基于CFD和BP神经网络的超声测风仪阴影效应补偿研究*
2018-08-30 07:04张加宏孙林峰敏1冒晓莉1葛益娴
传感技术学报 2018年8期
张加宏,孙林峰,李 敏1,,4*,冒晓莉1,,葛益娴
(1.南京信息工程大学江苏省气象探测与信息处理重点实验室,南京 210044;2.南京信息工程大学江苏省大气环境与装备技术协同创新中心,南京 210044;3.南京信息工程大学电子与信息工程学院,南京 210044;4.中国气象局气象探测工程技术研究中心,北京 100081)
风矢量是基本的气象要素之一,也是大气边界层最基本的特征量之一,其测量精度直接影响气象预报的准确性。传统机械式风速仪因其自身机械结构的固有缺陷测量低风速时灵敏度与精度较低,并且在恶劣的工作环境中使用寿命较短。随着科学技术的发展,基于时差法的高精度超声测风仪逐渐发展成熟[1-5],但其测量的准确性易受阴影效应的影响,通常难以达到气象行业高端应用的要求,为提升超声测风仪的测量精度,如何有效解决阴影效应的影响是亟待解决的关键问题。由于超声波探头对风的遮挡,在背风一侧将会出现风速减小的现象,这被称为阴影效应[6-8]。阴影效应引起局部风场的变化,在超声波实时风速测量时,对测量结果将有不同程度的影响。已有研究表明阴影效应是超声风速仪测量误差的一项主要来源[8-10]。例如,Kaimal[8]通过风洞实验证实了超声测风存在阴影效应影响,并给出了阴影效应的经验修正公式。Horst等人[9]则通过5种非正交超声波风速仪的对比试验,得出垂直分量风速也受到阴影效应影响。而最近Frank等人[10]也指出所有3维风速仪均受到阴影效应影响因而在垂直方向上风速的测量结果会普遍偏小。然而迄今为止,人们对超声测风阴影效应系统性的研究较少,缺少定量测算和公开的修正算法。
为了从实验上研究阴影效应的误差修正问题,需要搭建风洞分别在两对传感器中轴线上选取等距的若干个探测点进行风速测量[8,11]。但对不同风速和风向条件下的阴影效应的影响进行系统的测量研究,实验成本代价高,实际操作与修正过程复杂,比较适合用于验证。因此考虑从理论计算方面解决该问题,我们注意到计算流体动力学(CFD)可以通过数值求解分析流体流动等相关物理问题[12-14],目前基于CFD的Fluent软件已成为流体力学分析研究和设计中的一个新的经济、高效而有力的工具。本文将基于Fluent软件对超声测风仪不同风速和风向条件下的阴影效应进行建模仿真研究,分析得出阴影效应对风速风向测量的影响规律,然后根据仿真结果来研究阴影效应的修正算法。鉴于人工神经网络拟合精度高、计算简单、预测准确[15-17],基于Fluent仿真计算的样本数据,本文拟采用BP人工神经网络算法对超声测风仪阴影效应的测量误差进行修正,并给出预测模型。同时我们也利用已有报道的文献[6,9]中的实验结果对该预测模型的准确性进行了验证。本文的研究方法和研究结果为阴影效应误差修正提供了一定的参考价值。
1 超声测风及其阴影效应误差修正原理
1.1 基于时差法的超声测风原理
图1为二维平行式超声测风仪的外形结构,它由两对收发一体的超声波传感器探头构成,探头位置固定不变,以固定频率发射超声波脉冲并测量两对探头的顺、逆风传播时间的差别来计算风速风向[18]。图2为二维超声测风仪的平面示意图,对于二维风速vw,利用东西和南北方向垂直放置的超声波传感器探头构成x轴和y轴[3],将风速进行矢量分解,可以转换成两个一维风速的测量,用vwx和vwy分别代表x轴(东西)和y轴(南北)方向风速。
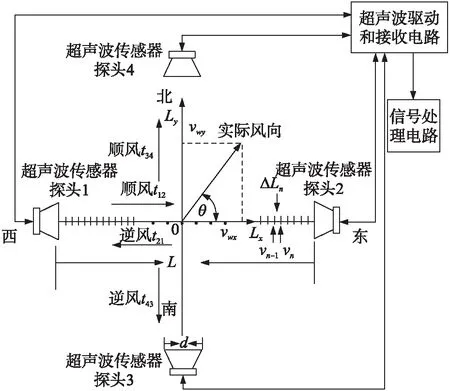
图2 二维超声测风仪的原理示意图

图1 超声测风仪的外形结构
如图2所示,探头的直径为d,假设东西(或南北)相对的两个超声波探头之间的距离均为L,东西方向上顺逆风传播时间为t12和t21,南北方向上的顺逆风传播时间为t34和t43,则
vwx=(L/2)(1/t12-1/t21)
(1)
vwy=(L/2)(1/t34-1/t43)
(2)
(3)
将式(1)、(2)代入式(3)可得实际风速:
(4)
假设风速与水平方向(东)夹角为θ,则风向公式可表示为:
(5)
如果将方向化成东西南北4个方向,也即坐标轴的4个象限,则实际风向角在第1象限时为θ,第2象限时为π-θ,第三象限时为π+θ,第四象限时为2π-θ[3]。根据式(4)和式(5),只要测定两探头之间的间距L、时间t12、t21、t34和t43,就可确定风速风向。
1.2 阴影效应误差修正原理
正如前文所述,在两个传感器探头之间的中轴线上,由于受到阴影效应的影响,造成了超声波传播速度的不均匀变化[6-10]。如果仍采用传统的时差法测量原理来确定风速风向,其测量精度必然会下降。为此,本文对原有方法进行了改进,如图2所示,将传感器探头之间的距离进行等间距分隔,每个分割点作为一个探测点,每个小间隔的距离为ΔLn,通过Fluent流体动力学仿真获取相邻两点处的轴向风速vn-1和vn,则ΔLn小段的平均风速为(vn-1+vn)/2,叠加该速度后为超声波在有风时的传播速度,然后可计算每小段间隔所需的时间Δtn,累加得到超声波脉冲渡越时间,最后结合式(4)和式(5),从而精确测算真实的风速风向。顺、逆风时具体的传播时间的计算公式为:

(6)

(7)
t顺为无风条件下超声波的速度。在x轴方向上,t顺和t逆分别为t12和t21,在y轴方向上,t顺和t逆分别为t34和t43。根据上面的公式可知,要精确测算受阴影效应影响的风速的关键在于准确地获取各个ΔLn小段的平均风速,这些平均风速受到了阴影效应不同程度的影响,本文采用的CFD方法可以准确仿真出风场及其受到影响的情况[12-14]。而一旦获得了阴影效应对风速具体影响的样本数据之后,便可借助于BP人工神经网络预测模型把各种条件下阴影效应的影响计算出来进行误差修正处理,最终获得真实的风速风向。下面给出CFD建模仿真求解受到阴影效应影响的风速的具体过程。
2 CFD计算模型及研究方法
2.1 CFD误差修正流程
CFD的基本思想是将时间域和空间域上连续物理量的场,用有限个离散点上变量值的集合代替,通过建立关于离散点上场与变量之间关系的代数方程组,进而求解并获得场的近似值[12-14]。图3是本文采用CFD方法研究超声测风阴影效应误差修正的流程图。首先确定二维超声测风仪为研究对象,采用ANSYS软件包中的前处理软件ICEM(Integrated Computer Engineering and Manufacturing Code)进行点、线、面行为建模与网格划分,然后导入CFD仿真软件Fluent中进行数值模拟,获取超声波探头结构周围的风场分布,并通过改变边界条件和区域类型进行Fluent稳态仿真与分析处理。接着结合式(4)~式(7),计算得到受阴影效应影响的风速和风向样本数据。最终基于这些样本数据构建BP人工神经网络预测模型,进而实现超声测风阴影效应的误差修正。下文给出各个步骤的具体信息。

图3 超声测风仪阴影效应误差修正流程图
2.2 ICEM建模
ICEM为CFD仿真提供了高效可靠的分析模型。图4给出了采用ICEM的点、线、面工具建立的超声波测风仪的计算模型。在构建模型的空气域时,考虑到较大的空气域能提高计算精度,但同时会加大计算量,而一般情况下,当空气域尺寸达到器件模型的10倍时,精度足以满足计算要求[13],因此本文空气域尺寸设置为器件模型的10倍。如图4所示,构建的超声波测风仪的具体尺寸如下:超声波传感器探头直径d为11 mm,长度为13 mm;弧形处弧角为130°,直径为7.9 mm;臂柱高度为41 mm,直径为7.9 mm。相对的两个超声波传感器探头之间的间距L为200 mm。整个空气域的尺寸为:2 000 mm×500 mm×1 000 mm。图4中也标出了气流入口、气流出口、超声传感器的位置。整个半圆面均作为气流入口,仿真时入口方向设置为西南方向,根据对称性,可推算出气流为西北、东南、东北方向时的风场,并计算出阴影效应引起的风速方向测量误差。

图4 实体计算模型示意图

图5 网格划分情况
2.3 网格划分
为了进行有限体积法计算,CFD仿真前还需对实体模型进行ICEM网络划分。图5给出了网格划分情况,其中图5(a)为整体网络划分情况,中间黑色部分为超声波传感器实体,外围为空气域,不同区域采取了不同的网格大小。图5(b)是超声波传感器探头的网格划分情况,根据实体模型的结构特点,选用了适用性较强的非结构化四面体网格,从图中不难发现,探头网格密度远大于空气域网格密度。值得注意的是,为了提高计算精度,在Fluent仿真时对探头及阴影区域附近采用网格自适应方法也做了加密计算处理。
2.4 Fluent仿真与结果分析
本文采用Fluent仿真软件模拟得到超声波传感器及其附近的风场分布。ANSYS Fluent是当前国际主流的CFD软件,是求解流体流动问题强有力的工具[12-14]。在网格文件导入Fluent后,根据超声波测风仪的实体计算模型,采用了RNGk-ε湍流模型进行稳态仿真,其来源于严格的统计技术,与标准k-ε模型相似,但具有更高精度和可信度。气流入口和出口分别设置为速度和压力类型,超声波探头表面设置为wall类型,速度压力耦合采用PISO算法,控制方程的数值离散方法采用二阶精度的迎风差分,时间离散格式为2阶隐式。由于网格数较多,设置迭代次数为5 000次,当全局最大收敛残差低于10-4时,即认为计算收敛。此外,以美国标准大气下的空气粘度表为参考[19],Fluent仿真中通过修改空气粘度实现温度变化,进而在不同温度条件下改变风速风向来研究阴影效应对超声波测风的影响。
考虑到把测量范围内受阴影效应影响的风速与风向都通过Fluent仿真出来计算量庞大,因此本文着重采用Fluent计算典型的风速风向作为构建BP神经网络所需的样本数据,然后利用BP人工神经网络对测量范围内任意风速风向的阴影效应做预测与补偿处理[15-17]。设置超声测风仪工作的环境温度(气温)范围为-50 °C~50 °C,每隔130次(风速变化13次,风向变化10次)递增10 °C。风速范围设置为0.1 m/s~30 m/s。鉴于4个超声波探头为垂直(90°)分布,选取0~45°可覆盖360°风速场的情况,因而风向角范围设置为0~45°,并且每隔5°递增1次。值得注意的是,上述的风速和风向为期望风速和期望风向,它们是真实要得到的风速和风向。但正如前文所讨论的,这些期望的风速和风向会受到超声测风仪阴影效应的影响,换言之,超声测风仪实际测得的是含有阴影效应影响的风速和风向,它们不是真实的风速风向,因而需要修正处理[9-10]。
作为举例,图6给出了气温为-10 °C、期望风速为20 m/s、期望风向为40°条件下Fluent模拟仿真的结果,图中深色部分为阴影效应区域。根据2.2节提出的理论方法可计算受阴影效应影响的风速和风向,并分别记录为实际测量的初始风速和实际测量的初始风向。本文将所有典型的期望风速、期望风向以及温度条件下超声测风受阴影效应影响的情况进行了Fluent模拟仿真,最终数据结果如图7所示。

图6 超声测风仪的风场分布
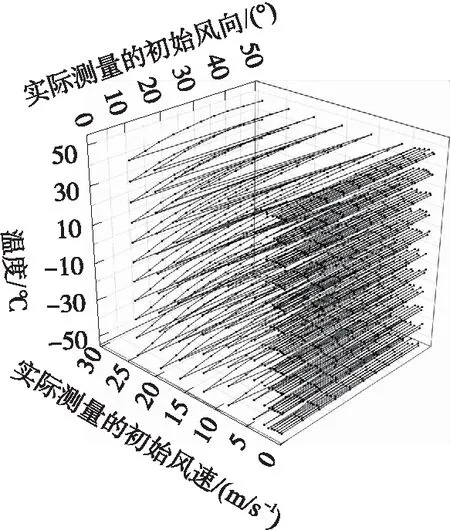
图7 Fluent仿真获得的用于BP神经网络的数据样本
一方面,利用这些数据可以研究阴影效应对真实或期望风速和风向的影响。另一方面,这些数据为BP人工神经网络预测模型的构建提供了样本。下面首先讨论与分析阴影效应对于超声测风的具体影响。如图8所示,曲线族表示期望风速为定值时,阴影效应导致的风速相对误差随风向角的变化关系。从图可以看出,风向角较小时,阴影效应显著,因而实际测量的初始风速的整体误差较大,而随着风向角变大,阴影效应变弱,风速的相对误差也呈现出不断减小的趋势,并且误差基本趋近于10%以内。当风速为3 m/s以下时,实际测量的初始风速相对误差偏大,且风速越小误差越大,最大误差超过了-35%;当风速为3 m/s以上时,实际测量的初始风速相对误差基本在-20~-10%之间,随着风速增加相对误差曲线会逼近于一条固定的分布曲线。为了验证上述计算结果的准确性,图8也给出了文献[6,9]中有关超声测风仪阴影效应风洞测试的实验结果,由图8不难发现对于具有相同的L/d(=18)的超声测风仪,本文Fluent模拟仿真的不同风速风向条件下阴影效应产生的风速相对误差与风洞实验测试的阴影效应误差吻合较好,这表明本文用于构建BP神经网络预测模型的样本数据准确可信。
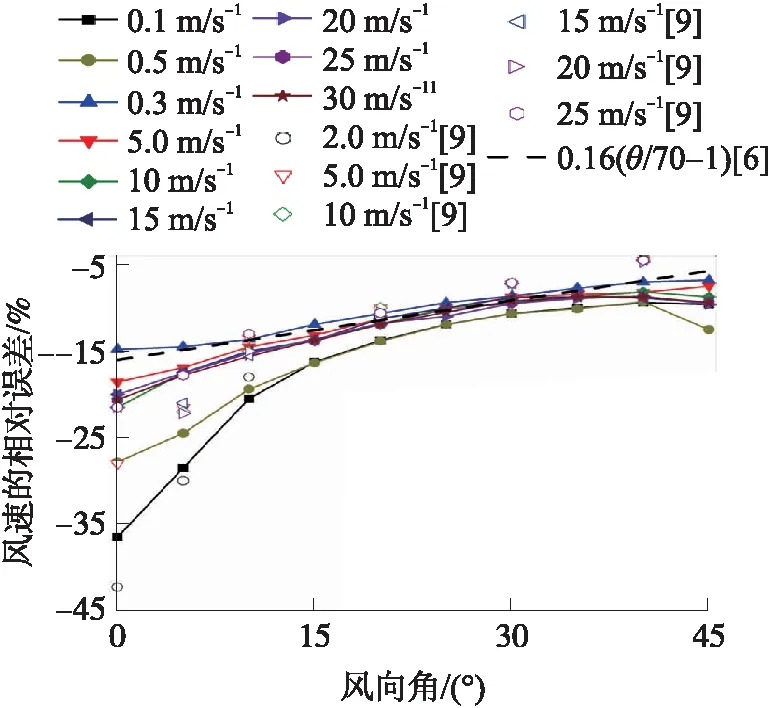
图8 阴影效应导致的风速相对误差随风向角的变化关系
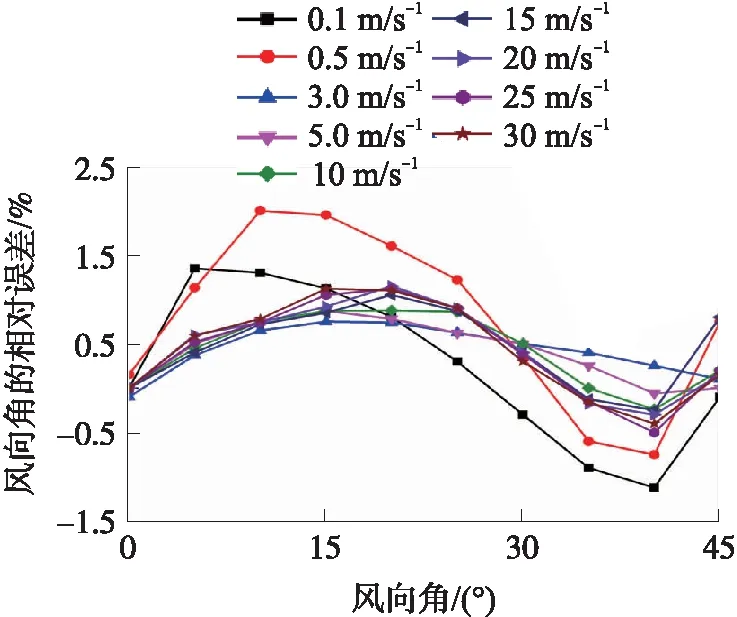
图9 阴影效应导致的风向角误差随风向角的变化关系
如图9所示,曲线族表示期望风速为定值时,风向角相对误差随风向角的变化关系。从图中不难发现,整体上实际测量的风向的相对误差较小,均小于±2%。在0°和45°时,风向角的相对误差甚至接近于零,它与风向角呈现出了近似正弦波的变化关系。此外,风速较大和较小时,实际测量的风向角的相对误差稍微大些。总体而言,阴影效应对超声测风仪风向角的测量影响较小。
图10和图11分别给出了0.1 m/s和30 m/s期望风速时实际测量的初始风速的相对误差与气温的关系曲线。曲线族表示不同的风向角,不难发现,角度越大误差越小,最小误差趋近于10%,而风速变大误差变小。由Fluent仿真结果还可知,气温对风速测量的影响不大,小风向角时风速相对误差的变化最大约为2%,大风向角时变化可忽略。由此可见,气温变化对于超声测风阴影效应误差的影响较小。
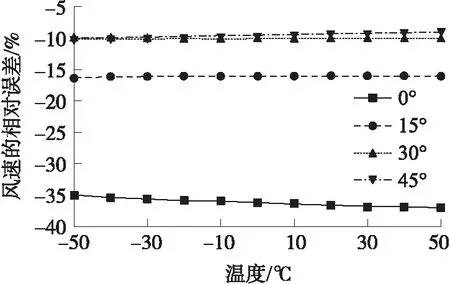
图10 0.1 m/s风速时相对误差与气温的关系曲线
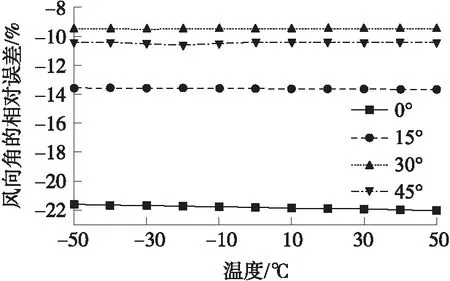
图11 30 m/s风速时相对误差与气温的关系曲线
3 BP神经网络算法修正
3.1 三层拓扑结构的BP神经网络


图12 BP神经网络拓扑结构图

(8)
3.2 BP算法的仿真
根据前面Fluent仿真的结果可知,风速在3 m/s以上和以下时阴影效应的影响差异较大,为了提高BP神经网络算法预测与修正的精度,本文将不同的风速范围做了分段处理,风速范围分为0.1 m/s~3 m/s 与3 m/s~30 m/s两种情况。将实际测量的初始风速、风向和温度作为测量样本输入,将期望风速作为输出,按照上述BP神经网络算法的具体步骤获取的相应权值和阈值分别为:
(9)
(10)
实际测量的初始风速、期望风速和BP神经网络输出的修正风速之间的关系如图13(风速为0.1 m/s~3 m/s时)和图14(风速为3 m/s~30 m/s时)所示,其中横坐标代表数据样本个数,纵坐标代表风速值,圆圈代表BP神经网络预测输出的修正风速,星号代表期望风速,菱形代表实际测量的初始风速,从左至右,每一列代表温度分别为-50 °C~50 °C下3种风速的结果。
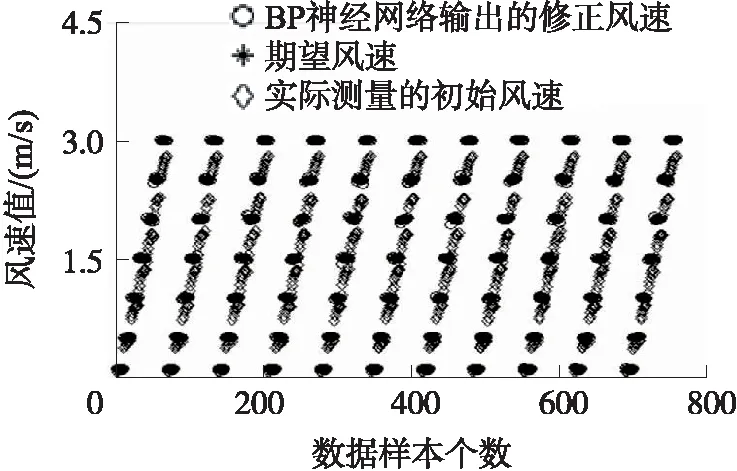
图13 当风速为0.1~3 m/s时,实际测量的初始风速、期望风速和BP神经网络输出的修正风速之间的关系
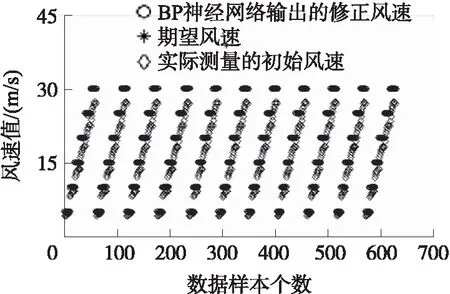
图14 当风速为3 m/s~30 m/s时,实际测量的初始风速、期望风速和BP神经网络输出的修正风速之间的关系
从两幅图中均可以明显看出,圆圈和星号基本重合,菱形受温度和阴影效应的影响而呈斜线分布。该结果表明实际测量的初始风速与期望风速以及BP神经网络的修正风速差异较大,而BP神经网络的修正风速值与期望风速基本相同,说明BP神经网络算法具有修正作用,能有效地削弱超声测风仪阴影效应的影响。以期望风速为标准值,实际测量的初始风速的相对误差和BP神经网络修正风速的相对误差如图15(风速为0.1 m/s~3 m/s时)和图16(风速为3 m/s~30 m/s时)所示,圆圈代表BP神经网络输出的修正风速的相对误差,星号代表实际测量的初始风速的相对误差。从两幅图中均可明显看出,BP神经网络修正风速的相对误差较小,当风速为0.1 m/s~3.0 m/s时,误差基本小于±5%,当风速为3 m/s~30 m/s时,误差基本小于±2%。而实际测量的初始风速的相对误差较大,分别分布在-5%~-40%之间和-8%~-25%之间,由此可见,基于CFD和BP神经网络的修正算法可有效地削弱传感器阴影效应的影响,从而提高了风速测量精度。

图15 当风速为0.1 m/s~3.0 m/s时,实际测量的初始风速的相对误差和BP神经网络修正风速的相对误差之间的对比图
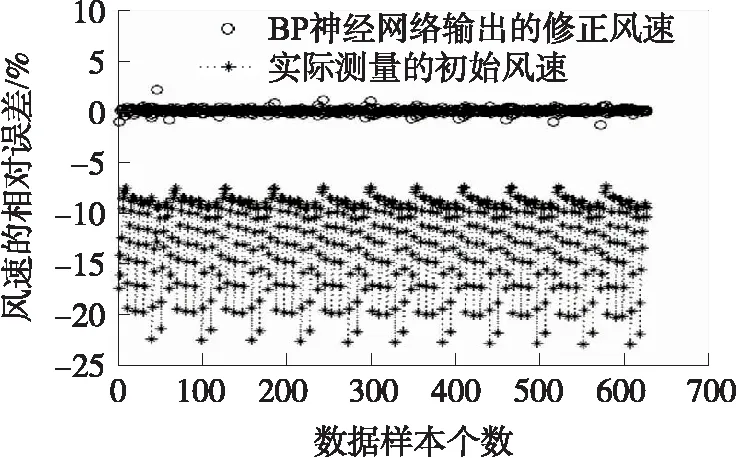
图16 当风速为3 m/s~30 m/s时,实际测量的初始风速的相对误差和BP神经网络修正风速的相对误差之间的对比图
此外,当风向为0~45°时,按照BP神经网络算法具体步骤得出相对应得权值和阈值分别为:

(11)
实际测量的初始风向、期望风向和BP神经网络输出的修正风向之间的关系如图17所示,其中横坐标代表数据样本个数,纵坐标代表风向值,圆圈代表BP神经网络输出的修正风向,叉号代表期望风向,菱形代表实际测量的初始风向,从图17可以看出,圆圈和叉号高度重合,菱形受温度和阴影效应的影响略有分散。实际测量的初始风向分别与期望风向、BP神经网络的修正风向之间略有差距,而BP神经网络修正风向和期望风向之间基本一致,该结果表明BP神经网络修正算法能有效的减小阴影效应对风向的影响。
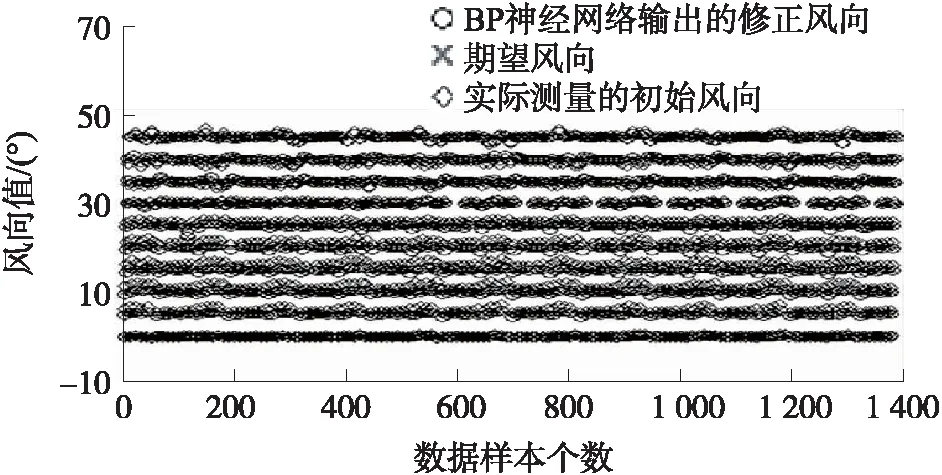
图17 实际测量的初始风向、期望风向和BP神经网络输出的修正风向之间的关系
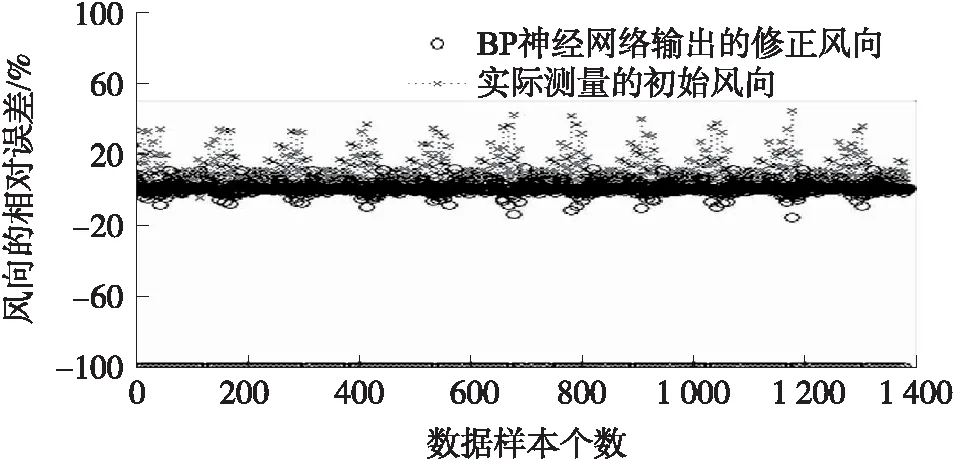
图18 实际测量的初始风向的相对误差和BP神经网络修正风向的相对误差之间对比图
以期望风速为标准值,实际测量的初始风向的相对误差和BP神经网络修正风向的相对误差如图18 所示,圆点代表BP神经网络输出的修正风向的相对误差,叉号代表实际测量的初始风向的相对误差。从图18明显的看出,BP神经网络修正风向的相对误差较小,基本小于-10%,而实际测量的初始风向的相对误差较大,最大误差达到了40%,由此可见,BP神经网络修正算法可以有效的提高风向的测量精度。
综上所述,通过CFD模拟仿真和BP神经网络补偿算法对阴影效应进行修正后,超声测风仪的风速风向的测量精度有了显著的提升,可以满足高精度超声测风的测量需求。
4 补偿方法的实验验证
在上述理论分析与仿真验证的基础上,本文进一步结合文献[9]中超声测风仪风洞实验的测量数据对基于CFD和BP神经网络的阴影效应误差补偿方法的准确性进行了实验验证。超声测风仪的阴影效应与相对的两个探头的距离L以及探头的直径d密切相关[6-10],本文中Fluent模拟仿真的超声测风仪的L/d与文献[9]中的L/d一致,因此该风洞实验的测量数据可以用来验证本文阴影效应补偿方法的准确性。图19给出了不同风速和风向角条件下BP神经网络预测模型对风速阴影效应的修正效果。文献[9]中的超声测风仪由于受到探头阴影效应的影响,风洞中测试的风速实验值偏离了风洞的标准风速,尤其在较小风向角的情况下,偏差更为严重,例如对于2 m/s和25 m/s的标准风速,阴影效应分别导致了1 m/s和5 m/s的风速绝对误差,由此可见阴影效应引起的超声测风测量误差不可忽略。从图19中不难发现,将这些受到了阴影效应影响的风速代入到BP神经网络预测模型进行修正之后,输出的修正风速基本趋于风洞中的标准风速,这表明本文提出的补偿方法显著削弱了探头的阴影效应对风速测量结果的影响,有利于提高超声测风的精度。

图19 不同风速和风向角条件下BP神经网络预测模型对超声测风仪风速阴影效应的修正结果
如图20所示,本文也给出文献[9]中阴影效应导致的风速相对误差和BP神经网络修正后的风速相对误差。由图可知,受到阴影效应影响的风速测量值的整体相对误差在-5%~-45%之间,风向角较小时,误差处于-20%~-45%之间,风向角较大时,误差在-5%~-10%之间。而BP神经网络预测模型给出的风速值的整体相对误差一般在±7%以内。该结果表明本文提出的基于CFD模拟仿真和BP神经网络数据融合的补偿算法是有效的,可以用来提升超声测风仪的测量精度。本文的研究结果对于高精度超声测风仪的研制有一定的参考价值。

图20 不同风速和风向角条件下BP神经网络预测模型修正的风速相对误差与阴影效应导致的风速相对误差对比图
5 结论
鉴于实际测量各种情况下的风速风向来修正超声测风时的阴影效应误差成本很高,而计算流体力学(CFD)又是公认的处理流体风场问题的方法,因此本文采用CFD软件对二维超声测风结构模型的风场分布进行了仿真模拟,着重讨论了影响风速风向测量的阴影效应,分析了不同温度下风速风向测量的相对误差,并且采用BP神经网络算法对风速风向进行了阴影效应误差修正,使之趋近于期望风速风向。仿真实验结果表明BP神经网络修正算法能有效地提高风速风向的测量精度,具有较强的实际应用价值。在理论分析与仿真验证的基础上,本文进一步结合超声测风仪风洞实验的测量数据对基于CFD和BP神经网络的阴影效应误差补偿方法的准确性进行了实验验证,研究结果表明本文提出的BP神经网络预测模型可以明显削弱超声探头阴影效应的影响,从而有效提升了超声测风仪的测量精度。
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
文苑(2020年11期)2020-11-19
法律方法(2019年4期)2019-11-16
中国诗歌(2019年6期)2019-11-15
中国诗歌(2018年6期)2018-11-14
物流技术与应用(2017年12期)2018-01-31
摄影之友(影像视觉)(2017年1期)2017-07-18
中学生数理化·八年级物理人教版(2017年11期)2017-04-18
数学大王·中高年级(2016年4期)2016-05-14