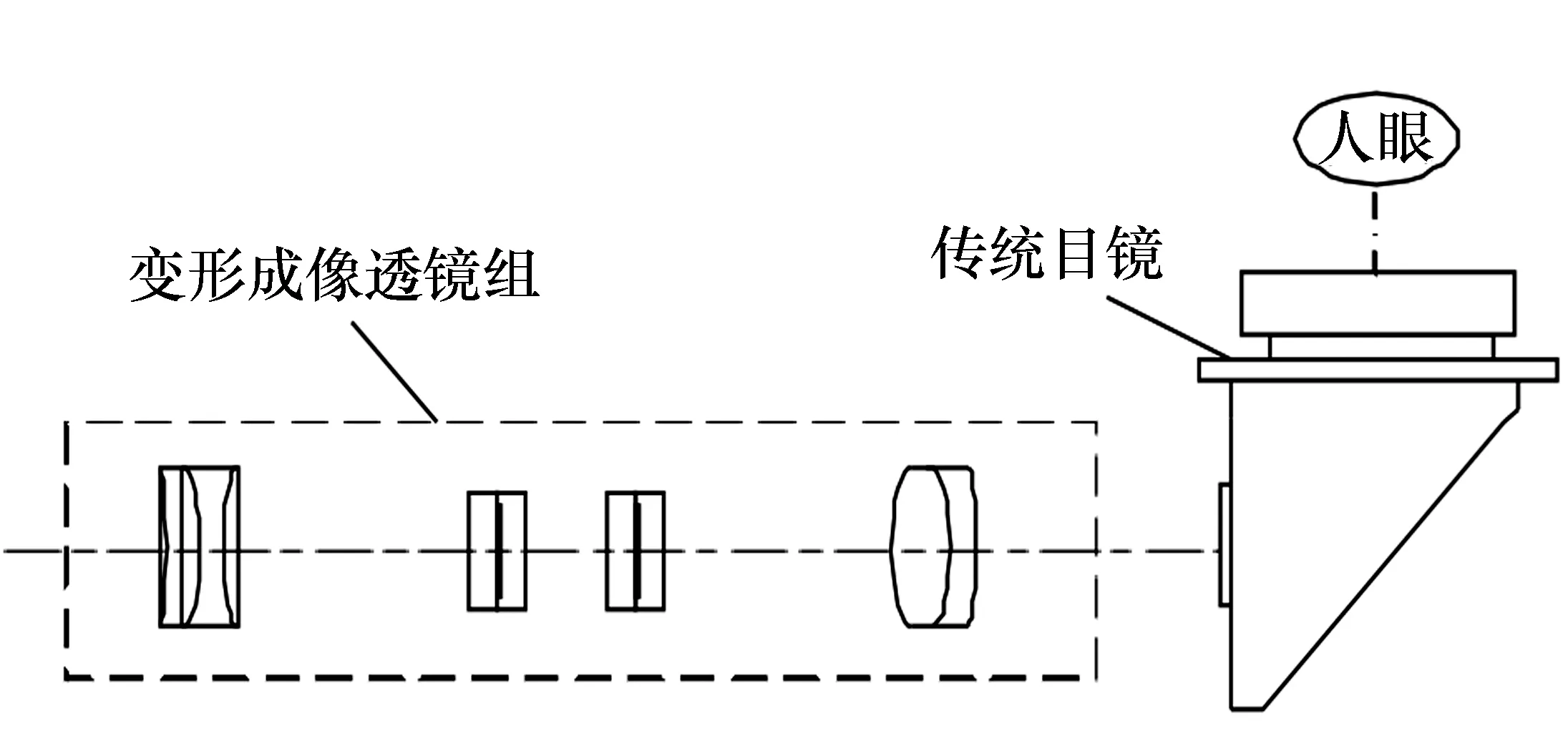
图6 变形目镜整体结构示意图 Fig.6 Schematic diagram of anamorphic eyepiece overall structure
由此,变形目镜设计的核心就成为了变形成像透镜组的设计。为了实现变形比为3的成像,变形成像透镜组需要满足条件:
(1)透镜组水平和垂直方向的放大倍率比为3;
(2)同一个物点发出的光线经过透镜组后,其在水平和垂直两个方向必须汇聚于同一个像点,即共轭距离相同。
根据几何光学的物像共轭理论,对于物空间的一物点M,任何一个光学系统或光学元件在像空间必有且只有一个像点N与之共轭,反之亦然[15]。因此,可通过移动透镜位置,使当前的物距和像距交换,且共轭距离保持不变。这样,对于同一个透镜就存在两个透镜位置(如图7的位置1和位置2),其放大倍率刚好相反,但共轭距离相同。由于柱面透镜只在一个方向有汇聚作用,另一方向相当于厚度不同均匀介质板,没有汇聚作用[16],刚好可以满足这样的需求。因此,可利用两块完全相同的柱面透镜垂直(柱线方向相互垂直)放置于位置1和位置2,这样既能提供水平和垂直方向不同的放大倍率,又能保证光学系统在两个方向上的物像共轭距离相同。
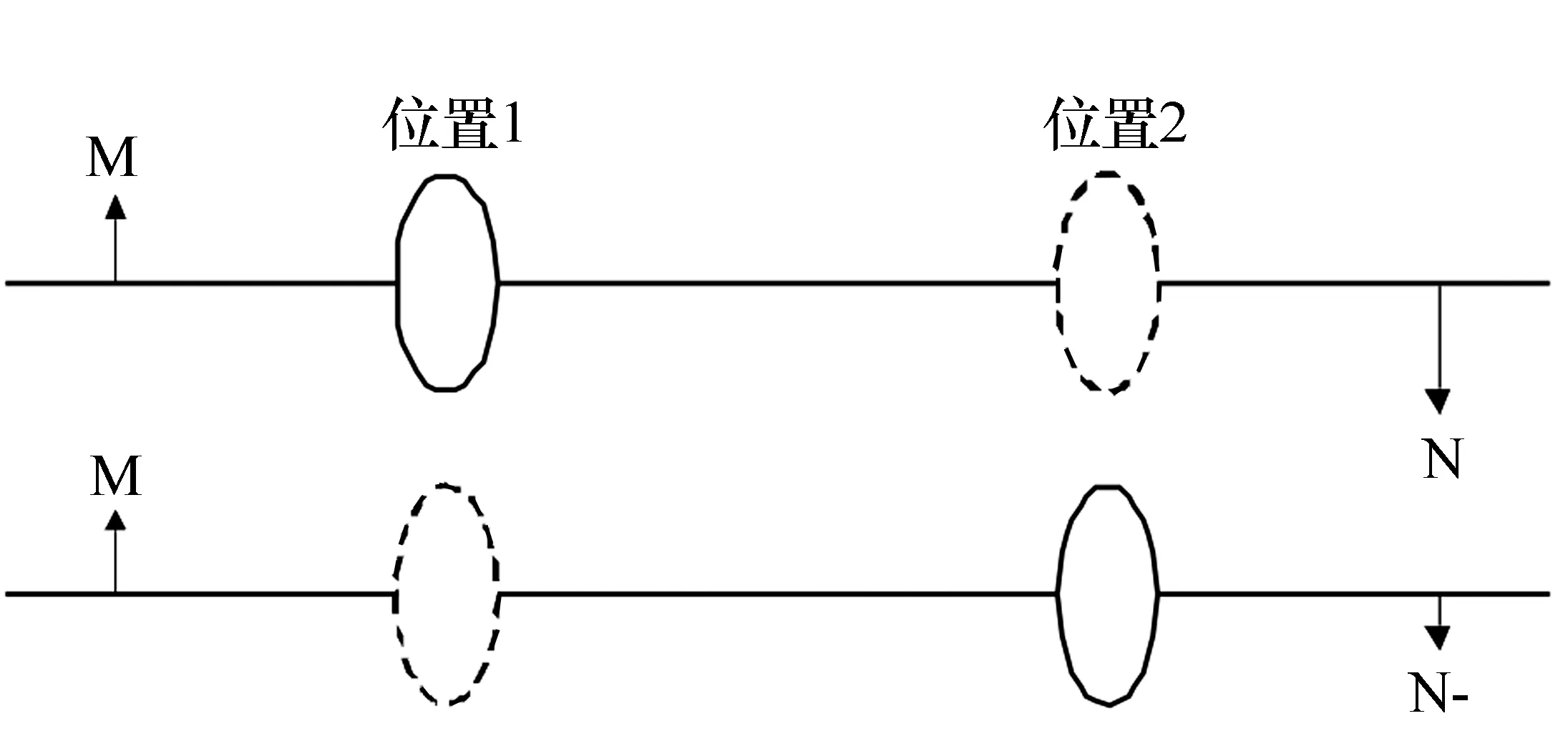
图7 物像共轭关系 Fig.7 Object-image conjugate relation
按照前述思想,设计的变形成像透镜组光学结构如图8所示。设计中的透镜全部选用了商业产品目录中的现有产品。为了解决系统的像差校正问题,在设计中柱面透镜选用柱面消色差透镜,并在对称位置增加了两个相同的消色差球面透镜,以降低整个系统各个透镜的光焦度需求,减小各透镜的单色像差以及系统的单色像差。
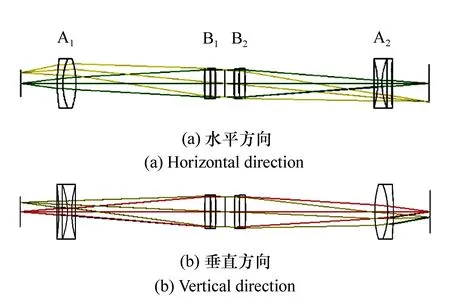
图8 变形成像透镜组 Fig.8 Anamorphic imaging lens group
图8中,假设柱面透镜A1在水平方向的放大倍率为α,根据物像共轭原理,另一个柱面透镜A2在垂直方向的放大倍率为1/α。同时,若其中球面透镜B1的放大倍率为β,则另一个球面透镜B2的放大倍率为1/β。于是,变形目镜的放大倍率λ为:
(2)
满足变形成像透镜组3倍的变倍比只需:
(3)

最终设计的变形成像透镜组参数详见表1,光学总长249.3 mm,视场10.13×7.61 mm,与OLED微显示器有效显示区尺寸一致,工作波段(400~700) nm。如图9,选用THORLABS公司消色差柱面透镜ACY254 -050-A (Φ1英寸,f=50 mm)和消色差双胶合透镜AC254-125-A-ML(Φ1英寸,f=125 mm)。ZEMAX软件仿真的变形成像透镜组视场中心、半视场和全视场的子午(T)和弧矢(S)MTF曲线如图10所示。可以看出:由于透镜组水平和垂直方向的放大率不同,使得中心视场、水平/垂直轴外视场及轴外点的子午/弧矢方向等对应的传递函数也不相同:

图9 选用透镜实物图 Fig.9 Object diagram of selected lens
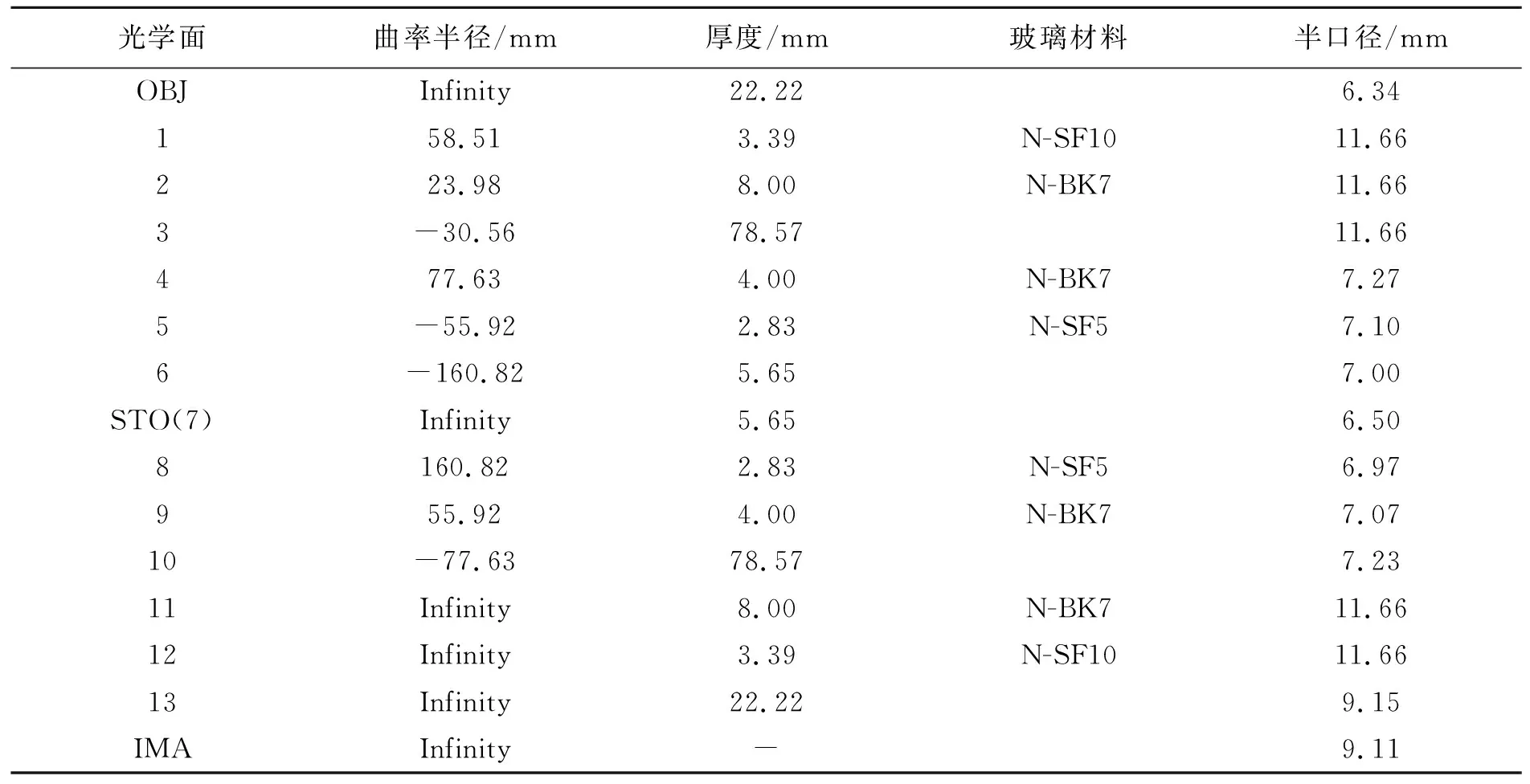
光学面曲率半径/mm厚度/mm玻璃材料半口径/mmOBJInfinity22.226.34158.513.39N-SF1011.66223.988.00N-BK711.663-30.5678.5711.66477.634.00N-BK77.275-55.922.83N-SF57.106-160.825.657.00STO(7)Infinity5.656.508160.822.83N-SF56.97955.924.00N-BK77.0710-77.6378.577.2311Infinity8.00N-BK711.6612Infinity3.39N-SF1011.6613Infinity22.229.15IMAInfinity-9.11
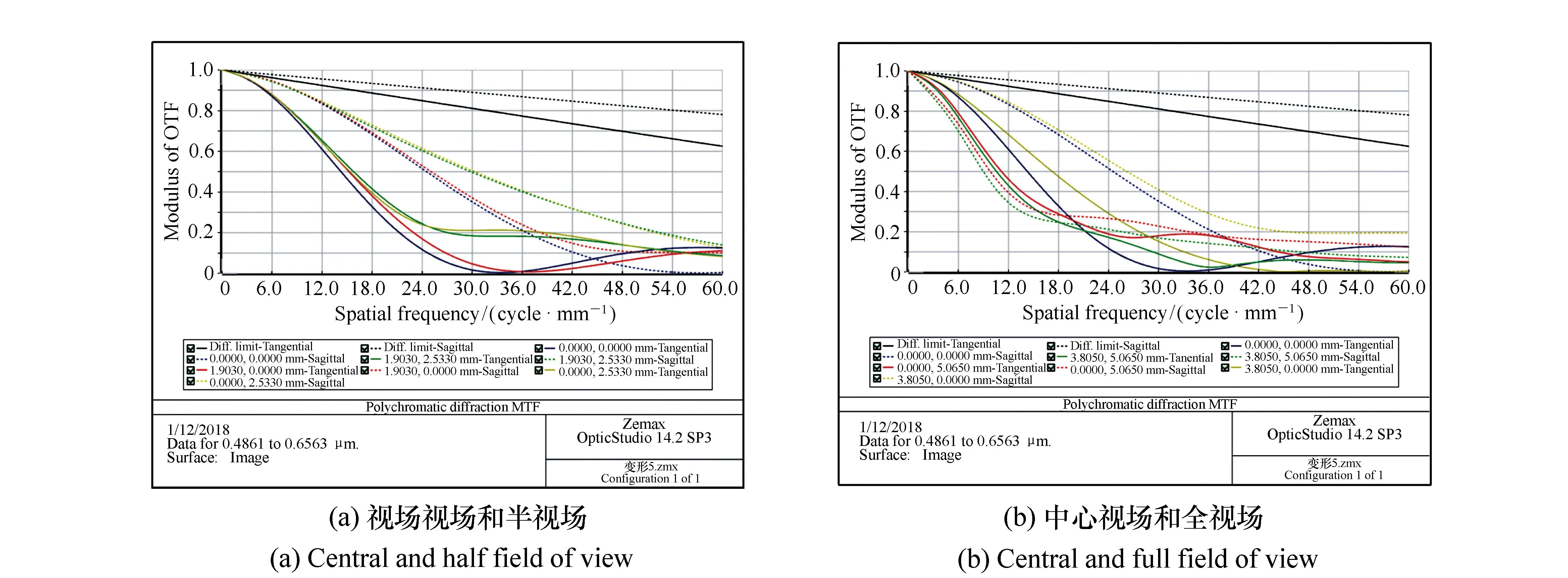
图10 变形成像透镜组的MTF曲线 Fig.10 MTF curves of anamorphic imaging lens group
(1)中心视场:水平/垂直分辨力分别约47和27 lp/mm;
(2)半视场:垂直方向的子午/弧矢MTF均优于轴上点,子午/弧矢分辨力达到30和60 lp/mm以上;水平方向的MTF均优于轴上点,子午和弧矢方向的分辨力均达到60 lp/mm以上;
(3)全视场:垂直方向的子午/弧矢MTF均优于轴上点,子午/弧矢分辨力达到37和60 lp/mm以上;水平方向的MTF在低频时较差,但极限分辨力均达到60 lp/mm以上。
总体上,采用现有光学部件搭建的系统像差优化尚不足,水平分辨力未达到理想条件下的3倍。通过专门设计的变形目镜系统,采用更大的放大倍率和像质优化,可进一步提高成像质量。
按照目前的设计,全景变形目镜放大率为(9.66×)×(3.22×)。若以目前实用像增强器分辨力大于50 lp/mm为例,大目镜分辨力应不低于50 lp/mm,经过倍率转换后在显示器面的分辨力f1m不低于86.60 lp/mm(H)和28.86 lp/mm(V)。于是,大目镜+变形成像透镜组(分辨力f2m)的组合分辨力fm为:
(1/fm)2=(1/fm)2+(1/f2m)2.
(4)
由于全景显示器像素分辨力约为119.05 lp/mm×39.68 lp/mm,双像素分辨力约为59.52 lp/mm×19.84 lp/mm。利用上述分辨力分析和式(4),不难得知基于现有大目镜+变形成像透镜的组合变形目镜难以达到全景显示器像素的分辨力,但应能区分双像素线条,即水平方向能实现亚像素(双子像素)的显示。
3.1.4 验证系统搭建
依据上述设计搭建了全景显示验证系统,如图11所示,其中,组合变形目镜模块采用共轴笼式机械结构进行装配,以使系统易于调节和保持结构的稳定性。

图11 实验系统整体实物图 Fig.11 Object diagram of experimental system
3.2 验证系统的性能测试
3.2.1 变形目镜成像效果测试
将绘制的正方形网格打印至铜版纸上作为测试网格靶标,置于验证系统OLED微显示器显示屏位置。如图12所示,可以看出物方正方形网格通过变形目镜后变成了长方形网格图像;进一步在大目镜像方用数码相机拍摄网格图像,通过对采集到的网格图像测量水平和垂直两个边长计算变形比基本为3:1,符合变形目镜设计的预期成像效果。
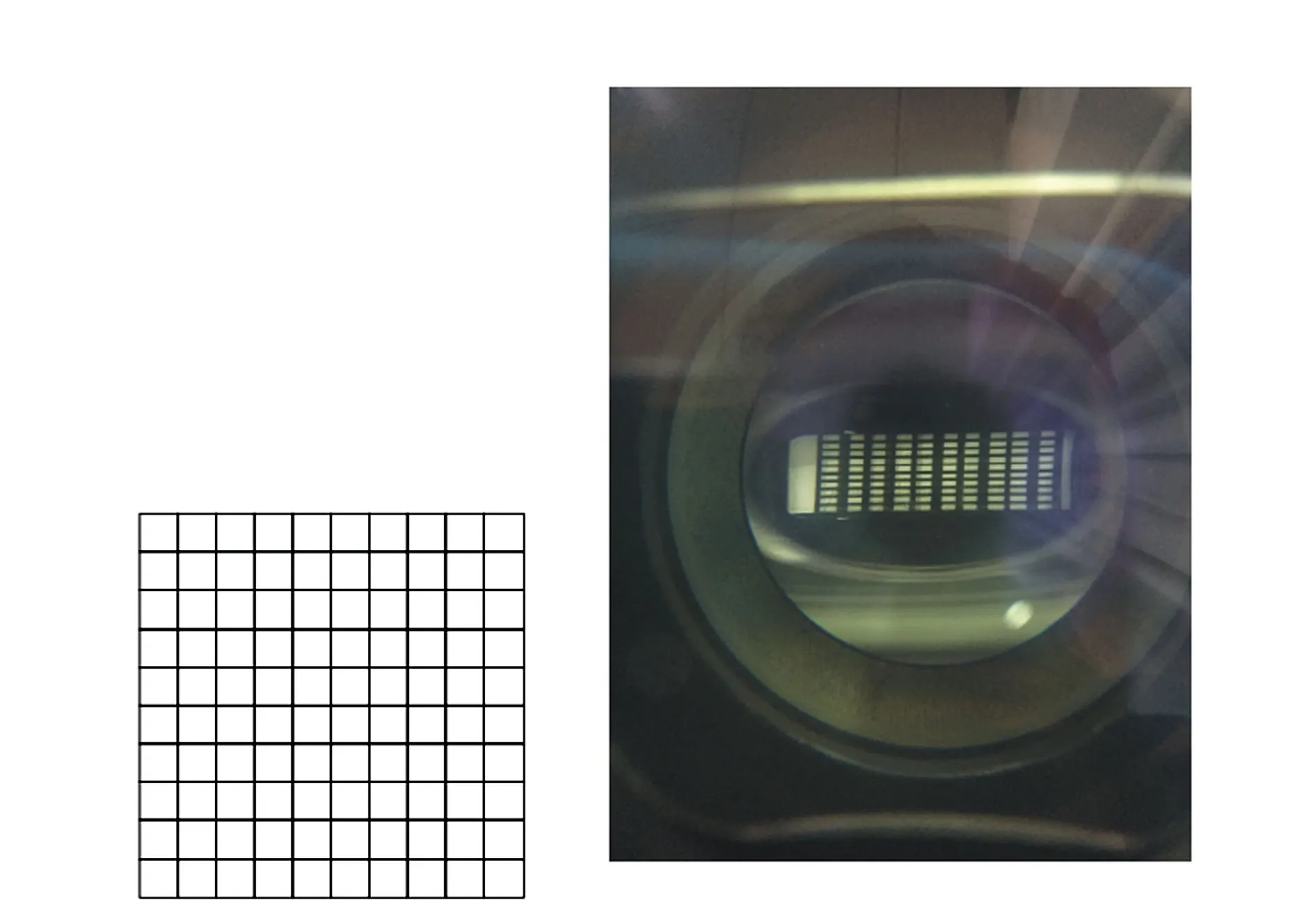
图12 正方形网格及其成像效果 Fig.12 Square grid and imaging effect
3.2.2 变形目镜光学分辨力测试
利用MATLAB制作了一幅2 400×600像素的简易分辨力测试靶图像(如图13),考察变形目镜在OLED微显示器有效显示区不同区域的分辨力。每个考察区域的分辨力测试组群均包含5组水平和垂直排列黑白条纹,黑白条纹宽度从5个像素至1个像素依次递减,对应组别号分别表示为1、2、3、4和5(即组别号越高,分辨力越高)。
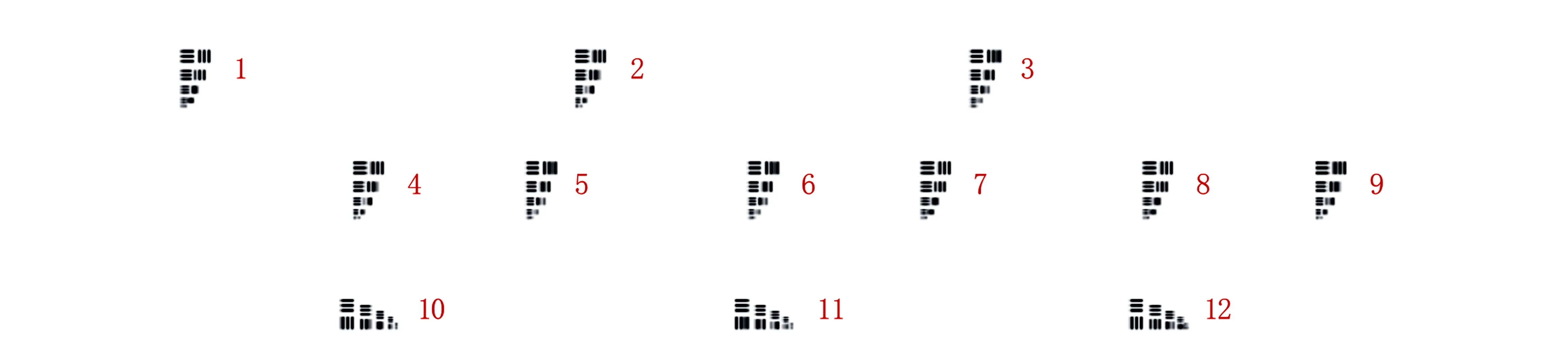
图13 变形目镜的分辨力测试靶原图 Fig.13 Resolution test target of anamorphic eyepiece
利用图像处理模块驱动分辨率测试靶并显示于OLED微显示器上,从变形目镜上拍摄的测试靶效果如图14所示。采用主观测试评价方法,通过5个观察者从变形目镜观察的分辨力结果如表2所示。可以看出:全靶面均难以分辨单像素的靶标条纹(水平方向为子像素,垂直方向为单像素),但大部分区域均能区分双子像素靶标条纹(水平方向对原大像素相当于亚像素),少部分区域只能区分到3像素靶标,这与前面传递函数分析的结论是一致的。
图14 分辨力测试靶观察效果图 Fig.14 Observation of resolution test target
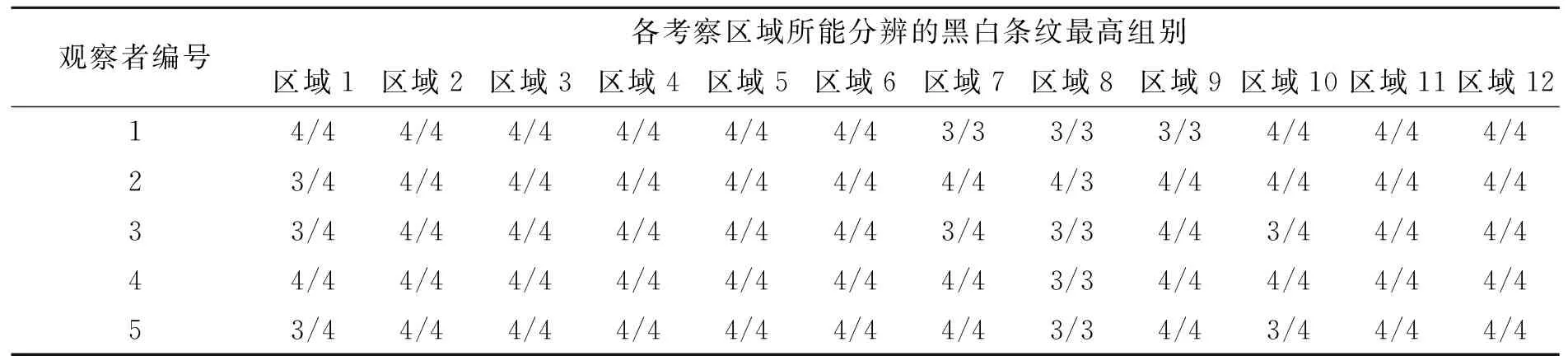
观察者编号各考察区域所能分辨的黑白条纹最高组别区域1区域2区域3区域4区域5区域6区域7区域8区域9区域10区域11区域1214/44/44/44/44/44/43/33/33/34/44/44/423/44/44/44/44/44/44/44/34/44/44/44/433/44/44/44/44/44/43/43/34/43/44/44/444/44/44/44/44/44/44/43/34/44/44/44/453/44/44/44/44/44/44/43/34/43/44/44/4
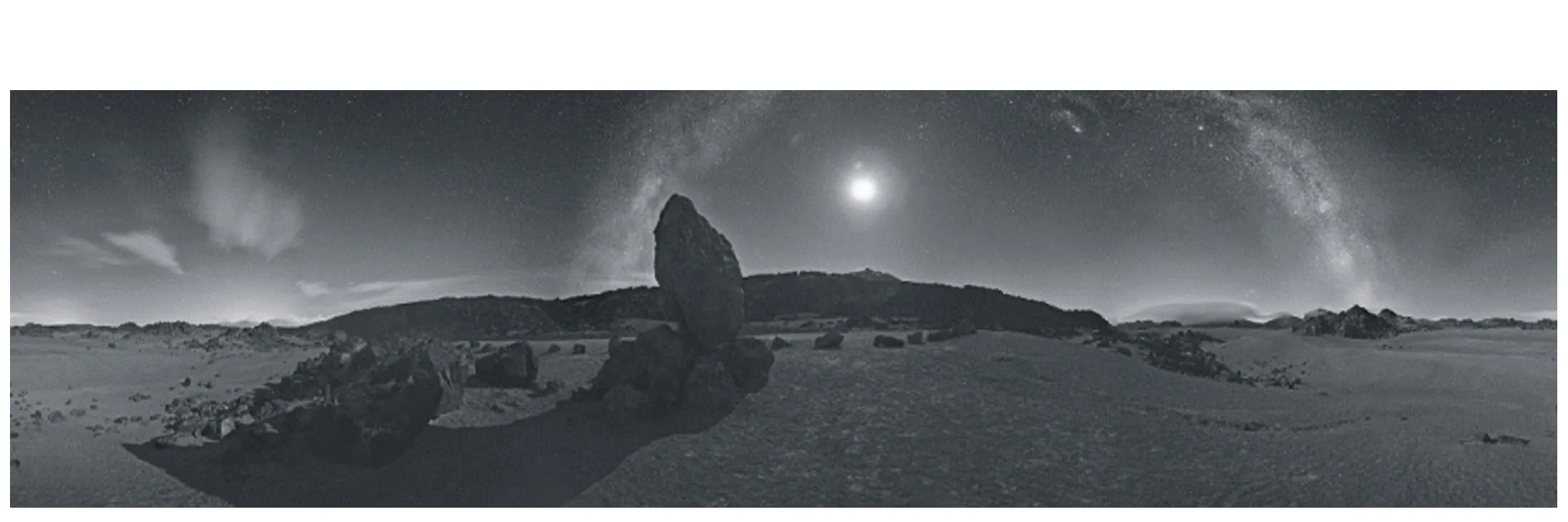
图15 测试原图 Fig.15 Original test image
3.2.3 全景图像的显示效果
采用图15所示2 400×600像素的256级灰度全景图像作为测试图,观察由OLED微显示器压缩变形显示的全景效果图如图16(a)所示,经过变形目镜光学解压缩后最终得到的全景效果图如图16(b)所示。可以看出:全景图像显示实验系统有效完成了对全景图像的压缩显示以及光学解压缩处理,变形目镜的分辨力可达到OLED微显示器的亚像素级别,能够分辨两个像素尺寸,且人眼观察效果良好。
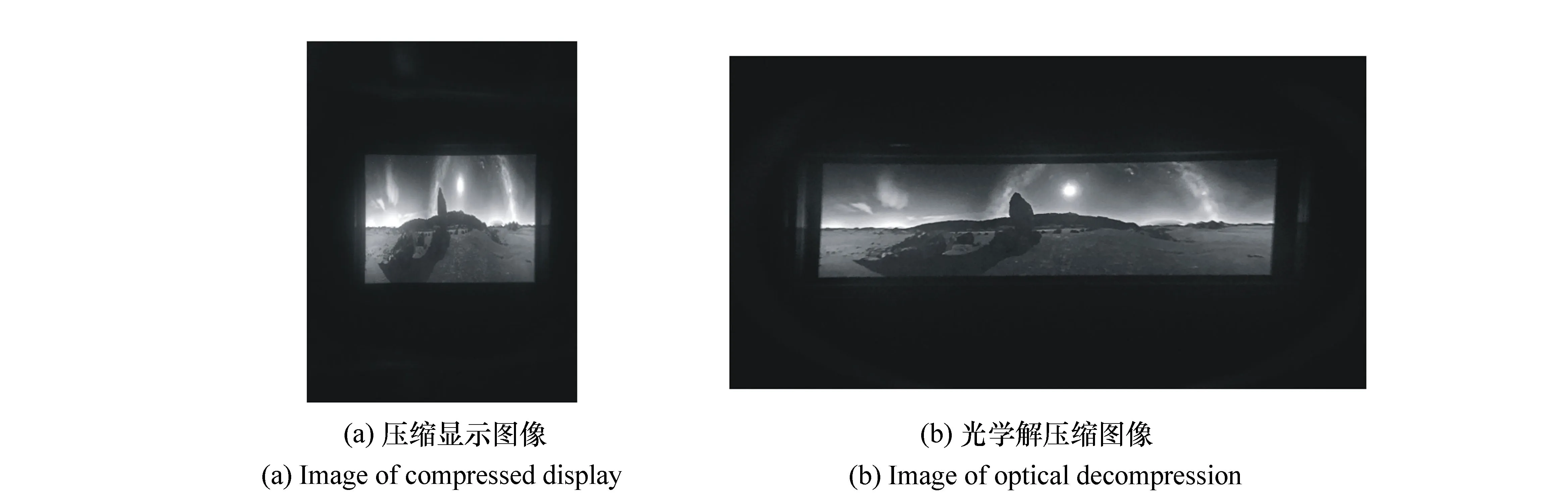
图16 OLED微显示器和变形目镜分别呈现的图像 Fig.16 OLED micro-display image and anamorphic eyepiece optical image
4 结 论
随着全景成像技术的兴起和不断发展,在全景图像的显示方面却依然存在着诸多限制。本文提出了一种基于变形目镜实现单一OLED微显示器的全景图像显示方法,并研制了一套基于OLED微显示器+变形目镜的全景图像显示实验系统,系统以FPGA开发板作为图像处理模块,将OLED微显示器的子像素作为显示像素进行驱动信号重编码,实现全景灰度图像在水平方向3倍压缩显示;利用变形目镜将OLED微显示器上显示的压缩图像进行水平3倍于垂直的变形放大显示,提供人眼正常观察的全景图像。通过实验系统的实际测试,实现了预期全景图像的显示效果,虽然变形目镜没有达到全景显示器的单像素分辨力显示,但大部分显示区域均实现双像素靶标(水平方向相当于亚像素显示)显示,最终验证了本文全景显示方法的可行性。若采用更高分辨率的SXGA(1 280×1 024)OLED微显示器,可望获得更高分辨力的全景显示或将屏幕分成上下两块显示区域,并增加摄像机数量可望实现周视场景高分辨图像的同步有效显示。本文的方法所提供的宽视场灰度全景显示思路在夜间侦察、驾驶、监控等领域具有广泛的应用前景。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
学苑创造·C版(2022年6期)2022-06-20
红外技术(2022年4期)2022-04-25
科学技术创新(2021年25期)2021-09-11
科学导报·学术(2020年19期)2020-07-09
中国医学装备(2020年4期)2020-05-23
摄影之友(2019年3期)2019-03-22
中国医学装备(2019年1期)2019-02-14
中国医疗设备(2019年1期)2019-01-15
中国光学(2015年5期)2015-12-09
