
基于压力反馈型薄壁类零件夹持机械手的设计
2018-08-30 09:34牟士壮陈晓杰
装备制造技术 2018年7期
郭 茜,牟士壮,陈晓杰
(江苏联合职业技术学院无锡立信分院电气工程系,江苏 无锡214000)
在传统机械制造行业中,基于舵机的小型夹持类机械手(臂),其控制方式主要为程序直接控制,或通过上位机与单片机通信,通过人体各感官进行主观控制,这些控制方式不能很好的适应各类材质特点,缺点比较明显[1]。例如,一辆可移动式机械手小车夹持一苹果从A点运送至B点,那么在夹持过程中如果夹持力度控制不好,苹果就会造成损伤。如果有压力反馈环节,那么就能根据苹果特性,设置夹持力度,并实时反馈,避免运送途中损伤苹果[2]。
基于压力反馈型薄壁类零件夹持机械手是面向生活、娱乐、工业等领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和压力传感器反馈数据控制能力来实现各种功能的一种机器,其属于机械行业和高端装备制造行业[3]。
1 基于压力反馈型薄壁类零件夹持机械手的设计
从实现功能角度出发,本作品在设计过程中主要应该考虑以下两点:夹持功能及压力反馈功能。能够实现夹持功能的机械结构形式比较多,起初设计的结构为半齿轮啮合四杆爪型机械手,该结构易实现抓取动作,传动效率高,但是压力反馈效果不佳,后期经多次试验后依然无法完全解决该问题,遂舍弃并改用双舵机四杆结构。双舵机四杆机械手张合尺寸较大,能够很好地适应不同规格被抓取物,并且能够均匀传递压力进行闭环控制,其内部结构如图1所示。
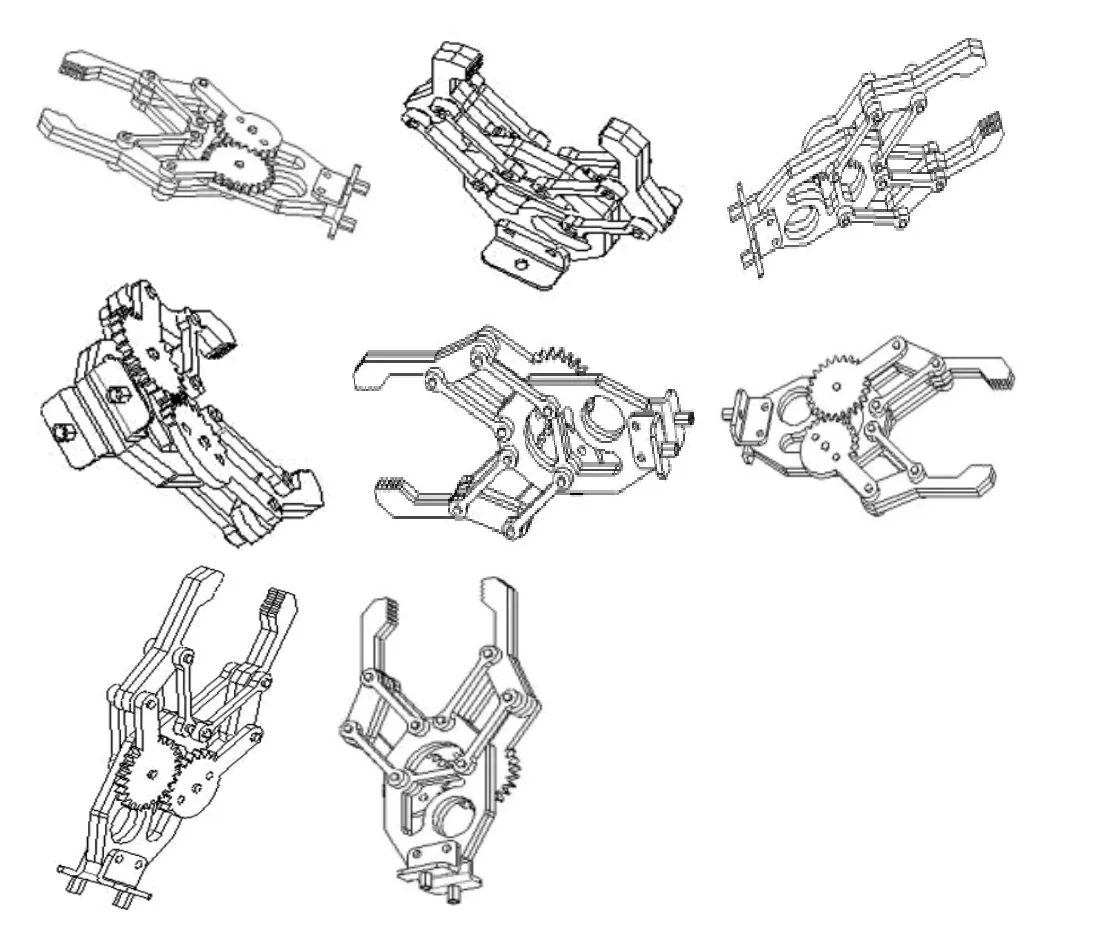
图1 基于压力反馈型薄壁类零件夹持机械手的内部结构图
基于压力反馈型薄壁类零件夹持机械手的基本原理为:本机械装置由舵机(MG995)组成多个关节,自由度高;通过压力传感器(FSR402)检测对夹持物所施加的压力,根据不同材质的特性,设定不同范围的压力数值,确保被夹持物不被损坏、变形;通过单片机(Arduino)采集信息,处理后与舵机控制板(STM32系列16路)进行通信,控制舵机动作,确保顺利完成任务。
该装置在制作及实验过程中的难点包括:
(1)机械结构制作中需要根据现有钳工实训设备进行加工,加工精度、装配精度难度大;
(2)该实验需要多个MG995,驱动多个舵机时需要专门舵机控制板,单片机与舵机控制板通信、控制程序对学生有所挑战;
(3)FSR402压力传感器采集系信息时所测压力精确度不高,如何处理会对使用者造成困扰。
基于以上难点,在设计和制作过程中采取了以下措施:
一是,根据图纸要求精确制作,对钳加工难以胜任的,根据图纸进行相应优化,尽量减少零件制作数量;
二是,对舵机控制板通信方式以及控制代码进行解析研究,确保顺利控制;
三是,利用示波软件,研究压力与电压信号线性关系。
根据以上分析,基于压力反馈型薄壁类零件夹持机械手的设计图如图2所示。

图2 基于压力反馈型薄壁类零件夹持机械手的设计图
根据设计图纸,制造出基于压力反馈型薄壁类零件夹持机械手的实物如图3所示。

图3 基于压力反馈型薄壁类零件夹持机械手的实物图
2 基于压力反馈型薄壁类零件夹持机械手的工作过程
基于压力反馈型薄壁类零件夹持机械手的工作过程如下,见图4所示。
(1)根据被夹持物材质及特点,比对实验参数,设定最佳夹持力范围。
(2)根据机械手及被夹持物相对位置,驱动机械臂,使机械手到达相应位置。
(3)机械手开始夹紧,压力传感器同时检测,达到最佳压力值时停止动作。
(4)将被夹持物放至制定点,恢复原来状态。

图4 基于压力反馈型薄壁类零件夹持机械手的工作过程
3 基于压力反馈型薄壁类零件夹持机械手的创新点
根据国内外研究现状及相关文献表明:虽然有基于压力反馈的电液伺服驱动系统,但经过详细比对,无论是设计原理,还是装置结构,亦或是驱动单元等与本装置均有明显区别[4]。基于压力反馈型薄壁类零件夹持机械手的创新点主要有:
(1)本设计更趋向于轻量化、应用化,移动方便快捷。
(2)本设计通过压力传感器(FSR402)采集夹持力,传回单片机后与设定夹持力进行比较,作出相应动作,从而对夹持过程实现闭环控制,见图5.

图5 基于压力反馈型薄壁类零件夹持机械手的创新点
根据以上分析可知,基于压力反馈型薄壁类零件夹持机械手具有创新性。
4 结论
基于压力反馈型薄壁类零件夹持机械手是靠自身动力和压力传感器反馈数据控制能力来实现各种功能的一种机器,在日常生活、工业等诸多领域中具有广泛的用途[5]。在后续的使用和研究过程中,还可以做以下进一步改进,以提高装置的适应性。
(1)添加旋转编码器,对压力传感器控压范围进行调节。
(2)添加HC-05蓝牙,实现上位机与单片机、舵机控制板交互控制。
(3)安装履带式可移动底盘,实现机械手臂移动操作。
猜你喜欢
汽车工程(2021年12期)2021-03-08
模具制造(2019年7期)2019-09-25
自动化学报(2019年6期)2019-07-23
电子制作(2019年23期)2019-02-23
电子制作(2018年1期)2018-04-04
教育教学论坛(2017年34期)2017-08-30
制造业自动化(2017年2期)2017-03-20
火控雷达技术(2016年2期)2016-02-06
凿岩机械气动工具(2015年3期)2015-11-11
舰船科学技术(2015年8期)2015-02-27
