
海洋核动力平台减摇方式研究
2018-09-02 11:08张乃樑
舰船科学技术 2018年8期
韩 冰,张乃樑,郭 健,郭 翔
(武汉第二船舶设计研究所,湖北 武汉 430064)
0 引 言
船舶在海上作业时,由于受到海浪、海风及海流等海洋环境扰动的作用,不可避免地产生6个自由度运动,即横摇、纵摇、首摇、横荡、纵荡和升沉。船舶摇摆会影响船上设备的正常工作,严重时还有可能损坏船上设备,此外过分摇摆也直接影响船员的工作效率及人身安全。海洋核动力平台作为一种新兴的海上发电设施,需要长期单点系泊于固定海域,属于典型的非自航式船舶,此外,由于搭载核动力装置,平台对减摇的要求更加严格。本文对海洋核动力平台减摇方式进行研究,通过分析平台的运行环境及运动性能,对平台的减摇需求进行论证,进而根据平台自身特点,对减摇装置进行筛选,并着重对减摇水舱及减摇陀螺方案进行了设计和论证,为该类问题的解决提供思路[1]。
1 海洋核动力平台运行环境及运动性能
对于船舶而言,是否需要减摇装置、需要哪种减摇装置并不能一概而论,而是需要根据设计要求,综合考虑船舶的作业海域条件及运动性能特征,对船舶的摇摆进行量化的分析,盲目地使用或取消减摇装置都会对船舶的安全性及经济性造成损害。
1.1 海洋核动力平台运行环境分析
海洋核动力平台设计作业海域为渤海海域,由于渤海风区小,灾害性海浪的发生频率也小,根据GJB4000-2000《舰船通用规范》可得各海况条件下对应的风浪数据,在设计过程中,假定海洋核动力平台设计作业的极限海况为7级海况,根据《西北太平洋波浪统计集(1961-1990)》统计数据得到渤海海域各海况的发生概率,如图1和表1所示。

图1 渤海海域波浪全年统计数据Fig. 1 The wave′s annual statistics of Bohai sea

表1 渤海海域各海况发生概率Tab. 1 The sea state′s probability of occurrence of Bohai sea
1.2 海洋核动力平台运动性能分析
船舶的运动性能与主尺度数据紧密关联,为使表述更加清晰,给出海洋核动力平台主尺度数据如表2所示。
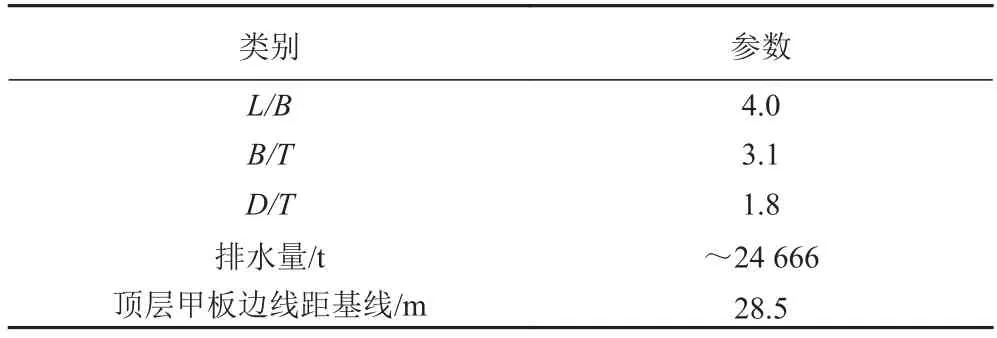
表2 海洋核动力平台主尺度数据Tab. 2 The principal dimensions of marine nuclear power plant
海洋核动力平台由于长期单点系泊于渤海海域,为保证人员和设备的安全性,需要考虑海洋核动力平台所有可能存在的运动状态,尤其需要关注最危险的运动状态。对于海洋核动力平台运动状态的分析,采用三维势流方法结合作业海域的海浪谱分析,现对海洋核动力平台迎浪以及横浪状态进行分析,数值预报效果如图2所示,通过数值计算得到各海况下摇摆角如表3所示。
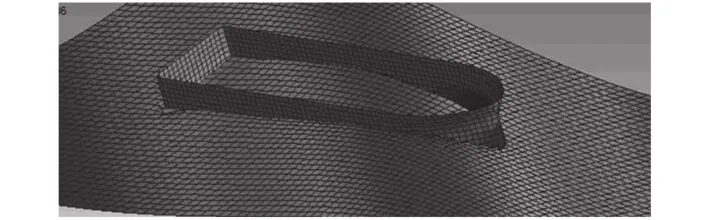
图2 海洋核动力平台耐波性数值预报效果图Fig. 2 The rendering of wave resistance′s numerical prediction of marine nuclear power plant
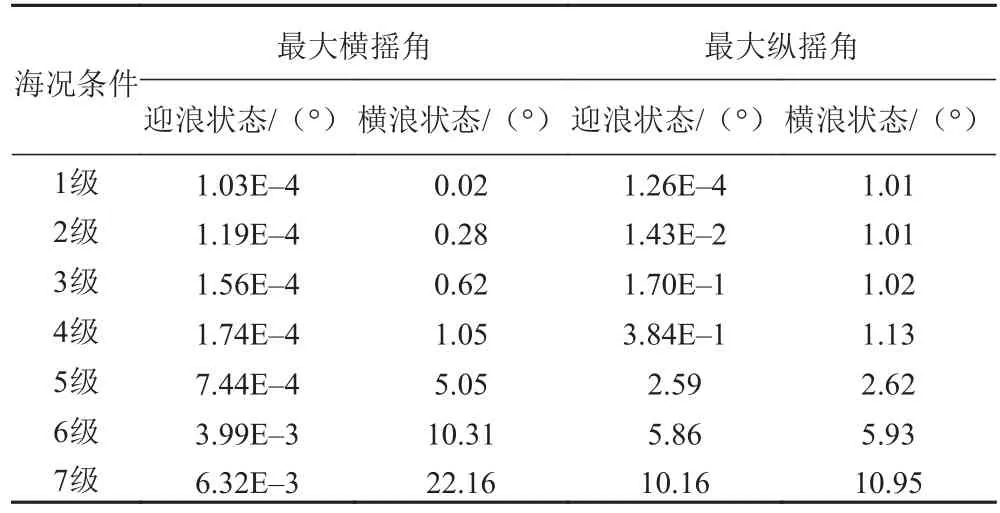
表3 海洋核动力平台各海况下摇摆角Tab. 3 The various sea state’s swing angle of marine nuclear power plant
1.3 人员设备对海洋核动力平台摇摆的要求
1.3.1 人员对海洋核动力平台摇摆的要求
人员对于船舶摇摆的要求一般使用船舶耐波性衡准来衡量。对于耐波性衡准,不同研究机构和专家学者提出了不同的建议,比较有代表性的建议包括《船舶设计实用手册(总体分册)》、北欧合作研究计划以及国际标准化组织(ISO)卫生与安全委员会(HSC)的船舶耐波性执行标准[2],上述建议虽然数据上略有不同,但差别不大,通过分析总结得出人能承受的最大横摇角为10°,纵摇角为4.8°,超过这个界限则认为人无法正常活动;人能正常工作的最大横摇角为8°,纵摇角为3°,超过这个界限则认为人无法正常工作。考虑到海洋核动力平台的运行要求,需满足在工作状态下横摇角尽量不超过8°,纵摇角尽量不超过3°。
1.3.2 设备对海洋核动力平台摇摆的要求
海洋核动力平台设备主要分为平台设备及核动力装置2部分,其中平台设备主要遵循GJB、中国船级社等相关规范要求,核动力装置主要参考俄罗斯关于核动力船舶的相关规范;此外,由于海洋核动力平台需要在海上进行装卸料操作,因此还需要满足极为苛刻的装卸料操作要求,如表4所示。
综上可知,为满足海洋核动力平台所有设备的使用要求及海上装卸料操作要求,平台在工作状态下的横摇角应尽量不超过6.5°,纵摇角不超过5°。
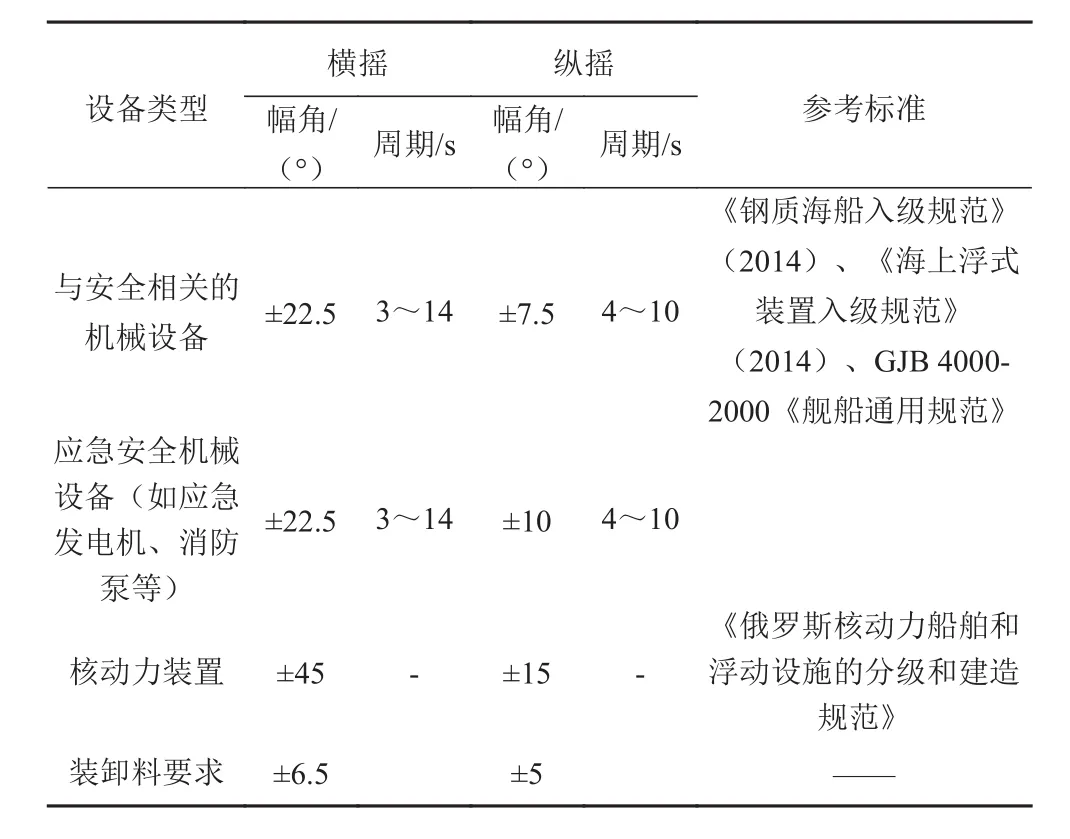
表4 海洋核动力平台设备摇摆限定值要求Tab. 4 The limit of swing angle of marine nuclear power plant
1.3.3 海洋核动力平台海况条件及运动性能总结
通过分析上述数据可得,平台纵摇相对于横摇而言,其摇摆幅度较小,加之目前并没有很好的减小纵摇的方法,因此本文暂不考虑纵摇的影响。结合上述海洋核动力平台运行环境、运动性能以及人员设备对摇摆角的要求,得出海洋核动力平台海况条件及运动性能总结如表5所示。

表5 海洋核动力平台海况条件及运动性能Tab. 5 The sea state and athletic performance of marine nuclear power plant
根据表5可知,在6~7级海况并且平台处于横浪状态时,海洋核动力平台横摇角可能超过要求值,为了使横摇角在规定范围内,此时有必要使用减摇装置来缓解横摇。
2 减摇方式介绍
一般来说,实现船舶减摇的途径大约有3种,即增大阻尼系数、减小船舶固有频率、直接减小扰动力或力矩。目前应用比较广泛的减摇装置主要包括:舭龙骨、减摇鳍、减摇水舱、减摇陀螺及舵减摇[3]。
2.1 舭龙骨
2.1.1 减摇特点
舭龙骨结构简单、造价低、效能高、没有运动部件、便于维护,且在任何情况下都有减摇效果,因此被广泛应用到各类船舶。
2.1.2 典型应用实例
目前几乎所有海船都毫无例外地装有舭龙骨,它已成为海船船体的一部分。
2.2 减摇鳍(非零航速)
2.2.1 减摇特点
减摇鳍是目前最常用且减摇效果最好的船舶主动式减横摇装置。减摇鳍有一个较大的缺点,鳍所产生的用来减摇的力矩跟航速平方成正比,所以在低速情况下减摇效果很差,零航速时没有减摇效果。减摇鳍在横浪下减摇效果最好,在迎浪、特别是尾斜浪下的减摇效果不理想甚至不减摇。
2.2.2 典型应用实例
目前许多国家海军的中高速大型船舶、许多商船和其他船舶都装有减摇鳍,收放式减摇鳍主要装在较宽船型的船舶上,如客船、车客渡船、滚装船、集装箱船等。
2.3 零航速减摇鳍
2.3.1 减摇特点
相比于普通减摇鳍,零航速减摇鳍无需航速即可完成减摇,但所需功率大大高于普通减摇鳍的控制动力。
2.3.2 典型应用实例
VT Naiad Marine联合公司推出的S@ATM零航速减摇系统己经设计定型并被安装到许多正在建造的游艇上(如MY Princea Vlantina号游艇);美国的Quantum船舶工程公司于2002年开发了多种规格的名为OnAnchorTM的零航速减摇鳍系统,当年就有18支船安装了该公司的零航速减摇鳍。
2.4 减摇水舱
2.4.1 减摇特点
减摇水舱的减摇效果跟航速没有直接关系,可以在任何航速下减摇,此外还具有结构简单,消耗的能量小,造价低廉,易于维护保养等优点。减摇水舱存在减摇效率相对较低、占用空间大、低频扰动下易增摇等缺点。
2.4.2 典型应用实例
我国的跨海火车轮渡——“粤海铁1号”,采用了英特灵减摇水舱系统;丹麦多艘大型火车轮渡及多艘货船上都装有德国英特灵公司提供的多功能可控被动水舱[4]。
2.5 舵减摇
2.5.1 减摇特点
与鳍减摇装置相比,舵减摇具有造价低,所占空间小,使用和维修方便,不增加附加阻尼,以及便于对原来没有配备减摇装置的现役船舶进行加装改造等优点。舵减摇缺点是需要很大的功率和舵速,民用船舶的舵机必须进行改造方可安装。另外,舵减摇控制器对船舶参数高度敏感,船体结构的微小变化、船舶装载的改变、船舶航速的变化及舵机参数的改变等所引起的船舶参数的变化都会使减摇效果下降,甚至使减摇控制失败。
2.5.2 典型应用实例
Blohm+Voss industries公司在过去的10年左右的时间里,就已经为22条船配套了舵减摇设备,其中大部分为海军用户,包括荷兰海军、韩国海军和德国海军[5]。
2.6 陀螺减摇
2.6.1 减摇特点
陀螺减摇应用比较成熟,其噪音低、结构紧凑、占用空间小、无航速限制、不增加航行阻力、可以单独制造和安装,在船舶零航速下亦可产生很好的减摇效果。陀螺减摇的缺点是目前还未普及大型化,绝大部分情况下应当用于排水量小于100 t的船艇。
2.6.2 典型应用实例
美国海军曾于1992年在UUS Worden 驱逐舰上安装了陀螺减摇装置;此外,陀螺减摇已经有大型化趋势,如意大利在排水量为41 700 t的豪华班轮Conte Di Savoia上安装了1套主动陀螺减摇装置[6]。
2.7 减摇装置分析
2.7.1 减摇装置对比
根据文献及相关厂商提供的数据[7],总结各种减摇方式对比分析如表6所示。
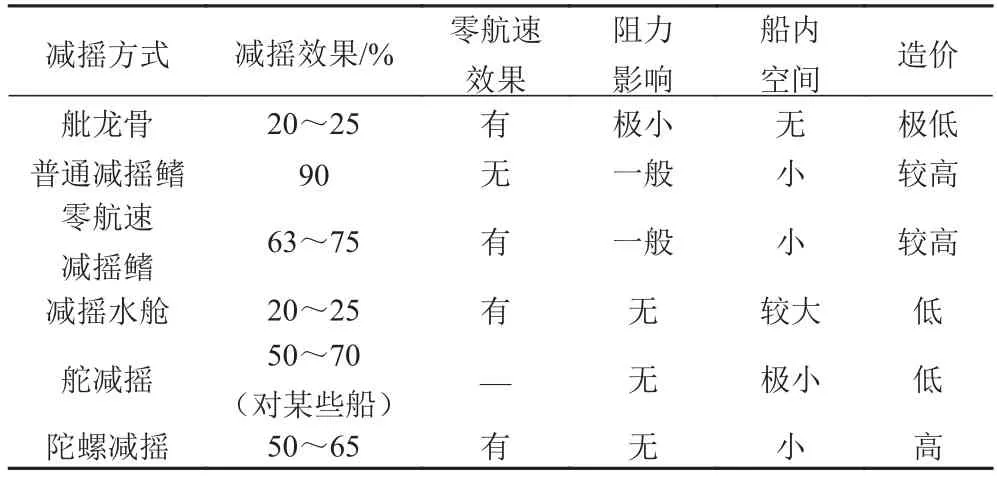
表6 减摇方式对比分析Tab. 6 Comparison and analysis of various stabilizer
2.7.2 减摇装置总结
通过综合分析海洋核动力平台运行特点及主要减摇装置的性能等,得出结论如下:
1)舭龙骨结构简单、造价低、效能高,且在任何情况下都有减摇效果,它已成为海船船体的一部分,海洋核动力平台同样安装有舭龙骨。
2)由于海洋核动力平台长期单点系泊于渤海海域,所以大部分时间处于零航速状态,普通减摇鳍的作用微乎其微;此外,海洋核动力平台没有安装舵机,因此舵减摇也不适用。
3)由于零航速减摇鳍技术难度大,对于大排水量船舶的减摇效果不明确,加之目前国内尚没有企业可以独立生产零航速减摇鳍,技术成熟度不高,因此零航速减摇鳍也不适用。
4)减摇水舱和减摇陀螺都可以在零航速下实现船舶减摇,目前技术比较成熟的被动可控式减摇水舱以及减摇陀螺耗电量小,国内已有厂家可以独立生产并且其产品也已有较广泛的应用,减摇陀螺虽鲜有大型船舶应用的实例,但其减摇原理是力矩的叠加,随着陀螺数量的增加理论上可以实现大型船舶的减摇,因此应用减摇水舱和减摇陀螺对海洋核动力平台进行减摇的可行性较大。
3 减摇水舱及减摇陀螺方案设计结果介绍
针对海洋核动力平台项目,分别进行了减摇水舱方案及减摇陀螺方案的设计工作。
3.1 减摇水舱
海洋核动力平台减摇水舱方案设有中部与首部2个减摇水舱,中部减摇水舱舱容1 230 m3,装载804 t淡水。首部减摇水舱舱容1 676 m3,装载943 t淡水。整个减摇水舱方案共需空间2 906 m3,总重量约2 000 t。减摇水舱方案需要船舶供电系统提供两路380 V,50 Hz的三相交流连续供电,在各种工况下设备的最大用电功率为20 kW。减摇水舱系统在控制气阀开启和关闭时,需要船舶高压气系统为其供气,系统需要两路供应压力3MPa的高压气,每路耗气量120 m3/h。
减摇水舱的仿真计算结果如图3所示。
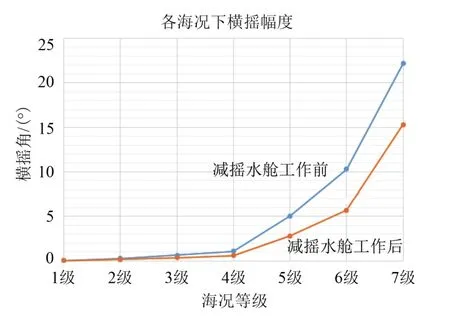
图3 仿真计算结果Fig. 3 Simulation results
根据仿真计算数据可知,在6级海况下,减摇水舱减摇效果达到44.8%,在7级海况下,其效果可以达到31%。
3.2 减摇陀螺
减摇陀螺在大排水量船舶上的应用目前尚处于理论研究阶段,缺乏成熟的实验方法和仿真手段,但由于减摇陀螺最终输出的是减摇力矩,因此其减摇方法可以简单理解为是力矩的叠加,依据这个原理即可进行方案的初步设计[8]。
减摇陀螺方案共有2个设计思路,一是采用一个或几个大角动量陀螺,二是采用多个小角动量陀螺。考虑到技术成熟度的因素,海洋核动力平台减摇陀螺方案采用方案2,即采用多个目前市面上已有成熟产品的500 k N.m.s角动量型号的减摇陀螺叠加的方案,本方案采用20个角动量为500 k N.m.s的减摇陀螺,共提供10 000 k N.m.s角动量。每个减摇陀螺的外形尺寸约为3.5 m×3.5 m×3.5 m,重量10 t。单个陀螺耗电量约为45 kW(运转功率),总耗电量为900 kW,噪音不超过75 dB,检修周期为10 000 h/次,寿命约为20年。
根据力矩计算数据可知,在6级和7级的海况下,减摇陀螺减摇效果均可达到60%。
4 减摇装置设计结论
通过对海洋核动力平台运行环境及运动状态的分析,得出减摇装置设计结果如表7所示。
给出减摇水舱及减摇陀螺代价对比如表8所示。
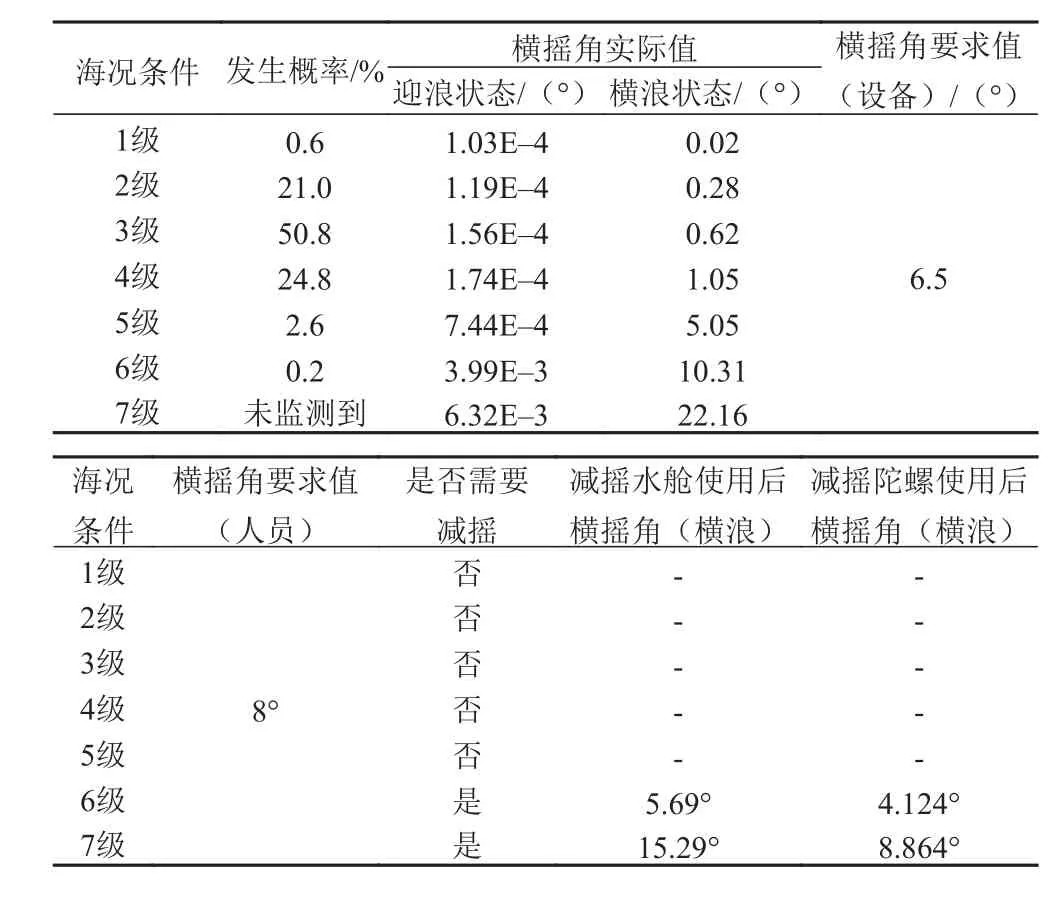
表7 海洋核动力平台减摇装置需求分析Tab. 7 Demand analysis of stabilizer of marine nuclear power plant
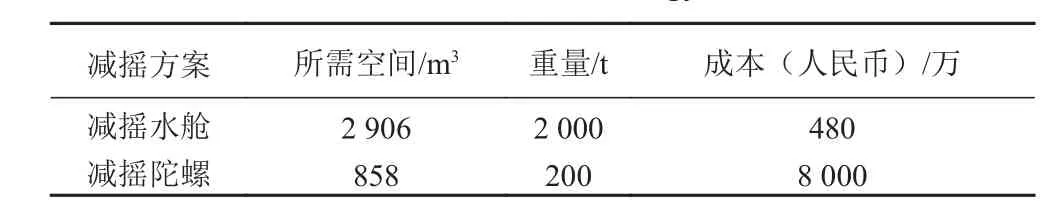
表8 减摇水舱及减摇陀螺代价对比Tab. 8 The price comparison between anti-roll tank and anti-roll gyro
通过综合分析,可得如下结论:
1)在1~5级海况下,船舶横摇角都在允许范围内,不需要使用任何减摇设备进行辅助;在6~7级海况下并且处于横浪状态时,船舶摇摆角超过允许范围,此时通过减摇水舱及减摇陀螺方案均能保证6级海况下船舶摇摆角在允许范围内,但在7级海况下仍然不能满足要求。根据《西北太平洋波浪统计集(1961–1990)》可知,渤海海域未检测到过7级海况发生的情况,因此认为此设计结果满足要求;
2)减摇陀螺虽减摇效果相对较好,对设备空间的要求也小,但其价格极其昂贵,已远远超出以发电盈利为最终目的的海洋核动力平台项目所能承受的范围;
3)减摇水舱技术成熟度高,目前也已有大排水量船舶应用的实例,其减摇效果虽然不及减摇陀螺,但也能达到要求,且其成本远远低于减摇陀螺,应用的现实性高;此外,减摇水舱虽占用船内空间及重量较大,但结合海洋核动力平台自身特点,可将减摇水舱兼做压载水舱,在合理规划设计后,其空间及重量代价可以维持在可承受范围内,因此决定选择减摇水舱作为海洋核动力平台的减摇方式。
5 结 语
海洋核动力平台属于典型的非自航式船舶,此类船舶的减摇问题一直以来都是困扰着船舶行业的难题,此外,由于搭载核动力装置,平台对减摇的要求更加严格。本文对海洋核动力平台减摇方式进行研究,通过分析海洋核动力平台的运行环境及运动性能,对减摇方式进行了选择和设计,最终将平台在设计海况下的摇摆幅度控制在合理的范围内,为该类问题的解决提供了思路。
猜你喜欢
水上消防(2022年1期)2022-06-16
国际太空(2021年8期)2021-11-05
神剑(2021年3期)2021-08-14
少儿科技(2021年10期)2021-01-20
海洋开发与管理(2020年2期)2020-09-10
价值工程(2019年36期)2019-01-11
舰船科学技术(2018年7期)2018-07-25
水运管理(2017年11期)2018-01-02
太空探索(2015年10期)2015-07-18
中国水运(2014年12期)2015-01-09
