单旋翼植保无人机翼尖涡流对雾滴飘移的影响
2018-08-31 09:17:40兰玉彬尹选春卢玉华
农业机械学报 2018年8期
文 晟 韩 杰 兰玉彬 尹选春 卢玉华
(1.华南农业大学工程基础教学与训练中心, 广州 510642; 2.国家精准农业航空施药技术国际联合研究中心, 广州 510642; 3.华南农业大学工程学院, 广州 510642)
0 引言
农用植保无人机因其具有作业效率高、防治病虫害效果较好、灵活性较高等优势,已得到越来越多的重视[1-3]。由于植保无人机通常采用低容量或超低容量的喷施作业模式,因此雾滴在靶标区域的沉积量是评价其施药质量的重要指标之一[4]。影响农药雾滴沉积、飘移的因素有很多[5],如喷洒系统、风速风向和农药的理化特性等。与有人驾驶固定翼飞机相比,单旋翼植保无人机旋翼产生的风速较大、风压较高,因此旋翼下方的流场特性是影响雾滴飘移沉积的主要因素之一[6]。
单旋翼植保无人机主旋翼的下洗气流为湍流,其流场形态复杂。为研究无人机旋翼流场对雾滴飘移与沉积的影响,张宋超等[7]研究了N-3型农用无人直升机作业时所需的安全农药飘移缓冲区,通过试验与数值模拟得出侧向风是机身侧后方雾滴沉积最大影响因素,当侧向风速在1~3 m/s时,需要预留8~10 m的喷施缓冲区。王军锋等[8]针对FR-200型大载荷植保无人直升机喷洒系统,基于Fluent软件,就飞行速度、喷杆相对位置、喷施角度等参数对雾滴流场的影响进行了研究,研究结果表明,无人机飞行速度越大、喷头位置越靠近机身下方与喷杆两端、喷施角度越大,雾滴的抗飘移能力越低。杨知伦等[9]研究了雾滴在XV-2型植保无人机旋翼下洗气流的分布特性,通过理论分析与实地试验发现,无人机飞行高度是影响喷幅的主要因素,当植保无人机飞行高度为6 m时,喷幅约为10 m;飞行高度为8 m时,喷幅约为12 m。BAE等[10]研究了带有高架尾桨平衡系统无人直升机下洗流场中雾滴沉积的均匀性,发现这种尾部平衡桨农用无人机对机身左右两侧的雾滴沉积平衡有明显的改善作用。
翼尖涡流是飞机的机翼或桨叶产生正升力时,由于上、下翼(桨)面的压强差,下方的高压气流循着翼(桨)尖向上滚卷流动到较低压的翼(桨)面上侧,所形成的一种螺旋式的漩涡运动。ZHANG等[11]针对有人驾驶固定翼飞机(Trush 510G型)的研究表明,在无侧向风情况下,翼尖涡流是影响其雾滴飘移的一个重要因素。单旋翼植保无人机的飞行状态与固定翼飞机相比有显著区别,在飞行过程中,其旋翼流场中产生强烈的涡流场[12],会对雾滴的飘移与沉积产生较大影响。为研究单旋翼植保无人机流场中翼尖涡流对雾滴飘移沉积的影响因素,本文对单旋翼植保无人机在不同的飞行速度下,产生的翼尖涡流和尾迹对雾滴飘移的影响规律进行分析,并对喷杆的垂直高度和喷头位置等喷施参数进行试验确定。利用计算流体力学方法模拟单旋翼植保无人机在不同飞行速度下的翼尖涡流及尾迹的分布情况,并基于拉格朗日离散相粒子跟踪法模拟不同粒径的雾滴在无人机下洗流场中的运动轨迹,在此基础上探寻不同粒径的雾滴附着在靶标的情况,并通过使用由深圳高科新农技术有限公司生产的单旋翼植保无人机S-40进行户外试验,分析户外试验与数值模拟的差异,以便于更好地指导单旋翼无人机的实践作业。
1 物理模型
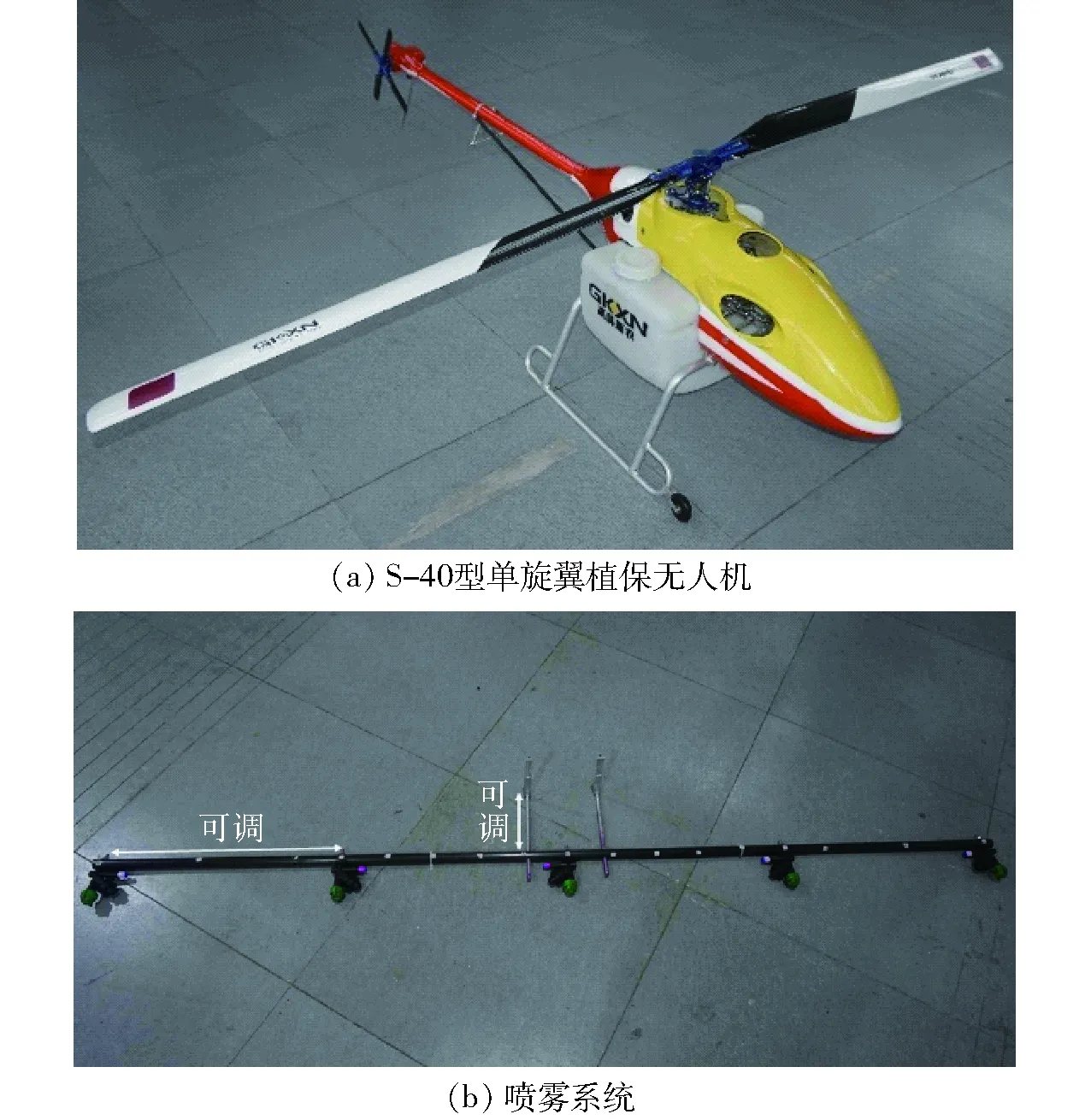
图1 无人机与喷雾系统 Fig.1 UAV and spray system
电动单旋翼植保无人机如图1a所示,其主要参数为:外形尺寸2.5 m×0.57 m×0.67 m,最大起飞质量41.5 kg,药箱容积为20 L。为研究不同喷杆高度及喷嘴位置情况下,旋翼产生气流的涡旋尾迹对雾滴飘移的影响规律,课题组自制了喷雾系统,如图1b所示,扇形压力喷头的喷雾角为110°,当压力为0.5 MPa时,其流量为0.76 L/min,喷头数目为5个,喷杆在旋翼下方的垂直高度可调,为0.35~0.55 m,且各喷头之间的距离(旋翼下方的位置)可调,为0.10~0.50 m。
为准确模拟出单旋翼无人机在不同飞行速度下的流场特性,无人机主旋翼和尾桨的物理模型通过三维立体扫描仪(VTOP208B型,东莞市驰一三维科技有限公司)扫描所得,如图2所示。无人机的机体、起落架、药箱、喷杆和喷头等部件则是根据测绘的尺寸利用软件UG NX10.0(Siemens Product Lifec-ycle Management Software Inc.)建立三维模型。构建的电动单旋翼植保无人机完整三维模型如图3所示。

图2 三维扫描 Fig.2 Three-dimensional scanning 1.主桨 2.三维扫描仪 3.计算机 4.点云数据 5.尾桨 6.标记盘
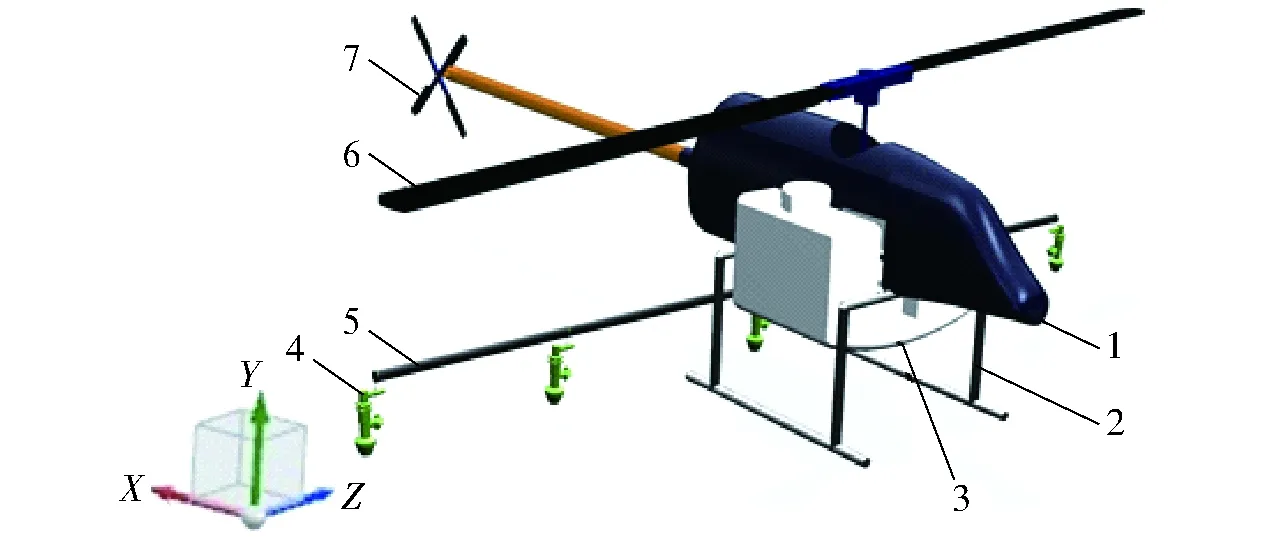
图3 S-40型植保无人机模型 Fig.3 S-40 plant protection UAV model 1.机身 2.起落架 3.药箱 4.喷嘴 5.喷杆 6.主桨 7.尾桨
坐标系的定义如图3所示,无人机前进的方向设为X轴负方向,无人机上升的方向设为Y轴正方向,无人机机身从左到右设为Z轴正方向。
2 数值模拟
为了分析旋翼在高速旋转运动中的流体动力学特性,商用计算流体力学软件(Computational fluid dynamic, CFD),如Fluent(ANSYS Inc.)和CFX(ANSYS Inc.)等,通常在动态仿真中使用动网格技术[13-16]。但对无人机旋翼这种模型边界复杂的情况,数值模拟过程中的网格重构常常需要耗费大量的计算时间,而且极易因出现负体积而导致计算过程出错。基于格子玻尔兹曼(Lattice-Boltzman, LBM)方法的计算流体动力学方法却在计算具有复杂边界条件和非平稳运动物体的三维流场问题中具有优势[17],并可以准确处理微观和宏观尺度上的问题[18-19]。由于这种灵活的基于粒子的计算方法避免了传统的网格划分过程,离散化阶段效率高,计算结果准确,所以本文采用基于LBM方法的XFlow(Next Limit Dynamics S.L.)软件模拟单旋翼植保无人机下洗流场分布情况。
2.1 模拟方法
XFlow采用的LBM方法计算域为均匀立方体单元,单元的特征晶格结构为D3Q27(图4),有27个离散速度矢量,其中包括晶格体心的1个离散速度矢量为零的点,6个从体心到晶格体面中心的离散速度矢量,12个从体心到晶格体边中点的离散速度矢量,8个从体心到晶格体顶角的离散速度矢量。

图4 D3Q27晶格模型 Fig.4 Lattice of D3Q27 model
在该方法中,选取格子玻尔兹曼方程作为求解方程,格子玻尔兹曼传输方程在晶格上离散化的方程为[20]
fi(x+ei,t+dt)=fi(x,t)+Wi(x,t)
(1)

(2)
式中fi——粒子速度分布函数
ei——沿着第i个方向的速度
dt——时间步长
fi(x,t)——t时刻x点处i方向上的粒子速度分布函数
Wi——碰撞算子

τ——无量纲松弛参数
在引入(Bhatnagar-Gross-Krook, BGK)碰撞算子的近似简化后,方程可还原为描述流体流动的控制方程N-S方程,并且可以再现低马赫数的流体动力学状态[21]。
2.2 湍流模型
为准确模拟旋翼的流场特性,使用大涡模拟(Large eddy simulation, LES)的壁面自适应局部涡粘度模型(Wall adapting local eddy, WALE),该方案提供了相同的局部涡流粘度和近壁特性[22],实际的执行公式为
(3)
其中
Δf=cwΔ
(4)
(5)
(6)
式中vt——模拟亚格湍流的湍流涡流粘度
Δf——滤波器尺度
cw——常数,通常取0.325
Δ——单位网格尺度

δαβ——克罗内克尔符号
gαβ、gβα、gγγ——应变率张量,可用LBM方法作二阶矩获得
下角α、β、γ表示空间的方向,在二维情况下,α、β、γ可取1、2,在三维情况下,α、β、γ可取1、2、3。
2.3 边界条件
设置的计算域是在X、Y、Z方向尺寸为30 m×5 m×20 m的长方体,如图5所示。其中,4个着色的边界设为固壁边界;速度入口为进风口,速度的方向为沿X轴的负方向,设定入口处流速0~7 m/s,以模拟植保无人机的不同飞行速度。在计算域中,无人机的主旋翼距离底面的高度为3 m,无人机三维模型的主要尺寸如图6所示。
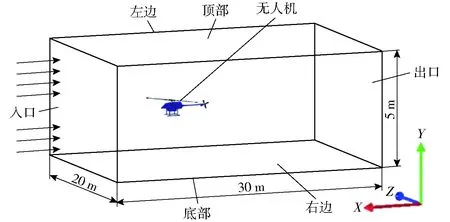
图5 计算区域示意图 Fig.5 Schematic diagram of computational domain
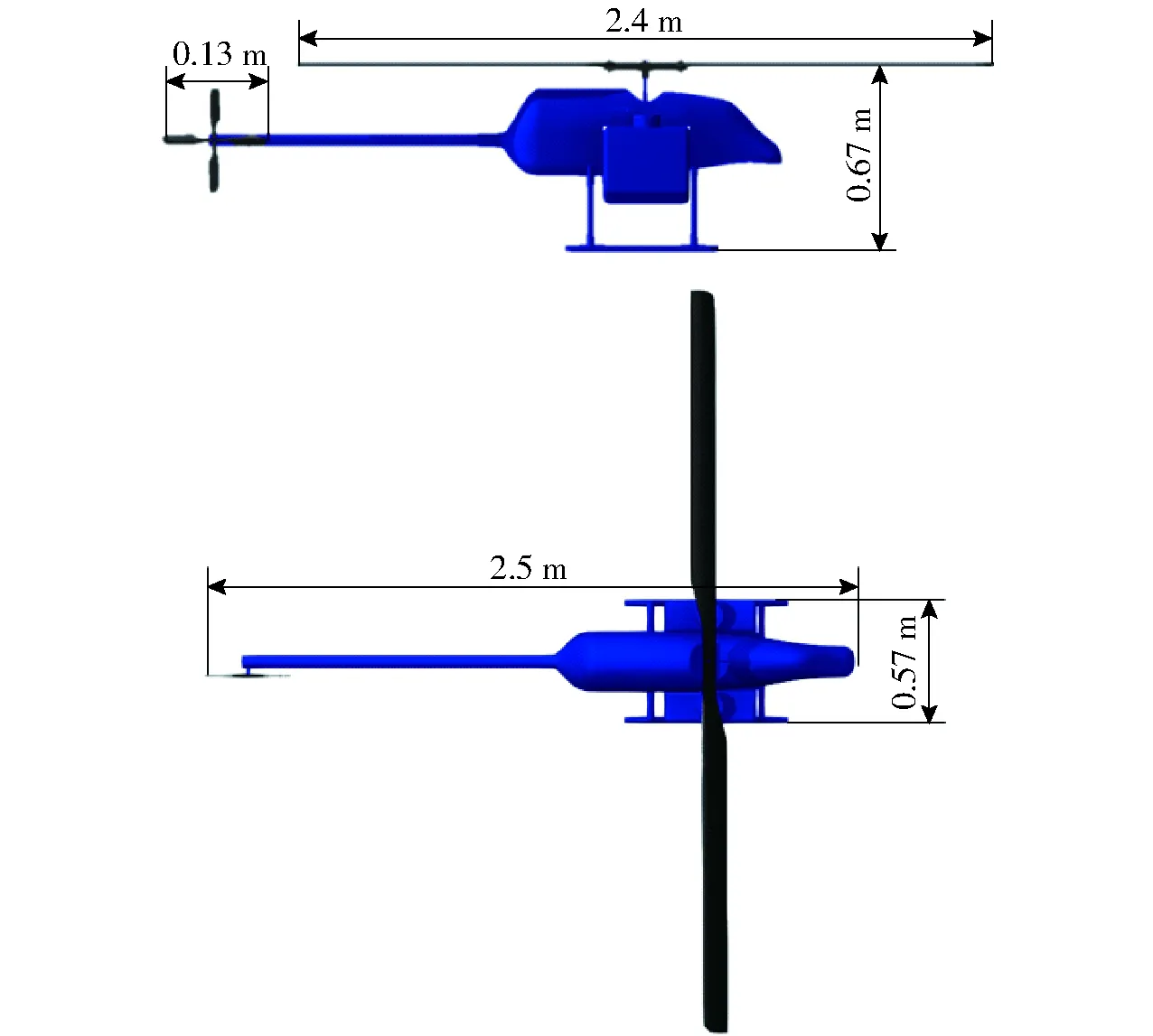
图6 无人机尺寸 Fig.6 Size of UAV
为准确求取旋翼的流场参数,还需要提高计算域的空间和时间分辨率,以获得所有不规则的流动湍流尺度。由于模拟的细化重点在于旋翼表面、机身表面以及下洗流场尾迹部分,为节省计算资源,虚拟风洞的全局空间细化分辨率尺寸设定为0.2 m。机身、主旋翼、尾翼表面细化算法设定为自适应方法,机身细化分辨率尺寸设定为0.05 m,主旋翼与尾翼的细化分辨率尺寸设定为0.025 m。为了能够捕捉到下洗流场尾迹的特性,将下洗流场尾迹的细化分辨率尺寸设定为0.012 5 m,尾迹细化阈值设定为5×10-5m。参数设定后自动离散化的效果图如图7所示。

图7 计算区域的离散划分 Fig.7 Discrete division of computing regions
设定主旋翼与尾翼的运动特性分别为绕各自坐标系的Y、Z轴转动。主旋翼与尾翼转速比为1∶5。
3 流场模拟结果分析
3.1 翼尖涡流分布情况
为了获取单旋翼植保无人机翼尖涡流对雾滴飘移影响的规律,针对单旋翼植保无人机悬停状态下的数值模拟进行分析。由于直升飞机的主旋翼在转动过程中会产生翼尖涡流[23-26],为捕捉到这种翼尖涡流,选取无人机在悬停状态下的模拟云图(图8)进行分析。图8a是单旋翼植保无人机在飞行速度为0 m/s(悬停状态)下的等涡量云图,其中ψ是尾迹涡龄角,即旋翼旋转过的角度所对应的翼尖涡环。从图中可知,本次模拟捕捉到涡龄角540°左右的旋翼翼尖涡流,其中前行侧涡龄角为360°的翼尖涡流因受到涡龄角为540°的翼尖涡流的诱导影响,相比于后行侧在Y方向上的位移有明显的加快趋势,是导致雾滴在无人机下洗流场非对称分布的一个重要因素。图8b是无人机在悬停状态下的三维涡量云图,由于直升机主旋翼翼尖涡流的一个重要特性是收缩畸变[27],受下方尾迹涡的诱导作用,旋翼翼尖涡流离开旋翼后会迅速收缩。从图中可知,当涡龄角ψ增大至540°后,翼尖涡流的收缩量减小,而在这之后翼尖涡流开始出现非规则畸变,相邻的翼尖涡之间出现相互耦合现象,从而导致旋翼涡系发生破坏并最终形成紊流状态。这也是雾滴在无人机下洗流场作用下沉积不均匀的关键原因。
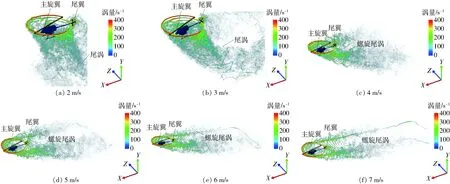
图9 无人机不同飞行速度下的涡量分布 Fig.9 Vorticity distribution of UAV at different flight velocities

图8 无人机悬停状态下的涡量分布 Fig.8 Vorticity distribution diagram of UAV hovering state
图9为无人机飞行速度为2~7 m/s状态下的涡量分布图。从图9可知,当单旋翼植保无人机飞行速度小于等于3 m/s时,尾涡飘向机身下方未形成螺旋形尾涡。但当无人机飞行速度大于3 m/s后,机身下方的旋翼旋涡在前方来流与尾翼气流的共同作用下,形成2个逐渐向后旋转扩散的螺旋形尾涡,且飞行速度越快,螺旋形尾涡的高度也会随之增高,旋翼流场变得越复杂。显然,该螺旋形的尾涡将诱导机身下方雾滴产生向上的运动,从而使雾滴产生飘移。
图10为无人机飞行速度7 m/s时不同时刻下,尾流结构变化的速度云图。从图中可知,当t=0.1 s(图10a)时,涡量分布呈同心圆状向后扩展,当t=0.2 s(图10b)时,旋翼下方的翼尖涡环中有横向环状涡开始逃逸。当t=0.3 s(图10c)时,可以看到机身后方翼尖涡环被尾桨剪断,环状涡向后扩大,螺旋形尾涡开始形成。当t=0.4 s(图10d)时,2个螺旋形尾涡已经形成,并有向后扩散的趋势。所以无人机机身后方的螺旋形尾流是在前方来流与尾翼的共同作用下形成的。
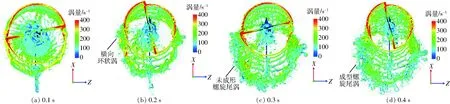
图10 飞行速度7 m/s时涡量瞬态变化 Fig.10 Vorticity transient changes at flight speed of 7 m/s
为进一步研究单旋翼植保无人机飞行高度对螺旋形尾涡的影响规律,对无人机飞行速度为5 m/s,飞行高度为2~5 m 4种情况进行数值模拟。图11为无人机飞行高度2~5 m时机身后方螺旋型尾涡截面图。由图可知无人机飞行高度为2、3、4、5 m时分别对应的螺旋型尾涡向机身后方的扩散距离为4、8、12、12 m。由图11d可知,机身后的2个螺旋形尾涡并不保持在一条水平直线上,而是从靠近旋翼下方逐渐下降到地面。此外,2个螺旋形尾涡呈现出不对称分布。
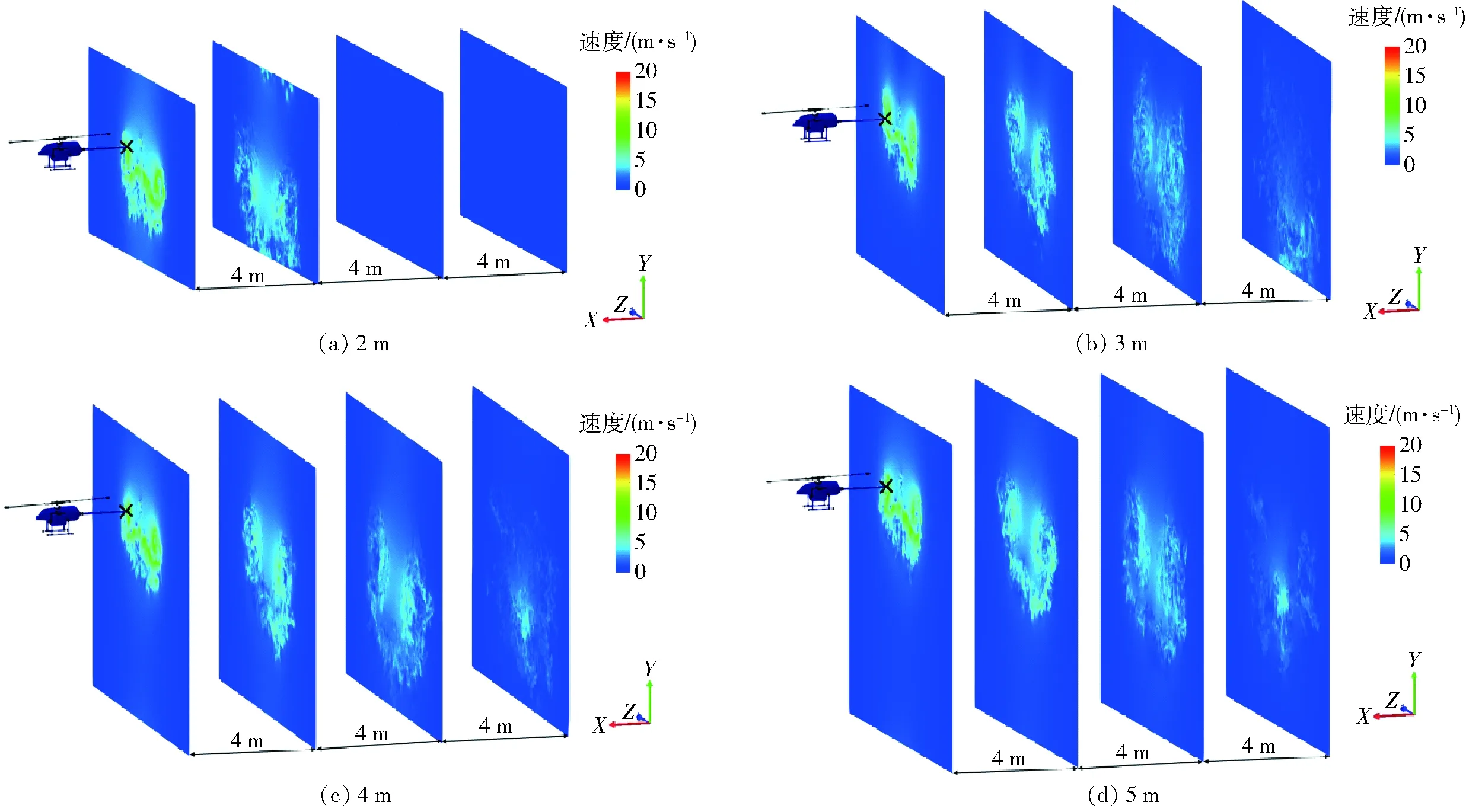
图11 不同飞行高度机身后方螺旋型尾涡分布 Fig.11 Distribution of spiral vortexes behind fuselage at different flight heights
图12为飞行高度5 m时,无人机机身后方不同截面上的螺旋形尾涡速度分布图,机身后的截面依次为第1、2、3、4截面。由图可知,第1、2截面速度曲线走势呈M型,因此在这2个截面上螺旋尾涡的诱导速度最大值9 m/s出现在涡核处,表明该处对雾滴有较强的卷吸能力。而在第3、4截面上的螺旋型尾涡速度在1~2 m/s之间波动,表示截面上的2个螺旋型尾涡对雾滴的卷吸能力减小。并且1~4截面的速度依次减小,表明距离机身后方越远,螺旋型尾涡的诱导速度就越小。因此,在机身附近螺旋尾涡对雾滴诱导影响较大,更容易造成雾滴飘移与沉积不均匀。

图12 飞行高度5 m时不同截面上的速度 Fig.12 Speed at different cross sections at flight height of 5 m
上述研究表明:①单旋翼植保无人机下洗流场中的紊流使下洗流场变得复杂,是雾滴沉积不均匀的重要原因。②无人机飞行速度大于3 m/s时,机身后方会产生螺旋型尾涡,且速度越大,螺旋型旋涡在空中存在的时间就越长。③无人机机身后方螺旋型尾涡形成的两个重要原因是前方来流的大小与尾翼的作用。④无人机飞行速度不变,在一定范围内飞行高度的增加会导致螺旋型尾涡向机身后方扩散距离增大。⑤机身后方的2个螺旋型尾涡呈不对称分布,且距机身越远其诱导速度越小。
3.2 喷杆不同位置处对雾滴飘移的影响
为了研究喷头位于无人机下洗流场中不同位置处,所喷出的不同粒径雾滴因无人机翼尖涡流造成的飘移情况,在无人机需要安装喷杆的位置处放置5条速度检测线,如图13所示,5条检测线的长度为4 m,其中P1点的坐标为检测坐标原点,由于实际的喷杆长度为2 m,故喷杆的中点为Z=2 m处。考虑到单旋翼植保无人机的旋翼结构和药箱位置,实际作业时喷杆配置在旋翼和无人机脚架之间的区域,5条检测线依次位于无人机主旋翼下方的0.35、0.4、0.45、0.5、0.55 m处,在水平方向上距离主旋翼的转轴0.32 m,与实际的喷杆位置保持一致。

图13 速度检测线位置示意图 Fig.13 Sketch of speed detection line position

图14 喷杆位置处Y轴方向的速度 Fig.14 Spindle position Y-axis speed
因为无人机下洗流场中Y方向的诱导速度是造成雾滴卷吸的关键因素,因此对无人机不同飞行速度下,喷杆处于主旋翼下方不同位置处Y方向速度进行取样。图14为无人机飞行速度1~7 m/s时,喷杆位置处Y方向速度分布曲线。由图可知飞行速度并不影响纵向速度突变点,速度突变位置发生在喷杆两端点外侧附近以及机身下方附近,但在机身下方速度突变的幅值较小,对雾滴卷吸能力不强,因此雾滴发生卷吸现象的主要位置在喷杆的两端点外侧附近。当无人机飞行速度大于3 m/s时,随着无人机飞行速度的增大,喷杆上纵向诱导速度的最大值逐渐减小,且速度的脉动幅度也随之变大,雾滴容易发生飘移。纵向诱导速度最大值位于喷杆端点附近,左右两侧的速度呈现出不对称分布,飞行速度越大机身两侧速度差异越明显,这是雾滴沉积不均匀的重要因素。喷杆距离主旋翼越远,纵向诱导速度越小,无人机飞行速度越大,不对称分布现象越明显。
上述研究表明,对于单旋翼植保无人机而言,喷杆的垂直高度位置并不能对减少雾滴的飘移起到明显的作用。无人机的飞行速度对其下洗流场造成了较大的影响,随着飞行速度的不断增大,其下洗流场越不稳定。由于主旋翼的转向与飞行速度的影响,导致无人机的下洗流场纵向诱导速度呈现不对称分布,容易导致机身两侧的雾滴飘移量不同。
3.3 雾滴粒径的分布情况
研究表明[28-29],雾滴粒径是影响雾滴飘移的一个关键因素,当雾滴粒径小于200 μm时容易产生雾滴飘移。为研究不同粒径雾滴在单旋翼无人机下洗流场的分布规律,先对课题组自制喷雾系统中压力喷头的雾滴谱进行试验测定。测量仪器为珠海欧美克仪器有限公司生产的DP-02型激光粒度仪,其量程范围为1~1 500 μm。图15为扇形压力喷嘴的雾滴谱分布图。为准确模拟出不同粒径的雾滴在旋翼风场作用下的飘移和沉积规律,按照图15所示雾滴粒径的分布百分数来设置不同粒径的数量,并利用离散相粒子跟踪法模拟在无人机下洗流场中雾滴的运动轨迹。

图15 雾滴粒径分布图 Fig.15 Droplet particle size distribution
3.4 雾滴离散的流线追踪
图16为单旋翼植保无人机在不同飞行速度下雾滴的运动轨迹,其中不同的颜色代表不同粒径雾滴的运动轨迹。其中图16a~16c中的喷杆距离主旋翼的垂直距离为0.35 m,喷头之间的距离为0.5 m。图16a为悬停状态下,不同粒径雾滴的迹线图,从图中可知,当无人机处于悬停状态时,其机身下方的雾滴没有出现飘移现象,而是在重力作用下,随着主旋翼的下洗流场直接飘落到地面。此外在旋翼流场的边缘处,有部分雾滴因翼尖涡流的收缩畸变而向流场的中间区域飘落,这也导致无人机的喷幅略有减小。图16b为无人机飞行速度2 m/s时其雾滴迹线图,由图可知,机身下方70%左右的雾滴在重力的作用下直接飘落到地面上,有30%左右的雾滴因受到翼尖涡流的影响,在喷杆两端点外侧附近形成两个螺旋状的雾滴迹线,并在重力与翼尖涡流的作用下飘移到机身后方,且2个螺旋状雾滴迹线并不对称,导致无人机的喷幅略有增大。图16c为无人机飞行速度5 m/s时,机身后方雾滴迹线图,由图可知,机身下方有38%左右的雾滴被翼尖涡流卷起上扬,在机身左右形成2个不对称的螺旋状雾滴迹线,此时雾滴已经被卷吸到空中,且一些细小雾滴长时间悬浮在空气中,容易在更远的距离引起飘移,其中被卷吸的雾滴中粒径小于100 μm的雾滴约占总雾滴的80%。图16d为无人机飞行速度5 m/s、喷杆距离主旋翼0.55 m、喷头之间的距离0.5 m情况下的雾滴运动轨迹,此时约37%的雾滴因翼尖涡流的诱导作用而向上方卷扬,对比图16c可知喷杆位置的降低可以减小雾滴受到翼尖涡流的卷吸量。图16e为无人机飞行速度5 m/s、喷杆距主旋翼0.35 m、喷头之间距离0.1 m时的雾滴运动迹线,由图可知,34%左右的雾滴被卷吸至喷杆上方,所以减小喷头之间的距离也能够减小因翼尖涡流造成的雾滴飘移。显然无人机飞行速度越大,喷幅也会略有增大,雾滴飘移量也随之增大,且喷杆垂直距离的改变对雾滴因翼尖涡流的卷吸造成的飘移影响并不明显,喷头的位置越靠近旋翼翼尖,翼尖涡流对雾滴的卷吸量越大。

图16 无人机不同飞行速度下雾滴卷吸情况 Fig.16 UAV droplets flying at different flying speed suction situations
4 试验
4.1 试验方法
为了研究在不同条件下单旋翼植保无人机翼尖涡流对雾滴飘移的影响,对单旋翼植保无人机的雾滴飘移进行了室外试验验证。试验地点位于广东省深圳市大鹏新区高科新农有限公司的无人机试验基地(北纬22°35′57″、东经114°29′55″),天气晴朗,空气湿度52.7%,温度12.5~15.8℃。如图17所示,试验场地长34 m、宽32 m。为了收集飘失在空气中和落在地面的雾滴,利用聚乙烯线与水敏纸作为收集物。地面雾滴飘移检测区设置5条采集带,每条采集带长32 m,相邻采集带之间间距5 m,水敏纸布置在距离地面0.5 m处。每条采集带放置15张水敏纸,以无人机航线与采集带的交点为坐标原点,0~4 m内每隔1 m放置一张水敏纸,4~16 m内每隔4 m放置一张水敏纸,水敏纸水平放置。空中雾滴飘移检测框架位于采集带5的后方,无人机飞行速度2、5、7 m/s时雾滴飘移检测框架的位置距离采集带5分别为2、8、14 m。雾滴空中飘移测试框架左右两侧布置聚乙烯线,单侧共布置5条聚乙烯线,每条线之间相距1 m。图18为户外试验现场照片,无人机从采集带1开始以设定速度飞行,在采集带5开始喷施质量浓度为5 g/L罗丹明B溶液,飞过框架关闭喷头。试验共分为5个架次,第1、2、3架次,无人机的喷头之间距离为0.5 m,喷杆的垂直高度为0.35 m,飞行速度依次为2、5、7 m/s,第4架次无人机飞行速度为5 m/s,喷头之间的距离为0.1 m,喷杆的垂直高度为0.35 m,第5架次无人机飞行速度为5 m/s,喷头之间的距离为0.5 m,喷杆的垂直高度为0.55 m,且每个架次重复3组试验。

图17 无人机喷施试验示意图 Fig.17 UAV spray test diagram

图18 现场试验照片 Fig.18 Photo of field test
无人机每完成一个架次,等无人机停稳后立即使用专业手套收集水敏纸与聚乙烯线并放置在试验前标记好的试验袋中,试验袋密封并放置在便携式冰盒中,试验完成后将所有水敏纸与聚乙烯线带回实验室进行数据分析。水敏纸利用扫描仪扫描,并对扫描出的图像用DepositScan(美国农业部)软件分析。聚乙烯线用蒸馏水洗脱3遍,得到稀释罗丹明B溶液,再利用由天津港东科技发展股份有限公司生产的F-380型荧光分度计检测溶液荧光值。通过对水敏纸与聚乙烯线分析的数据得出无人机在不同条件下雾滴的地面与空中飘移情况。
根据MH/T 1050—2012《飞机喷雾飘移现场测量方法》规定,计算出喷雾飘移沉积量与喷雾飘移量分别为[30]
(7)
(8)
式中βdep——喷雾飘移沉积量, μL/cm2
ρsmpl——样品荧光计读数
ρblk——不含罗丹明B的空白采样器的荧光计读数
Fc——校准系数, μg/L
Vd——溶解罗丹明B的稀释溶液体积, L
ρspray——喷头处采样喷雾液中罗丹明B含量, g/L
Ac——收集喷雾飘移的投影面积, cm2
θdep——喷雾飘移量,%
βv——喷施量,L/hm2
雾滴分布均匀度用雾滴覆盖密度的变异系数表示,由各个采样点的雾滴覆盖密度计算得出。变异系数越小,雾滴分布越均匀,其表达式为[31]
(9)
其中
(10)
式中SD——样本标准差
CV——变异系数, %

λi——每个采集点喷雾沉积观测值
n——采样点的数量
4.2 试验结果与分析
空中雾滴飘移测试框架使用喷雾飘移量表示雾滴在空中飘移的情况,图19是不同试验参数下的喷雾飘移量,该值越大表示雾滴飘移量越大。为了验证雾滴的空中飘移与翼尖涡流有关,采用自下而上雾滴累积飘移量占总飘移量90%时所对应的高度作为飘移高度。结果表明,在喷杆高度与喷嘴之间距离不变的情况下,无人机飞行速度为2、5、7 m/s时所对应的雾滴飘移高度分别为2.922、3.541、3.627 m,从中可知,无人机飞行速度越大,雾滴向无人机上方的飘移距离也越大,但当飞行速度大于5 m/s时雾滴飘移高度增长较为缓慢。当无人机飞行速度为5 m/s,分别改变喷头之间的距离为0.1 m、喷杆距离主旋翼的高度为0.55 m时所对应的雾滴飘移高度为3.396、3.480 m,因此,降低喷杆的高度,减小喷头之间的距离均可以减小雾滴向上飘移的距离。
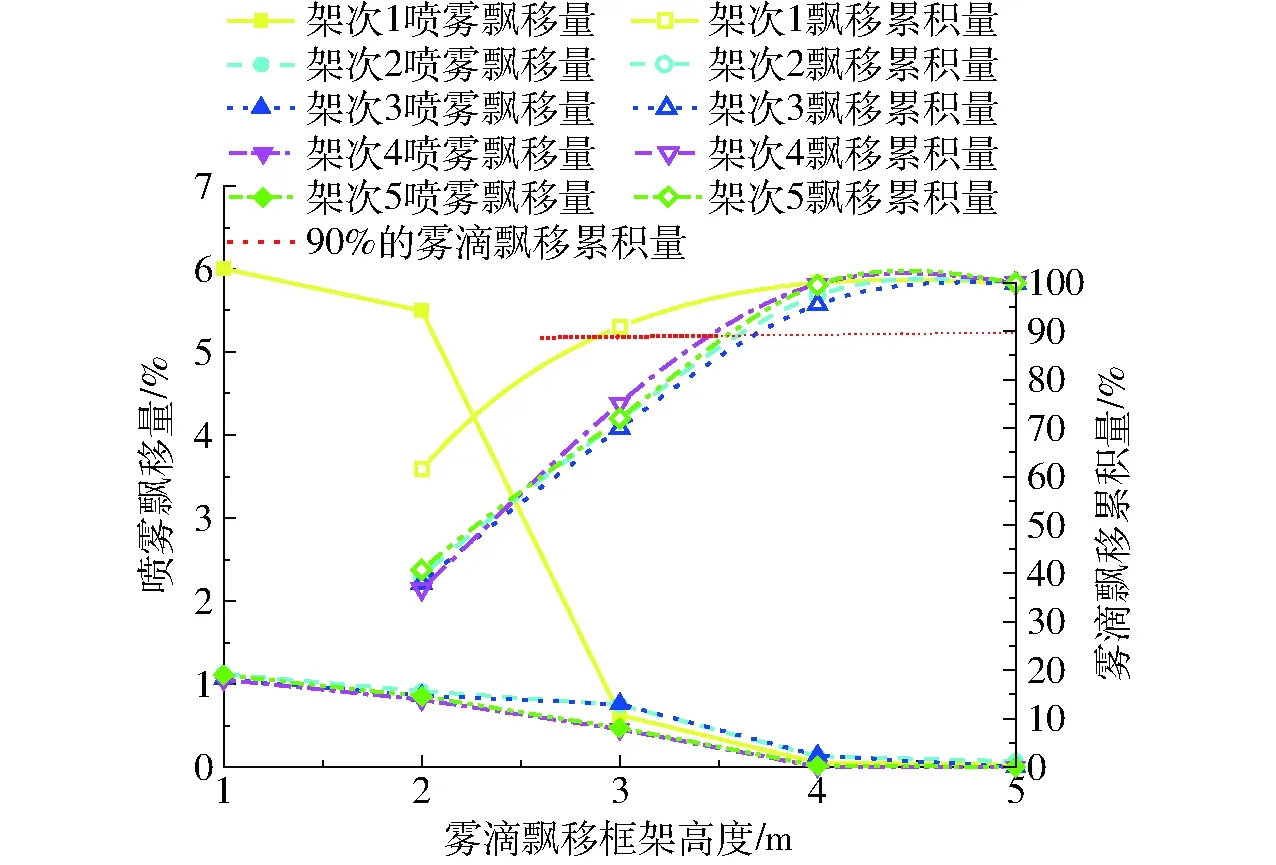
图19 垂直距离雾滴飘移率 Fig.19 Vertical distance droplet drift rate
由于雾滴空中飘移的影响因素主要为无人机主旋翼翼尖涡流的卷吸作用,取雾滴飘移累积量与飞行速度、喷杆垂直高度、喷嘴之间的距离进行相关性与回归分析,得到标准回归方程为:y′=0.945x′1-0.026x′2+0.11x′3,且所对应的相关系数为0.95、0.06、0.175,说明雾滴飘移累积量在显著水平α=0.05的条件下,与无人机飞行速度呈显著正相关(P<0.05),而与喷嘴之间的距离(P>0.05)、与喷杆距主旋翼的距离(P>0.05)无显著性相关。雾滴的垂直向上飘移距离的相关性因素的由大到小依次为飞行速度、喷嘴之间的距离、喷杆垂直高度。
因翼尖涡流造成的雾滴飘移主要影响因素是飞行速度,选取喷杆距离主旋翼0.35 m、与喷嘴之间距离0.5 m,飞行速度为2、5 m/s机身后方采集带上不同粒径雾滴占该采集带总雾滴的百分比表示不同粒径雾滴在机身后方的飘移距离。从图20a可知无人机飞行速度2 m/s时,在机身后方10 m处粒径小于100 μm的雾滴占总飘移雾滴数的99%,而在机身后5 m处仅占37%,说明在机身后方5~10 m内粒径大于100 μm的雾滴已经全部沉降到地面,而一些极少且极小的雾滴可以飘移到机身10 m以后或更远的地方。图20b为无人机飞行速度为5 m/s时机身后方不同粒径雾滴占该采集带上雾滴总数的百分比。在机身后方15 m处98%的雾滴粒径小于100 μm,而在机身后10 m处有55%的雾滴粒径小于100 μm,表明粒径大于100 μm的雾滴在机身后方10~15 m内已经全部沉降到地面,而粒径小于100 μm的雾滴可以飘移至机身后方15 m以外的地方。对无人机飞行速度(V)与粒径小于100 μm雾滴的飘移距离(M)进行线性拟合,得出关系式为:M=0.51V-2.8。由此可知无人机飞行速度越大,细小雾滴因受到主旋翼翼尖涡流的螺旋形尾涡的卷吸作用造成的飘移距离就越远,这与数值模拟的结果基本一致。
图20 机身后方不同粒径的雾滴所占百分比 Fig.20 Percentage of droplets with different particle sizes behind fuselage
5 结论
(1)单旋翼植保无人机的翼尖涡流在形成螺旋型尾涡后,对雾滴的飘移影响较大。当无人机的飞行高度为3 m,且飞行速度在2~5 m/s时,随着速度的增大,翼尖涡流在机身后方形成的螺旋型尾涡的高度越高。此外,当无人机的飞行速度不变时,随着飞行高度的增加,螺旋型尾涡向后方的扩散距离越大。并且2条螺旋型尾涡呈不对称分布,飞行速度越大,飞行高度越高,尾涡在空中存在的时间越长。
(2)数值模拟与户外试验验证表明,单旋翼植保无人机的飞行速度对雾滴飘移的影响较明显。当飞行速度大于5 m/s时,机身后方的雾滴飘移量较大。
(3)喷杆距离主旋翼的垂直距离越大,其纵向诱导速度越小,且在飞行速度为5 m/s时,喷杆的垂直距离对雾滴飘移的作用不明显,而喷头在旋翼下方的位置越靠近机身处,翼尖涡流对雾滴的飘移影响就越小。
(4)综合比较无人机的飞行速度、喷头在旋翼下方的位置和喷杆垂直高度3个因素,其中无人机的飞行速度对雾滴飘移有较大影响。所以,单旋翼植保无人机在实际作业中应该综合各种因素确定其飞行参数,以减少雾滴飘移,提高农药利用率。
猜你喜欢
兵器装备工程学报(2024年2期)2024-03-04 12:57:12
农业装备与车辆工程(2022年5期)2022-10-31 08:40:08
中国农机化学报(2022年8期)2022-08-12 02:29:10
农业机械学报(2022年2期)2022-03-14 07:57:20
中国民航大学学报(2021年4期)2021-09-26 01:03:36
空气动力学学报(2021年4期)2021-09-17 08:15:36
武汉科技大学学报(2018年5期)2018-10-08 10:52:36
武汉科技大学学报(2018年2期)2018-04-04 08:10:31
农业知识(2018年45期)2018-01-17 16:55:10
实验流体力学(2017年5期)2017-11-07 10:06:35