
国外大型无人水下航行器发展综述
2018-09-03 08:40钟宏伟李国良宋林桦莫春军
水下无人系统学报 2018年4期
钟宏伟 , 李国良 , 宋林桦, 莫春军
国外大型无人水下航行器发展综述
钟宏伟1, 李国良2, 宋林桦1, 莫春军1
(1. 中国船舶重工集团公司 第705研究所昆明分部, 云南 昆明, 650118; 2. 中国人解放军 91388部队, 广东 湛江, 524022)
当今无人水下航行器(UUV)已成为世界各国海军争相研制的“热点”装备, 并纷纷致力于大型UUV的研发。文中通过对大量文献的分析, 梳理了美国、俄罗斯、英国及德国等主要海军国家有代表性的大型UUV的发展现状和技术特征, 重点介绍了美国主要大型UUV装备的研究进展、应用情况及重要技术指标, 展望了大型UUV在动力、多任务、自主性、导航及有效载荷能力方面的发展趋势。
大型无人水下航行器; 水下装备; 技术指标
0 引言
上世纪90年代, 美国制定了无人航行器科学技术的全面发展计划。在2002年“21世纪海上力量”战略新构想中, 提出由深海向适应浅海与近岸作战的战略转变, 计划在2030年前组建一支约2 000艘由不同级别航行器组成的无人水下舰队, 主要用于浅海、近岸及港口的对敌情报搜集与侦察监视、反潜战与反水雷战作战, 以满足近海和港口等地的国土防卫和反恐需求[1]。大型无人水下航行器(large displacement unmanned un- dersea vehicle, LDUUV)的提出, 最初是基于近程水雷侦察系统(near mine reconnaissance system, NMRS)及远程水雷侦察系统(longterm mine reco- nnaissance system, LMRS)等研制计划。通过对美军各版本的无人航行器发展规划及海军无人系统发展路线图[2-5]解读不难发现, 美军已将大型UUV装备设定为一种未来水下无人作战平台。为尽量减少作战中的人员伤亡, 之后又提出将水下有人特种作战输送艇与大型UUV组合为一种水下力量作战平台。
当今世界各国在大型UUV的装备方面均有一定发展, 其中美国在此领域的发展最为迅速, 其发展重点针对满足大型UUV功能需求的各种先进技术的研发, 已研制多型大型UUV原理样机。另外, 俄、英、德、意也在开展各自的大型UUV原理样机的研制, 甚至伊朗也在积极研制此类无人装备。UUV的大型化发展已成为水下武器装备研发的必然趋势。
1 大型无人水下航行器发展现状
大型UUV的装备内涵为: 一种为水下小型无人集群提供停靠补给、环境评估、平台发射的水下作战部署系统, 搭载有各类武器及任务载荷舱段, 排水量大于5 t以上的水下无人平台[6]。它具有察打一体、有效载荷输送(含特种作战人员)、导航定位、保障与支援、海上设备投送、航行器间通信联系的基地“母艇”能力, 是一种有自主航行、可回收及自我保护功能的水下作战平台。
1.1 美国
美海军在2016年发布《AUV 2025年需求》[7]提出要加强对大型UUV的使用, 尤其强调对所研制的“曼塔”(MANTA)和“创新型海军原理样机(innovative naval prototype, INP)”等大型UUV的快速利用。2013年提出发展新型超大型UUV设计概念[8]。2015年向工业部门发布了大型水下无人系统工程研发阶段招标说明书(registered financial planner, RFP)[9]。2016年修改了大型无人航行器的采购方案[10]。2017年发布《恢复美国制海权》报告[11], 要求美海军未来装备超大型与智能型UUV, 将其作为一种多任务、多功能, 并能携带多种有效载荷的水下作战平台, 可作为水下特种作战、分布式网络、全球打击等有效载荷的UUV, 同时签署合同, 投巨资设计建造超大型UUV。
在整个大型UUV的研发过程中, 美海军先后提出了“曼塔计划”、在研的“水螅计划”以及“爪子计划”3个项目。最具代表的典型装备有“曼塔”、“海神”、“回声旅行者”等。随着水下作战概念的不断创新, 这种既可作为无人水下攻击平台, 又可作为水下有效载荷搭载平台的大型UUV还将会向概念更新、遂行功能任务更多的需求发展。
1.1.1 攻击型“曼塔”
美军2002年宣布推出的MANTA计划水下作战平台是建立在其研制的跨介质无人航空器上, 当时借用了空中无人机MANTA概念, 后将此概念延伸到水下无人机作战[12-14]。
MANTA采用模块化设计, 可搭载鱼雷、导弹、水雷等多种武器, 根据不同任务随时改变其配置的有效载荷。其外形如图1所示。

图1 “曼塔”海上试验
MANTA最初的设计指标是: 每艘排水量达50 t量级, 携带有4枚重型鱼雷及发射装置、融合了最先进的传感器水下技术、压电陶瓷发射机、高耐压水听器、高密度多通道记录仪、艇载电子设备和先进的处理算法; 航速在4.5~10 kn, 具有高精度导航、水声通信和无线电通信、低速航行能力; 通过携带的侧扫声呐使之具备可探测海底地形、地貌、深度、水雷和避障能力, 可向母艇提供水下作战环境的诸多情报信息。
MANTA平时与潜艇共形, 安装在艇艏, 潜艇可直接利用它作为执行任务的武器和传感器。战时, MANTA根据指令离开潜艇外壳坞站独立执行作战任务, 任务完成后返回母艇外壳坞站形成原来设计的的流线型外壳。
MANTA可有效发射鱼雷等重型武器(鱼雷、导弹), 并在浅海水域向敌进行水下攻击, 可承担多种水下任务, 目前已试列装美海军第五舰队[15]。2011年起, 美海军每年举行以“骄傲曼塔”命名的军演, 持续测试该装备在具体实战中的性能及能力。
由美海军水下战中心纽波特分部上世纪90年代晚期开发的MANTA, 自完成原理样机研究后, 目前没有更进一步研究的报道, 仅把它作为一个再开发可投入战场领域, 可直接支持未来海军大、中、小型UUV进行自主式及可搭载各类传感器和能源的技术研发试验载体。目前该装备相关技术处于平稳发展期[15], 美军已将该项装备技术输出到日本、韩国及以色列等国, 美军想通过与这些国家从事该项研究的技术人员的共同研究探索, 把一些最先进的技术理念和方法引入下一代MANTA的设计思想中。
1.1.2 潜艇大缩比设计测试模拟器
目前最大排水量的UUV是美海军水下战中心(naval surface warfare center, NSWC)用于声学测试的潜艇缩比模型, NSWC的声学研究团队现有3型这样的大型航行器又称轻型水下打击艇(light st- rike vehicle, LSV)[16]。
1) 一型是Unisys公司1987年交付的Cutth- roat UUV(LSV1), 主要用于测试与“海狼”级潜艇相关的多种技术概念。
2) 另一型是通用动力电船公司携手诺斯罗普格鲁曼纽波特船厂建造的Kokanee UUV, 它采用Cutthroat(LSV1)基础设计, 外形是“弗吉尼亚”级潜艇1:4缩比模型, 排水量155 t, 长30 m, 改进后延长到33 m, 是世界上目前最大的UUV, 已于2000年交付使用。这种按大缩比制成的模拟潜艇级航行器可按全工况航速工作, 以便准确采集和分析模型的辐射噪声, LSV1已助“海狼”级潜艇在全高速航行下解决所能达到的最佳隐蔽特性。经测试, Kokanee UUV选用原先为Cutthroat UUV研发的无轴推进器, 其不仅满足了“海狼”级潜艇的安静性要求, 更扩展了该类航行器在能力设计方面的开发, 使其具有更好的费效比。
3) 新一代Cutthroat UUV(LSV2)是一型按“弗吉尼亚”级潜艇1:3缩比做成的专门测试电池供电的潜艇模拟器, 可装载1 680块2 V铅酸电池和1台永磁同步变频6相推进电机, 电机推进功率达4 410 kW(但目前配置仅为一半), 耐压外壳采用HY 100钢, 排水量达196 t。
上述3型大缩比UUV作为进行测试与评估潜艇总体、推进器的噪声模型, 可使这一尺度模型在水动力学和水声学测试处于更为真实的工作环境, 以便在接近实际的状态下开展结构声学、振动、操控和能源系统的技术研究, 同时LSV航行器上储存的数据可在任务结束后下载分析。
1.1.3 大直径创新型原理样机
2015年, 美海军在“海空天博览会”宣布: 美海军研究局(office of naval research , ONR)研制的的大直径海军创新型原理样机(large displacement unmanned underwater vehicle innovative naval prototype, LDUUV-INP)可改变海军作战的游戏规则, 是大型UUV搭载平台的2.0版。同年, 美海军海上系统司令部通过大型UUV项目低风险评审。2016年, ONR通过900~ 1 100 n mile长航时试验, 解决了大型UUV在长期自主水下作业、传感器实现安全自主导航时存在的技术问题; 完成了对其集成系统及传感器在水下长期持久作业的考核、以及对有效载荷集成新型航行器的可行性分析; 进行了对微小型有效载荷与航行器平台的接口试验。2017年, 为使项目样机尽快投入使用, 完成了对大型UUV采购策略的调整。2018年3月, 美海军计划分2个阶段实现样机的快速采购策略, 在2019财年交付2台样机, 用于评估关键系统的性能和技术特点, 支撑作战概念的论证; 在2022财年交付2台样机, 用于整体的性能与技术评估, 之后再系统集成到舰艇或潜艇上。计划到2020年首批样机可部署无人系统中队执行任务。2025年前将达到全速生产[10,14]。图2为LDUUV-INP原理样机。

图2 美海军大直径创新型无人水下航行器原理样机
LDUUV-INP要求具有可搭载不同传感器和任务模块、自主控制能力强、可灵活搭载有效载荷、可数月远距离执行任务的能力; 具有扫雷、跟踪、情报侦察、自主工作及智能化攻击的能力; 可搭载各种类型的导弹、炸弹、甚至核弹进行自主攻击; 既可独立使用, 也可在包括巡航导弹核潜艇、弗吉尼亚级攻击核潜艇和水面舰艇等多种平台上部署。LDUUV-INP直径约1.5 m(截面为正方型), 以燃料电池作为能源, 能极大提高续航能力; 为降低应用成本, 采用可任务重构的有效载荷模块化技术; 能够集成用于水雷清除和潜艇
跟踪的小型UUV。
LDUUV-INP有3种布放方式可供选择, 分别为经过改装的“俄亥俄”级潜艇的导弹发射管、攻击型核潜艇加装的干式遮蔽舱以及“弗吉尼亚”级潜艇改装的艇艏导弹发射管。目前美国海军更倾向于最后一种方案。该UUV可续航30天, 未来将有更长续航时间, 可在水下数月或数年进行作业, 并可根据任务需求, 从“弗吉尼亚”级潜艇的武器载荷舱、近海战斗舰或干船坞进行布放。该UUV主要用于执行从水下侦查到反水雷的各种任务, 通过对航行器进行最优技术配置, 具备自主规避水下障碍(如山丘、渔网等)能力, 可与传感器、有效载荷与水下航行器间进行高速传输导航数据, 并与水下大数据中心网进行数据传输。
1.1.4 双模式“海神”UUV
2015年, 美国亨廷顿·英格尔斯工业集团、巴特尔公司及蓝鳍机器人公司共同组成水下研发团队推出多模式“海神(Proteus)”大型UUV, 开创了有人/无人通用平台应用先例, 兼具前沿海域微小型自主UUV能源补给基地、大型蛙人输送艇及有效载荷水下搭载试验平台等多种功能[17]。该UUV采用扁平柱体外形、湿式结构、电动力驱动设计, 长7.87 m, 宽1.6 m, 高1.62 m, 重3.74 t, 外壳材料为玻璃纤维, 最大潜深45.72 m, 持久力(正常荷载)50 h, 最高航速10 kn, 巡航速度8 kn。其两侧携带有黑色圆柱体, 无人模式下, 航行器双边各携带750 kg载荷可航行350~700 n mile, 最远航程若维持4 kn航速时可实现航程超过900 n mile(296 kWh电池)最大化; 有人模式下, 航行器上配备的生命支持系统可供6名蛙人使用8 h, 移植了原哥伦比亚集团工程部与蓝鳍公司共同研发的“海神”有人/无人航行器技术。
这型双模式大型UUV融入了有人与无人操控的设计概念, 研发团队把研制UUV和海豹特战作战输送艇(见图3)获得的经验利用起来, 以期开发具备充足能源、长距离运送有效载荷、长期水下持久力的新一代大型UUV。该UUV可同时搭载用于布雷与攻击的有关武器, 能携带其他可快速执行任务的小型UUV, 必要时可作为水下前沿作战的补给母艇, 不足为: 如航渡速度很低, 最高航速小于10 kn, 在充电后只能航行345 n mile, 且电池充电时间比耗尽电量时间要长很多, 不能很好满足战时迅速到位港口或入海口处的军事需求。
该装备于2012年研发, 已通过海军研究实验室、海军水面战中心、海军特种作战司令部、空间和作战系统司令部等部门评估, 完成近百次功能测试, 水下航行记录大于400 h, 已做好入役准备。2017年已移交给海军作为专门的官方试验平台; 2018年2月, 该UUV在NSWC支持下完成了海上试验, 接下来准备参与美国海军研究实验室和美国国土安全部(department of homeland security, DHS)组织的联合演习。每套价格依据传感器不同而有所区别, 预计在1000~1200万美元之间[18]。
1.1.5 反潜训练靶“MASTT”
图4所示UUV为美国水下海事公司目前建造的60 t级重的移动式反潜战训练靶(modular, adaptive, stimulator for training & test, MASTT), 它的基本设计概念是把反潜战训练靶的基础载荷(基本系统)做成货架式的模块化结构, 以便组装及拆卸, 可随时模拟各类潜艇目标性能参数, 因采用UUV设计理念, 仅花费1年时间便设计和建造出具有高费效比、低维护成本的航行器。美国水下海事公司是一家专门设计和建造商用旅游者用潜水器的生产厂家, 能提供高压容器、电池系统、不依赖空气推进(air independance power,系统、开式和闭式呼吸系统以及生命支持系统的设计与制造, 可根据用户需求, 快速将这些专业系统配置到水下有人/无人水下艇或装备上, 使之形成可任务重构的水下装备[16], 这是MASTT快速获得订单合同的主要原因。
1.1.6 “水螅”基地型UUV
2013年, 美国国防高级研究计划局(defense advanced research projects agency, DARPA) 正式发布“水螅计划”项目招标公告(又称蛇头计划), 旨在开发一种战场上隐蔽运输并部署小型无人机和UUV的大型UUV(参见图5)[9]。

图4 重60 t的移动式反潜战训练靶
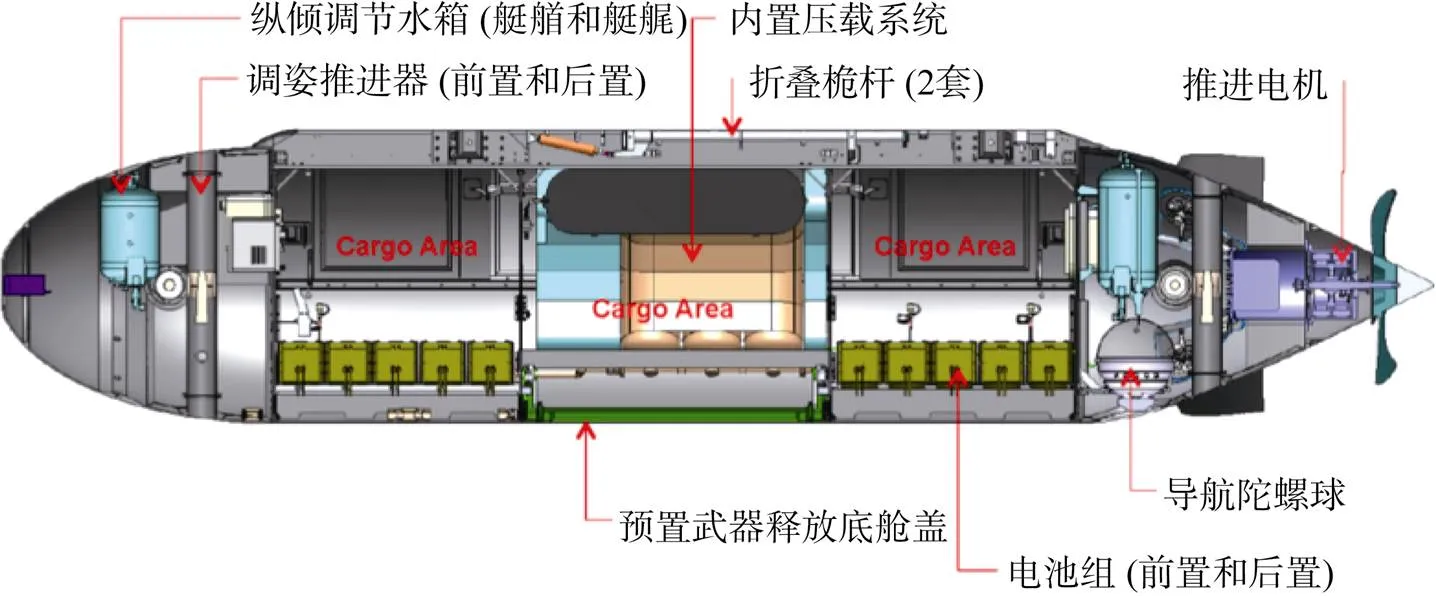
图5 “水螅”基地型UUV内部结构图
“水螅”基地型UUV计划采用开放式标准模块化技术, 使母艇具有可扩展性和低成本, 能够根据海军作战要求进行快速反应, 模块化载荷舱段组合使航行器快速具备诸如情报、监视和侦察(intelligence surveillance and reconaissance, ISR), 反水雷(mine counter measures, MCM)等能力, 预计2018年前可实现实战功能演示。另外, DARPA还为该项目寻求关于大型航行器模块化外壳、无人机载荷、UUV水下载荷、总体系统概念及支持技术等5个技术领域的创新项目建议。
2015年, 美海军海洋系统部向工业部门发布关于“水螅”大型水下无人系统工程研发阶段的RFP, 提出尽量利用早期开发的原理样机作为搭载有效载荷的修改方案, 将前期海军其他项目所研发的技术进行搭载演示验证, 以支持这种修改方案的实施。要求“水螅”计划中研发的超大型UUV需共享共用组件, 如指挥和控制(C2)系统、集成有效载荷的各种接口, 以及如续航力、自主性等核心技术。具体内容包括以下几方面[9]。
1) 模块化外壳
设计和开发一种模块化的外壳以容纳“水螅”相关载荷。模块化外壳能提供运输、储存和发射不同种类载荷, 作为各种功能载荷的“任务卡车”, 这种“卡车”可支持基础负载模块和独立负载模块的服务。模块化外壳要求可长期在浅水水域工作, 其内部组件也是模块化设计, 可任务重构, 快速集成多种载荷类型, 新集成载荷模块可最大化利用空间。基于任务和适应不同任务载荷模块标准接口可相互支持或扩展。
2) 无人机载荷
无人机载荷设想是将无人机单独封装入一个内部模块, 将该模块装进“水螅”标准模块化外壳内, 无人机载荷依靠“水螅”模块化外壳作为可靠的水下发射平台, 当装有无人机的内部模块处在潜航状态或浮在海面上时可储存、维护、处理各种通信数据, 并接受外界信号的激励, 释放封入内部模块的无人机。发射过程要求无人机载荷内部模块从模块化外壳中弹出, 内部模块上浮到海面, 依靠该模块发射无人机, 飞行一段距离后操控无人机执行一个或多个事先秘密制定的任务。
3) UUV水下载荷
UUV水下载荷包括装入UUV标准模块化外壳内的置有小型UUV的水下载荷模块, 可完成小型UUV的安全运输、提供水下长航时能源、对能源进行有效转换、接收与发送各种信息、发射和回收小型的“水螅”母艇平台。
UUV模块化外壳能够提供可靠的水下平台、通信和浮力。水下载荷关键组件包括不依赖空气的动力能源; 为水下航行器充电的设施; 可发射与回收的小型UUV; 可下载UUV收集数据, 并通过模块化外壳向指挥控制中心传输数据的信息处理系统。
4) 总体系统概念
“水螅”系统总体设计概念或结构包括: 开发使用潜艇或作战飞机部署和回收“水螅”航行器的创新概念; 研究将指挥、控制和通信系统最有可能集成到现有综合作战管理系统的首选方案及措施; 评估“水螅”系统的空中、水下有效载荷以及其他可选用功能载荷的影响。
5) 支持技术
探索用于“水螅”概念的各种支持技术, 研究突破一个或多个关键技术, 降低该项目风险, 开发概念型演示验证样机以及UUV执行任务所需能源储备的高效充电方法演示验证。
该项目计划在设计和技术验证阶段耗时18个月, 集成和组件论证阶段耗时24个月, 演示验证阶段耗时12个月。
1.1.7 “回声旅行者”超大型UUV
2017年, 美国波音公司发布公告, 其研发的长15.5 m “回声旅行者”(echo voyager)UUV进行初次海上试验, 以检测其深水潜航持久力, 并重点对通信系统、自主控制系统、推进系统、系统集成性能以及航行器在水面和水下状态中的电池运行性能进行了检测[19](见图6)。该UUV长15.5 m, 为“回声”家族最大型, 最高时速可达14.8 km/h, 作业深度为3 000m。即将进行的布拉沃(Bravo)海试将验证该航行器总体性能特征及各子系统性能的先进性。波音公司已确定将“回声旅行者”作为验证改进及整合各种有效载荷方案, 以及未来新功能运用的高级测试平台和产品制造的标准。

图6 “回声旅行者”超大型UUV及通气管桅杆
“回声航行者”上装有一个可折叠桅杆, 上面集成了自动识别海上船只的自适应信息系统(adaptive information system, AIS)及一根通气管, 具有卫星通信和军用卫星通信的能力。当UUV浸没水下时, 桅杆放倒与UUV外壳共形; 当浮至水面时, 桅杆升至4.8 m, 并有约2.4 m露出水面。除具有AIS和通信能力外, 桅杆还作为柴油发电机提供新鲜空气的通气管, 可为航行器电池进行充电。当电池充电、数据下载完成后, 桅杆收回到水下UUV的共形空间, 继续执行其他任务。
该航行器动力系统采用成熟商用货架产品锂基电池供电, 安全可靠, 在水下全工况用电状态下可维持2~3天, 无需上浮水面充电。正常航速下, 一次电池充电的航渡距离约为280 km。一旦新型电池装备, 将具备更长的水下巡航时间。目前在单燃料模式下具有12 038 km(6 500 mile)的航程。如果改变其有效载荷空间作为燃料储罐, 续航力可翻倍, 轻松运行90~180天。如果执行任务期间要求航行器静默, 可投放锚锭使其坐沉海底, 以实现在水下长时间预置。
该UUV上装有成熟度很高的自主软件, 可保证水下作业安全, 感知前方物体并做出规避。其有效载荷空间为56.63 m3(长10.3 m, 宽2.6 m)。
1.1.8 “虎鲸”超大型UUV
2013年, 在德国举行的水下防务展(under- water defence technology, UDT)上, 美国洛克希德·马丁公司公布了其最新研发的排水量160 t级超大型UUV设计方案, 该航行器航程为6 000 n mile、采用混合动力、可携带鱼雷和导弹等重型武器模块系统攻击目标, 并可作为特种作战输送艇使用(见图7)[19]。

图7 “虎鲸”超大型UUV
“虎鲸”UUV最初的设计思想是, 为确保潜艇主战平台的安全, 将所需各类传感器、电池组及自主性系统打包集成到一个533 mm或650 mm口径大小的UUV上。设计过程中因发现所需成本已远超预期, 且集成后各系统功能表现不佳, 随即放弃该方案。现采用的方案是: 利用洛·马公司多年研发一系列廉价无人水下或半潜式水下航行器积累的经验, 通过平衡有人与UUV的总体设计, 解决研制及试验中各种矛盾因素, 提出了既可用作反潜战训练、水雷战及ISR作战使用, 又可最大程度使用现有成熟商用技术, 以期达到最佳费效比。
“虎鲸”UUV长24 m, 直径为2.5 m, 重量约63 t, 航速最大10 kn。续航力的大小取决于所用能源, 若采用化学能电池, 以7.5 kn航速可航行500 n mile; 若柴电混合动力, 在10~12个充电周期内, 累积航程约5 000~ 6 000 n mile。
“虎鲸”UUV集成有7大任务包模块: 60枚潜舰导弹、2艘“马林”UUV、96或72单元水听阵列、16枚轻重型鱼雷、坐底机动载荷模块、猎扫雷模块及水下网通信模块。因其强大的武器储备及攻击能力, 该UUV又被称为水下机动无人武器库。
由于可快速增强舰队实力、具有良好容错性且价格合理, 在海上执行战术采购和部署方面, 该研制方案将节省大量成本。基于此, 这些新型航行器可作为战区可扩展资源, 大大增强在敌占海域执行反潜与ISR作战实力, 真正成为一种海上力量倍增器。
2017年9月, 美国海军向洛克希德·马丁拨款4 320万美元用于开展第1阶段为期15个月的研发工作。2018年3月, 对初步设计进行评审, 10月将进行关键设计评审, 最终合同计划于2019年签署。“虎鲸”UUV最初是作为一种联合紧急作战需求(joint emergency operation need, JEON)提出, 后被作战司令部认为是最迫切的一种基本装备, 2017年12月, DARPA与应用物理科学公司(Ame- rican physical society, APS)和诺斯罗普·格鲁曼公司共同签署了关于装备“虎鲸”超大型UUV“机动有效载荷舱”原理开发设计合同。
1.2 俄罗斯
1.2.1 “比拉鱼(Piranha)”“迷你”超大型UUV
2013年, 俄罗斯联合造船公司表示正在研发865计划中的“比拉鱼(Piranha)”“迷你”超大型UUV(也称微型潜艇)[8]。这是俄罗斯第1次宣布开发有人/无人共享UUV。当前, 美、俄都有将超大型UUV与微型潜艇合并作为一种有人/无人水下作战平台的趋势。
该UUV用于特种作战, 维护成本极低。其技术参数: 长45 m, 直径2.31 m, 潜深100 m, 续航时间10天(AIP系统), 航程130 n mile(4 kn), 最多达1 000 n mile, 最大航速6.5 kn, 可搭载人数17人, 装备主/被动声呐, 携带多枚鱼雷和水雷, 壳体材料采用钛合金。
2016年, 俄罗斯宣布“红宝石”设计局和“孔雀石”设计局开始为第5代“赫斯基”级核潜艇研发可从艇上投放的UUV。新艇形的设计应满足可携带UUV执行各类任务的要求, 且UUV可搭载不同功能载荷的仪器, 以实现对水下环境的监测, 并能搭载鱼雷等武器, 以实施水下对敌攻击。
1.2.2 “替代者”超大型UUV
2017年, 俄罗斯红宝石设计局宣布其研制成功用于模拟替代人操潜艇的“替代者”超大型UUV(见图8)。

图8 带拖曳式阵列天线的“替代者”超大型UUV
该UUV排水量60 t, 长约17 m, 可以5 kn航速(约9 km/h)航行600英里(约合960 km), 最大航速达24 kn。按此推算, 其可持续进行15~16 h的续航训练力, 并具有高速机动及模拟敌方潜艇的能力[10]。因其体型较大, 可携带拖曳式声呐阵列天线, 不仅可用于反潜训练, 还可用于开发和测试新的声呐系统、探测设备以及鱼雷、潜艇等武器装备, 可有效降低潜艇的研制成本和风险。
1.2.3 “波塞冬”超大型UUV
2018年5月, 俄宣布“波塞冬”核动力UUV被列入2027年前的国家武装计划, 它由北方机械制造厂建造, 其核动力装置已通过测试。该航行器直径1.6 m, 长度>25 m, 可携带>1.5 t的载荷, 在1000 m以下深水高速前行, 最高航速可达56 kn, 隐蔽航行超过10 000海里。导航系统可自动导引其高速驶向目标, 并在敌方附近水域完成各种任务。这种核动力UUV将完全改变现有战略核武器的攻击模式[20]。
1.2.4 “大琴键”大型UUV
2018年5月, 俄海军宣布对其第2代大型UUV “大琴键-2”进行海试, 并已移交黑海舰队特种试验船进行试验。相较于第1代“大琴键-1”外形酷似鱼雷, “大琴键-2”的尺寸和重量更大, 更像一艘小潜艇[20]。其长约7 m, 直径1 m, 重量为4 t, 顶部有小的凸起部分, 下潜深度可达6 000 m, 可搭载更多先进装备, 可能由949AM改进型核潜艇“贝尔戈罗德”号和改装成特种用途核潜艇的“莫斯科郊外”号挂载。
1.3 英国
英国MSubs公司生产的MASTT 超大型UUV(见图9)具备无可匹敌的无人作业能力, 是目前世界上最大型的UUV[9]。

图9 MSubs公司生产的超大型UUV
MASTT的指挥、控制和任务管理(command control manufacture management, CCMM)系统均采用通用的、功能强悍的模块化结构, 以适应各独立航行器的配置。这是一种可按设计概念, 将开发好的实用化无人系统灵活集成的水下平台, 可作为支持海底油气工业的创新处理设备。其主要性能参数为: 长18.85 m; 直径2.75 m; 潜深100 m; 航程1250 n mile(仅作蛙人运送11人), 2500~3000 n mile(带侦察蛙人7人); 外挂2枚“虎鱼”重型鱼雷, 6枚“鯆鱼”轻型鱼雷, 14枚“石鱼”水雷, 或2艘小型蛙人运载器(swimming delivery vehicle, SDV)有效载荷; 内部可搭载10名蛙人; 航行器外壳体为钛合金。
MASTT 近期已完成了组部件检查、非破坏性试验(non destructive testing, NDT)、压力容器和穿透压力测试, 未来将完成全系统验收试验, 并通过海上反潜测试。
1.4 德国
德国研发一种称作Orca的有人/无人大型UUV, 长12 m、直径2 m, 可航行150 n mile, 航速大于5 kn, 排水量28 t, 可搭载5名特种作战队员及300 kg有效载荷, 采用自主+人工操纵航行, 由4个模块构成, 推进效率高, 便于维护, 外壳采用非磁性钢材料, 可作蛙人运载器或无人航行器平台[10]。
1.5 意大利
MG120/ER大型UUV可外挂2枚小型鱼雷, 或2具小型蛙人运载器, 或12枚水雷或8套潜水套件, 适合浅水或狭窄水道作战, 噪音低, 装有六角形天线, 能360°侦测敌方雷达波, 发出早期警报。采用非金属材料作为壳体, 以降低噪声和防腐蚀性, 可携带8名作战蛙人[10]。
2 大型UUV装备发展趋势
目前, 美海军大型UUV装备发展不断推陈出新, 从最早的“海马”、“曼塔”攻击型UUV到“水螅”、有人/无人有效载荷特种作战输送艇、超大型UUV综合无人作战平台概念都体现了美军在大型UUV上的不断发展和创新。可以认为, UUV装备呈现出向更大型发展的趋势(口径从533/650 mm到2.5 m、长度从15 m到40 m、排水量从几吨到近200 t), 同时作战功能也向多样化发展, 通过更换有效载荷模块形式(如携带鱼雷、导弹、UUV、UAV或特种作战人员(特种作战载荷))来满足更多的战场需求。除美国外, 英国、德国、俄罗斯、意大利也在发展适合本国的大型UUV, 并出现了相应的装备型号。大型UUV一个最显著的发展特点就是采用了开放式模块化结构设计, 可实现UUV的任务重构, 从原先较为单一的任务功能变成能执行多种任务的功能型任务平台; 载荷数量大幅提升、攻击能力进一步得到加强(据资料可知, 美国已开始论证航行器同时携带4~6枚重型鱼雷/导弹, 60枚小型鱼雷、导弹、水雷、UUV的可行性)[8]。
综上所述, 大型UUV呈现如下发展趋势。
1) 向水面/水下两用混合动力型发展。“湿式”大型UUV将有更好的应用前景。它可在水面上高速航行接近目标, 后再转入水下潜航, 隐秘靠近目标, 速度快, 航程大, 蛙人可保持体力并随时出舱。若为进一步提高特种作战驾乘的舒适性, 可考虑融入“干式”结构。
2) 用途多样化。大型UUV不仅可用来输送有效载荷或执行特种作战任务的蛙人, 更将通过把有效载荷舱与作战蛙人运送舱有效结合, 以作为一种水下有人或无人的作战平台。具备水下临时组网定位、导航、发送信息节点、用所携带的小型武器(如微型鱼雷)对目标发起攻击等多种功能。
3) 向自主性高、导航能力强、负载能力大的综合作战平台发展。大型UUV的导航技术将把组合船位推算、惯导、声导、视导及地球物理导航综合起来形成系统, 使之更具自主性、功能性、智能性、低功耗性及高可靠性。
4) 技术水平持续提升。大型UUV装有AIP系统, 航程较大, 可攻击水下目标。采用模块设计, 可实现水下长航时连续作业和综合作战功能, 具有极强的侦察、攻击、报警、长续航能力, 智能化、机动性高。
5) 模块化。采用模块集成结构设计, 可对深度和航线路径进行预编程控制, 实现可自主也可人工操纵航行, 便于日常维护。利用标准模块化技术, 使大型UUV具有可扩展性和低成本, 能够根据海军作战要求做出快速反应。
3 结束语
始于21世纪的大型UUV研发随着关键技术的不断突破, 在美国已研制出多型装备, 并成为美海军在无人系统领域的发展重点。美国大型UUV的研发特点为: 为尽快完成大型UUV的采购入役, 美海军建立以军方为主的集成单位负责制, 通过改变采购规则, 将中、小型UUV上各种成熟的先进技术应用到大型UUV上, 使其成为无人体系作战能力的倍增器; 通过继续加大对大工业界有关领域的技术投资, 聚焦突破技术与支撑点, 近年积累了大量经验, 带动了基础技术的更大发展; 通过共用技术及关键技术采用模块化设计思想, 该类装备将随新技术的发展不断升级换代已成为未来UUV的一种发展趋势。
俄、德、英等国近年都在大力发展各自的大型UUV, 俄罗斯将重点放在核动力能源, 以解决长续航力受限之问题; 德、英将重点聚焦在探测与水下精确定位技术上。未来, 美国将在大型UUV装备和技术的发展基础上, 研发适应水下作战需求任务的无人系统, 探索以基地型为母艇的水下无人作战模式, 这将为水下作战和海上作战带来革命性的变化。
[1] United States Navy. The Navy Unmanned Undersea Vehicle Master Plan[R]. U.S.: Department of the Navy, 2004.
[2] United States Department of Defense. Unmanned Systems Roadmap FY2007-2032[R]. U.S.: United States Departm- ent of Defense, 2007.
[3] United States Department of Defense. Unmanned Systems Integrated Roadmap FY2009-2034[R]. U.S.: United States Department of Defense, 2009.
[4] United States Department of Defense. Unmanned Systems Integrated Roadmap FY2011-2036[R]. U.S.: United States Department of Defense, 2011.
[5] United States Department of Defense. Unmanned Systems Integrated Roadmap FY2013-2038[R]. U.S.: United Sta- tes Department of Defense, 2013.
[6] 陈强. 水下无人航行器[M]. 北京: 国防工业出版社, 2014.
[7] United States Navy. Autonomous Undersea Vehicle Req- uirement for 2025[R]. U.S.: United States Department of Defense, 2016.
[8] William S, Lockheed M, Brett Phaneuf, et al. Extremely Large Unmanned Underwater Vehicles(ELUUV) as Force Multiplier(7C/7C.2)[C]//MAST Europe 2013. Germany: UDT, 2013.
[9] Department of the Navy. Large Displacement Unmanned Underwater Vehicle Innovative Naval Prototype Technology[R]. ONRBAA Announcement, 2015.
[10] 国外舰船装备与技术发展报告编写组. 国外舰船装备与技术发展报告2017: 海上无人系统(无人航行器)[G]. 北京: 中国船舶重工集团公司, 2018.
[11] Steven Stashwick. Restroring American Sea Power——New Fleet Structure of the US Navy[R]. US Strategic and Budget Assessment Center(CSBA), 2017.
[12] Lee S K, Sohn K H, Byun J Y, et al. Modeling and Con- troller Design of Manta-type Unmanned Underwater Test Vehicle[J]. Journal of Mechanical Science & Technology, 2009, 23(4): 987-990.
[13] Daniel Deitz. LDUUV INP Industry Day Large UUV Autonomy[EB/OL].(2007)[2018-06-13].Http://auvac.org/… / 734-LDUUV pdf.
[14] Office of Naval Researcher. Large Displacement Unman- ned Underwater Vehicle Innovative Naval Prototype(LDUUV- INP)[EB/OL]. (2015-04-13)[2018-06-13]. http://www. navaldrones.com/LDUUV-INP.html.
[15] 国外舰船装备与技术发展报告编写组. 国外舰船装备与技术发展报告2016: 海上无人系统(无人航行器)[G]. 北京: 中国船舶重工集团公司, 2017.
[16] 国外舰船装备与技术发展报告编写组. 国外舰船装备与技术发展报告2014: 海上无人系统(无人航行器)[G]. 北京: 中国船舶重工集团公司, 2015.
[17] Jeff Smith, Ross Lindman. Proteus-Large Diameter Undersea Vehicle And Its Applications For Undersea Warfare [EB/OL].(2012-5)[2018-06-13].http://www.10thsymposium.com.
[18] 国外舰船装备与技术发展报告编写组. 国外舰船装备与技术发展报告2017: 海上无人系统(无人航行器)[G]. 北京: 中国船舶重工集团公司, 2018.
[19] Defense Science Board. Next-Generation Unmanned Und- ersea Systems[R]. U.S.: Office of the Secretary of Def- ense, 2016.
[20] 施普森. 俄新一代无人水下装备将在克里米亚海军试验场[EB/OL]. (2018-05-06)[2018-06-13]. http://www. dsti.net/Information/News/109602.
(责任编辑: 杨力军)
Development of Large Displacement Unmanned Undersea Vehicle in Foreign Countries: a Review
ZHONG Hong-wei1, LI Guo-liang2, SONG Lin-hua1, MO Chun-jun1
(1. Kunming Branch of the 705 Research Institute, China Shipbuilding Industry Corporation, Kunming 650118, China, 2. 91388thUnit, The People’s Liberation Army of China, Zhanjiang 524022, China)
Today, unmanned undersea vehicle(UUV) has become a“hot spot”equipment for navies all over the world, and they are devoting more and more attention to the research and development of large displacement UUV(LDUUV). Through a great deal of literature analysis, this paper introduces the development status and technical characteristics of the representative LDUUVs in the United States, Russia, Britain and Germany, focusing on the research progress, application, and important technical specifications of the typical LDUUVs in the United States, and looks into the future development trend of LDUUVs in terms of power, multi-task, autonomy, navigation and payload capacity.
large displacement unmanned undersea vehicle(LDUUV); underwater equipment; technical specification
TJ630.1; TP242.6
A
2096-3920(2018)04-0273-10
10.11993/j.issn.2096-3920.2018.04.001
钟宏伟,李国良,宋林桦,等.国外大型无人水下航行器发展综述[J]. 水下无人系统学报, 2018, 26(4): 273-282.
2018-06-13;
2018-07-02.
钟宏伟(1964-), 男, 硕士, 高级工程师, 主要从事鱼雷及水下航行器前瞻性技术研究.
猜你喜欢
汽车实用技术(2022年11期)2022-06-20
军民两用技术与产品(2022年1期)2022-06-01
疯狂英语·新读写(2021年6期)2021-08-05
军民两用技术与产品(2021年12期)2021-03-09
儿童故事画报(2020年7期)2020-08-03
航天工业管理(2020年3期)2020-07-25
小学科学(2020年6期)2020-06-22
现代装饰(2020年5期)2020-05-30
太空探索(2020年5期)2020-05-19
汽车与新动力(2019年5期)2019-11-07
