模型试验大范围流场实时测量系统研究与应用
2018-09-01 05:05:18曲兆松陈继杰刘佳星包丽洁
水利科技与经济 2018年7期
曲兆松,张 娜,陈继杰,刘佳星,包丽洁
(南京思孚泰科信息技术有限公司,南京 210023)
1 概 述
在水利模型试验中,往往要进行流场的流速分布测量,早期采用流速仪或表面示踪计时的方法。其缺点是接触式,对流场干扰大,测量范围有限,无法获取同时刻的大范围流场信息[4]。20世纪60年代发展起来的粒子图像测速技术(Particle Image Velocimetry, PIV),利用光学技术和图像分析技术,实现无干扰测量,可提供瞬时全流场。其原理是图像识别每个网格内多个粒子的平均运动状态。其算法较为复杂,对于大范围流场计算量很大,早期受数据存储限制,很难实现实时测量。需先采集图像存储下来,然后再进行计算[1]。PIV技术适用于测量范围较小,粒子浓度较高时,局部精细化流场的测量[8]。
粒子示踪测速技术PTV(Particle Tracking Velocimerty)是PIV技术的一个分支,其原理为识别单个粒子的运动状态。由于其算法简单,计算速度快,对于测量范围大,流场粒子浓度较低时的流场测量更加经济适用[2]。但PTV技术由于粒子浓度较低,提取流场信息较少,不适用于对流场细微结构的研究[8]。另外,为实现大范围流场的实时测量,还需采用视频信号同步技术及局域网控制各计算机同步采样技术[3]。其中,视频信号的传输速度和传输距离,直接影响流场的测量结果[5]。
在这些PIV和PTV测速研究中,测量设备基本相同,但是适用的实验环境不同[2,6,8]。在科学研究和工程应用中,常常是两种实验条件并存,所以实现两种技术的同时应用显得尤为重要。本文将介绍一种新的大范围流场实时测量系统,在软件算法方面,将PIV和PTV技术叠加应用,可实现对粒子低浓度的普通工况和粒子高浓度的精细回旋细节流场的同步分析计算。在硬件系统方面,采用大靶面的千兆网工业级高清相机和大容量磁盘阵列,实现大范围流场的高频采集和高速计算;利用光纤等技术,保证数据传输不受限制和传输信号不发生衰减。
2 系统工作流程
本系统的工作流程,首先通过对应比例关系,将图像坐标与实际模型或原型坐标进行匹配。接下来采集所需拍摄区域的背景图像,后续数据处理时,可进行阈值调整将示踪粒子突出显示。开始流速测量时,在水面尽可能均匀撒入示踪粒子,待粒子可稳定体现流体运动状态时,通过摄像方法记录颗粒运动。采用图像分析技术得到粒子的位移,曝光时间间隔为运动时间,根据位移和时间计算运动速度。PIV和PTV算法核心分别是识别网格内粒子的平均位移和单独粒子的位移,以网格粒子的平均速度或粒子速度,代表其流场内相应位置处流体的流速矢量及其他运动参数。见图1。
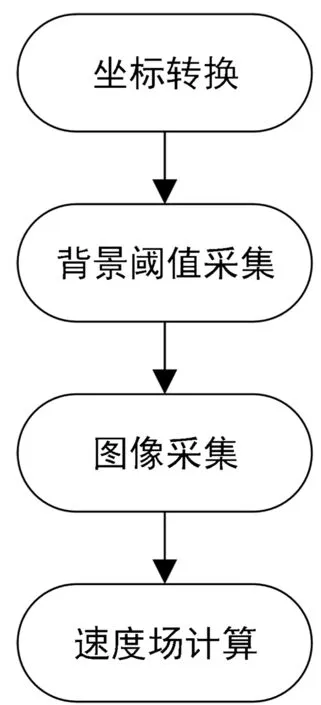
图1 流场实时测量系统工作流程图
3 系统介绍
硬件系统包含物联网终端阵列、智能通信网络、系统控制及数据存储中心等3部分。系统框架见图2。
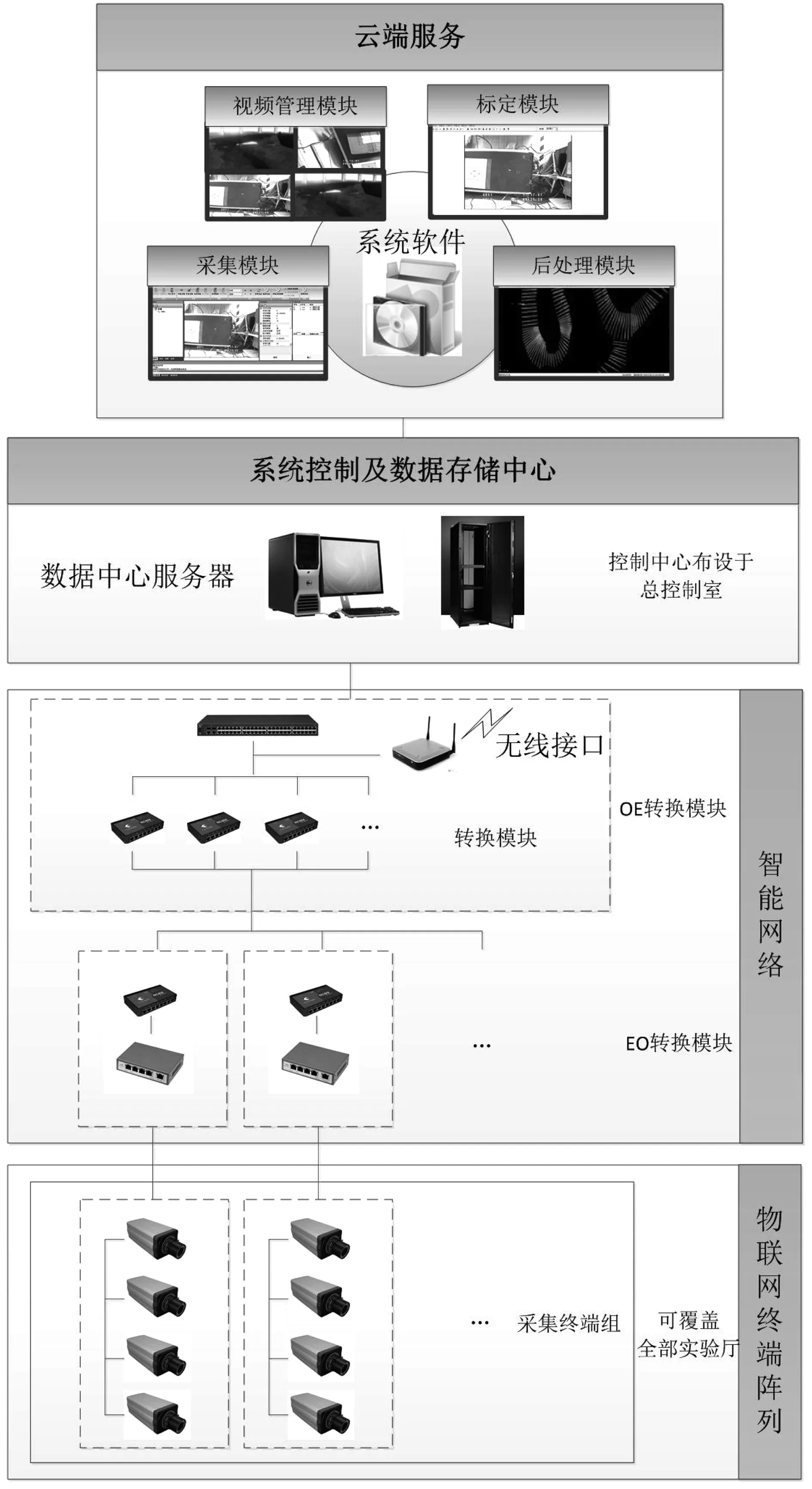
图2 系统整体结构图
3.1 硬件系统
3.1.1 物联网终端阵列
物联网终端阵列由一部或多部工业级高清相机组成。工业相机使用大靶面的CMOS感光芯片,感光质量和空间分辨率较好。并且有千兆网接口,可无损保存原始图像,还可进行参数远程调节。千兆网工业相机还具有高数据传输率和易于集成的特性,适合大规模组网。相机固定在观测区域上方,可根据现场情况选择垂直安装或者倾斜安装。单路相机拍摄的面积,由安装高度和角度决定。观测区域等条件确定时,可计算实际需要相机的数量,组成物联网终端阵列,相机数量根据需要扩增。
3.1.2 智能通信网络
智能通信网络由光电转换模块和光纤等构成。如果采集终端输出的电信号直接传送到电脑上时,传输距离50 m时发现数据有丢帧现象。50 m可能为采集终端电信号直接传输的极限距离。本系统将采集终端输出的电信号,通过光电模块信号转换后,采用光纤网络进行传输。光纤线路布设简单,传输距离不受限制,几乎没有信号衰减,保证流场数据的完整性。光纤技术将系统的覆盖范围从以往常规的几百平方米可扩展到上万平方米。智能通讯网络根据接入采集终端数量、数据传输距离及实验规模,配设相应的设备。
3.1.3 系统控制及数据存储中心
系统控制及数据存储中心用于视频信号数据的管理和存储。本系统支持包括移动便携测量等多种测量方式。存储中心采用大容量的磁盘阵列,可实现流场的高频采集和高速计算。
3.2 软件系统
软件系统由导入模块、标定模块、流场模块及后处理软件模块构成。支持任意定点流速矢量变化过程的输出查看,提供流场测量结果的静态和动态显示功能;后处理及分析模块提供专业过滤插值算法、平均流速计算、流量计算、支持PIV、PTV流场计算;具备完善的数据回放功能、图像及视频录制、浏览及管理功能。
流场测量计算的矢量图和云图成果见图 3和图 4。
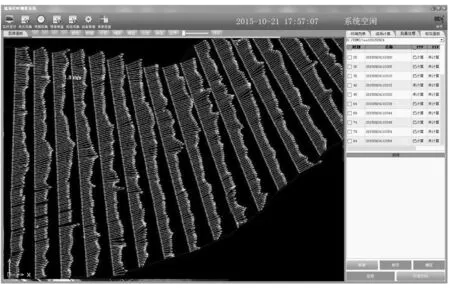
图3 流场测量矢量图成果

图4 流场成果云图方式显示
3.3 PTV和PIV算法叠加处理
针对PTV和PIV分别适应于粒子低浓度普通工况的大范围流场和高浓度粒子的精细回旋细节流场测量。本系统包括PTV和PIV两种算法,根据原始数据,处理数据时可选用最佳算法,也可将两种算法叠加得出流场结果。图5(a)中灰色矢量箭头为PTV的计算结果,蓝色矢量箭头为PIV计算结果。图5(b)为两种算法叠加处理结果。
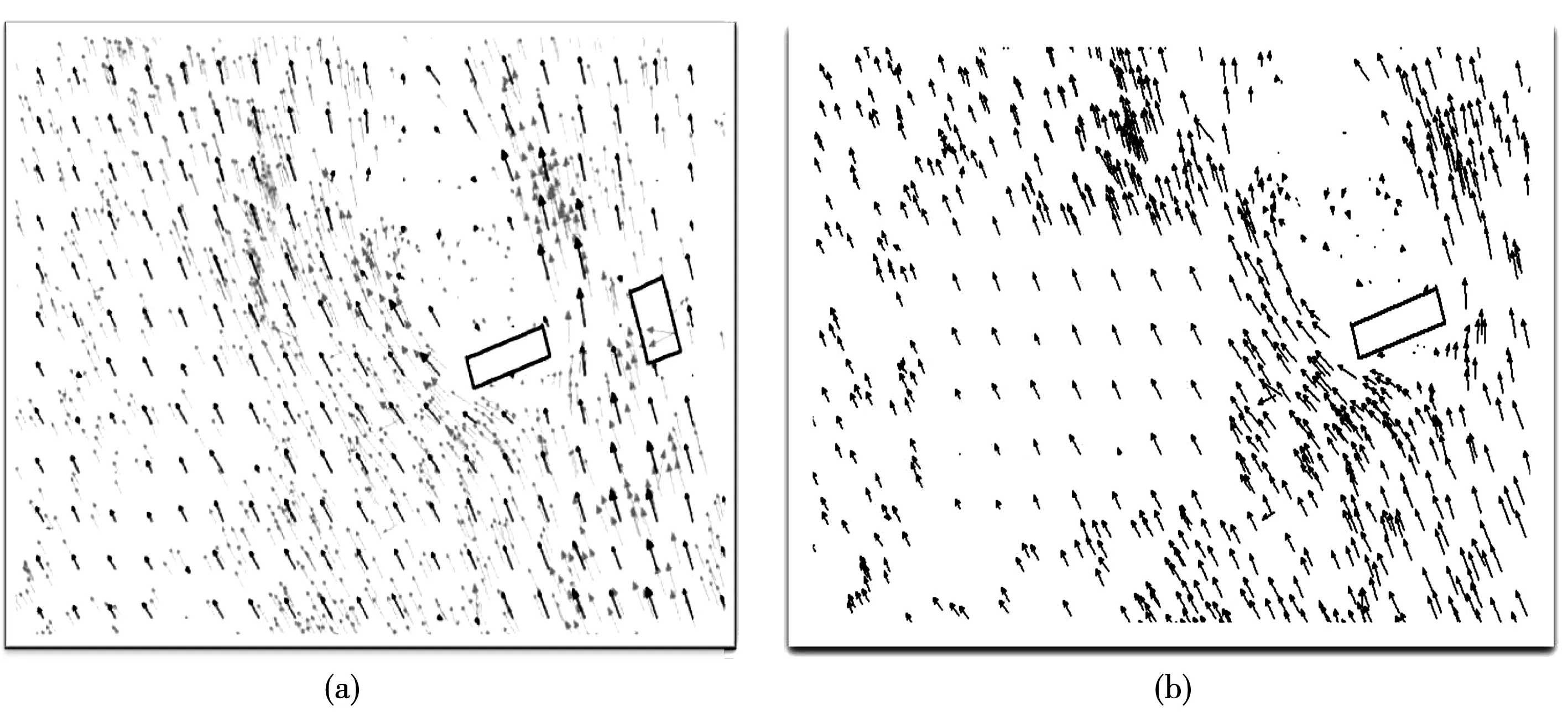
图5 PTV和PIV叠加处理结果
4 系统应用
4.1 应用概述
长江航道规划设计研究院6#实验基地总面积达2×104m2以上,大厅顶部为弧状,其中有流场测量需求的模型有:铁熊模型、窑监模型、调碾、东流模型和固定玻璃水槽,整体观测面积约为2 300 m2。综合考虑每个相机覆盖面积与现场安装环境,最终确定选用1套大范围表面流场测量系统和3套小范围表面流场测量系统的覆盖区域,共18路相机。其中,相机布设情况为铁熊模型1套,窑监模型1套,调碾、东流模型1套,还有1套安装于固定玻璃水槽上方。图6为相采集终端的布设方案图。

图6 采集终端布设方案
其中固定玻璃水槽长60 m,宽4 m。图 7为在水槽上方采集终端布设图,图7中黑色的圆点代表采集终端,一共布设4个,用于观测水槽中流场情况。本文将重点对本系统在大型试验水槽上的流场实验展开讨论。

图7 大型水槽试验区域采集终端布置图
4.2 实验内容和结果分析
本系统的相机安装于水槽上方约10 m处,垂直角度拍摄,4个相机总覆盖面积约为360 m2。在观测三门核电厂潮流泥沙物理模型时,摄像机安装高度6 m时,12个相机覆盖的模型面积约为76 m2[6]。相比之下,本系统的终端覆盖范围有显著的优势。本系统采用的千兆网工业相机,实现供电和数据传输的同时运行。如采用普通黑白CCD摄像机相机,每台相机都配套视频线和电源线,现场测量线缆重量约为0.05 kg/m,按每路相机距控制箱距离为20 m计算,每路相机线缆重量为2 kg/20 m。本系统采用的工业相机至少可节省1/2的线缆重量,节省安装成本,减少高空安装时对大厅结构的承重压力。
长江航道科研实验基地的大厅长约为200 m,设计总控室需兼顾试验水槽和其他物理模型。由于本系统利用光电转换模块和光纤传输,中控室的设置可不考虑采集终端数据传输。考虑到实际试验的便捷性,固定玻璃水槽的流场观测选用一套流场测量系统控制4路相机采集数据。
试验中在水槽上游摆放一个障碍物(长1.2 m,宽0.2 m,高0.25 m),测量下游区域的流场分布。图 8为实际采集终端拍摄的试验场景初始图像,图8中白色的小点是示踪粒子。本系统采用示踪粒子粒径为22 mm,跟随性、分散性、加速性能良好,是国家专利技术,为展示流场运动特性提供保障。
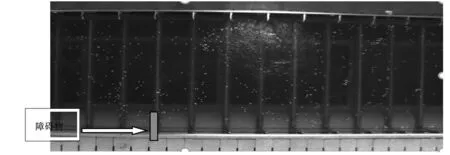
图8 试验场景采集图片
图9和图10为PIV和PTV两种算法叠加处理的流场结果图。可以看到在障碍物下游,水流变化比较剧烈,呈现出的涡街,受涡旋的离心作用,在局部区域出现反向流。下游离障碍物越远,涡街现象逐渐消失。
由于PTV技术跟踪单个粒子,跟踪到的流速即是实际的流速,不会出现被均化的效果,并且对环境光要求不高,降低实验难度。PIV技术是测量网格窗口内粒子的平均速度,对粒子浓度要求很高,粒子浓度直接影响测量精度,而在物理模型范围大时,需投入大量人力,以保证粒子浓度。所以在本实验数据处理时采用PTV技术为主,测量大范围的表面流场,在精细区域可采用PIV技术为辅助,解决粒子在漩涡环境下跟踪难度提高的问题。
本系统测量误差小于3%,图像校正后的变形误差小于0.4像素。在利用PTV算法观测三门核电厂潮流泥沙物理模型的流场时,涨潮时平均流速相对误差为4.6%,落潮时平均流速相对误差为1.1%[6],本系统的成果算法方面有优化,且与实际情况相符,计算结果可信。

图9 流场计算结果
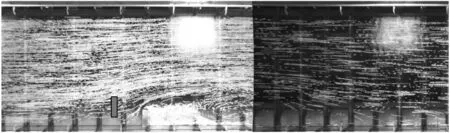
图10 流迹线结果
5 结 论
本文提出一种模型试验大范围表面流场实时测量系统,系统包含物联网终端阵列、智能通信网络、系统控制及数据存储中心、软件系统等4部分,实现了大范围图像同步采集和数据传输,快速计算流场的实时数据;将PIV和PTV算法叠加应用,可同时满足大范围流场跟踪测量和小范围精细流场观测,适用于模型试验大范围表面流场的同步测量。
在长江航道规划设计研究院新基地进行了本系统的测量应用,结果表明,本文研究成果具有较好的适用性和先进性。
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05 07:29:42
中学生数理化·八年级物理人教版(2022年4期)2022-04-26 14:11:16
发明与创新·小学生(2021年11期)2021-12-24 00:38:56
大电机技术(2021年2期)2021-07-21 07:28:24
大众科学(2020年7期)2020-10-26 09:24:30
小天使·五年级语数英综合(2018年9期)2018-10-16 11:31:48
小天使·六年级语数英综合(2018年1期)2018-10-08 09:32:50
东华大学学报(自然科学版)(2018年1期)2018-06-29 03:35:00
海洋信息技术与应用(2017年2期)2017-06-21 19:51:29
幸福(2016年6期)2016-12-01 03:08:13