
基于北斗GEO卫星双频观测值连续监测电离层延迟
2018-08-30 06:02:56赵坤娟杨旭海杨海彦闫温合李伟超
宇航计测技术 2018年4期
赵坤娟 杨旭海 杨海彦 闫温合 李伟超
(1. 中国科学院国家授时中心,西安710600;2. 中国科学院精密导航定位与定时技术重点实验室,西安710600;3. 中国科学院大学,北京100039)
1 引 言
电离层延迟是PNT中不可忽视的误差之一,研究电离层对提高卫星导航定位系统精度意义重大。纵观国内外众多学者有关电离层的研究,有很多是基于GPS系统并采用模型的电离层监测和反演以及太阳风暴对电离层的影响问题,但由于GPS卫星的运动特性,卫星的穿刺点运动速度有每秒上百米的量级,观测到的TEC同时随时间和空间变化,不能通过观测数据直接给出固定穿刺点电离层随时间的变化特性,加上通过建模和数据差值的方法解算固定穿刺点的VTEC时一定会引入模型误差和差值计算误差,尤其在太阳活动剧烈时电离层异常响应存在较大的误差[1]。
而随着中国北斗系统卫星导航系统的不断发展和完善,其系统监测站接收机对应GEO卫星的穿刺点位置基本保持不变,从而所观测到的TEC仅随时间变化,目前北斗系统卫星导航在轨GEO卫星有五颗,信号采用三个频点工作,可以利用伪距双频组差方法解算电离层电子含量,为实时监视中国区域电离层变化提供新的技术手段[2]。通过国内的监测接收机可以获得VTEC的空间分布,并且从系统中可以得到连续观测的GEO卫星的双频观测数据,这样采用双频码伪距观测值和双频载波相位观测值数据直接解算的固定穿刺点上的VTEC值是一种较理想的方法[3]。
2 原理和算法
2.1 北斗系统双频观测值的选取
在北斗系统卫星导航系统中,分别有三种信号频率B1、B2和B3的观测值,可以利用双频组合方法解算电离层电子含量,为实时监视中国区域电离层变化提供新的技术手段。文章关注其中GEO卫星的码伪距和载波相位观测值,对应如下公式(1)和(2)的观测方程,其中S为卫星至接收机间的几何距离,R为伪距,λ(φ+N)载波相位测得的距离(其中λ为波长、φ为载波相位观测量、N为整周模糊度),下标i根据不同频率分别取1、2、3,δ为非电离层延迟误差的组合,与频率f无关,b分别为北斗系统不同频率的硬件延迟偏差(包括卫星端和接收机端硬件延迟),由于载波相位观测中同时存在硬件延迟偏差和整周模糊度,且硬件延迟偏差和整周模糊度无法分离,故将两者合二为一,方程中只体现整周模糊度[4]。
(1)
(2)
若利用北斗系统双频观测值计算电离层延迟TEC会有三种组合方式,分别为B1&B2,B1&B3和B2&B3组合。公式(3)分别是利用双频伪距观测值和双频载波相位观测值来测定电离层延迟TEC的方程
(3)
如上不同双频组合测定TEC时有不同的转换系数,B1&B3和B2&B3的转换系数都大于B1&B2的转换系数,根据误差传播定律,转换系数越大将使TEC计算误差越大,因此选择B1&B2双频组合来计算TEC为最优的[5]。
2.2 双频观测值计算电离层延迟难点
根据上文可知,利用双频码伪距观测值计算电离层延迟的关键在于确定硬件延迟偏差(含卫星端和接收机端硬件延迟,如图1所示),利用双频载波相位观测值计算电离层延迟的关键在于整周模糊度的解算。
那么如何确定双频码伪距观测值硬件延迟偏差?通常有仪器检验法:卫星端电路延迟由导航电文中参数TGD给出,接收机端硬件延迟进行专项检验来测定。另一种视硬件延迟为待估参数引入观测方程,通过平差计算把电离层模型的系数和这些偏差参数一并解出。
如何解算双频载波相位观测值整周模糊度呢?一般把整周模糊度视为待定未知参数,与其他未知参数一起采用最小二乘解算,一站一星对应一个模糊度参数,当出现周跳后,还需要引进新的模糊度参数。当采用多星多站数据求定电离层延迟时,待估模糊度参数的数目会很多,不仅会增加计算机的计算负担,还会引起对电离层延迟估计精度的衰减。在这种情况下,需要估计的参数个数和真正对电离层延迟起作用的参数数目间比例关系将显得失调[6]。
2.3 组合观测值平滑方法
在电离层TEC实际计算过程中,利用IGS MGEX公布的bias文件来扣除双频码伪距的硬件延迟后,得到的TEC计算结果含有相对较大的噪声,这主要是观测值中无法模型化的噪声(主要是多路径效应)引起的,而和码伪距观测值相比,载波相位观测值的噪声和多路径效应影响要小得多。因此,为了提高码伪距观测值的精度,结合观测值各自的优点,考虑采用相位平滑伪距的方法来消除码伪距观测噪声和多路径效应影响。
根据B1&B2双频码伪距及载波相位观测方程构建无几何组合观测量P4和L4如公式(4)和公式(5)
(4)
(5)
由式(5)减去式(4)可得到
L4-P4=2Δb12+(λ1N1-λ2N2)
(6)
式中字母和前面的描述一致,根据前后历元L4-P4的差值进行周跳探测,若差值超过0.5m,则认为发生周跳,统计未发生周跳时段内的L4-P4均值作为组合模糊度,即
(7)
由此可以得到相位平滑伪距后的电离层观测量,如公式(8)所示:
(8)
3 GEO卫星的优势所在
目前北斗系统在轨工作有五颗GEO卫星,分布在赤道上空的定点位置,其相对地面静止的特性,使得系统监测站接收机对应GEO卫星的穿刺点位置基本保持不变,可实现对固定穿刺点电离层连续不间断的监测。图2是按照实际比例画的给定地面点(西安附近30°N,110.5°E)和GEO卫星(C03,定点经度110.5°E)的位置关系,可以直观的感受到GEO卫星对地静止,可持续观测的特点。
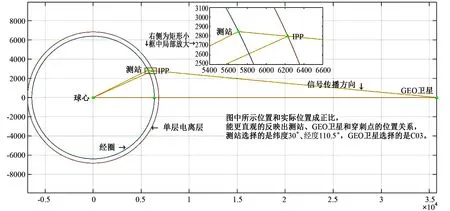
图2 实际比例画的给定地面站和GEO卫星的位置关系Fig.2 Ubiety drawn in real proportion between the given station and the GEO satellite
图3反映的是监测站观测北斗系统卫星的可见性情况。从图中可以看出,北斗系统的五颗GEO卫星一天中连续可见,而其他卫星(IGSO和MEO卫星)在一天中的可见性是间断的,有的卫星一天中只能有约8小时可见,监测站处于不同位置所观测到的卫星也不同,因此,和其他卫星相比较GEO卫星具有可连续性观测的突出优势。

图3 监测站对北斗系统卫星观测的可见性情况Fig.3 BDS satellites visibility of monitoring station
图4是在位于32°S,115°E的跟踪站观测一天中GEO卫星和其他卫星穿刺点变化情况的对比图,从图中可以看出,五颗GEO卫星的穿刺点在一天之中的变化量很小,加之电离层在空间和时间上的变化属于慢变化,可认为GEO卫星的穿刺点相对地球是固定不变的。而其他卫星由于不具备相对地球静止运动的这一特性,在观测站观测时穿刺点是不断变化的,并且变化量不小,这就使得计算电离层延迟时需要同时考虑时间和空间两个维度的变化情况。
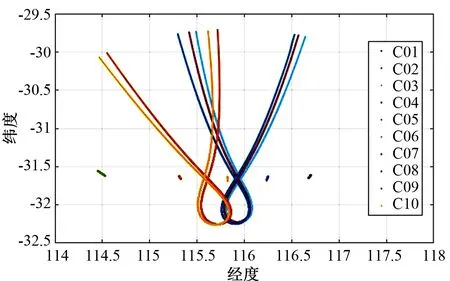
图4 GEO卫星和其他卫星穿刺点的变化情况Fig.4 Variation of BDS satellites Ionospheric Pierce Point
4 双频观测值仿真结果及其分析
由于利用双频伪距观测值计算电离层延迟有硬件延迟和无法模型化的噪声影响,在没有扣除这些影响的情况下,计算出来的结果只能在趋势上体现正确性,要利用该结果对导航定位结果进行修正是行不通的,不能得到定量分析。就一般的接收机硬件水平而言,载波相位分离出来的电离层延迟量的噪声水平要比码伪距低2~3个数量级。

图5 没有顾及硬件延迟偏差利用双频码伪距观测值计算的电离层延迟Fig.5 Using dual frequency pseudo-range observations calculated ionospheric delay without considering TGD and IFB

图6 没有顾及硬件延迟偏差利用双频载波相位观测值计算的电离层延迟Fig.6 Using dual frequencyCarrier phase observations calculated ionospheric delay without considering TGD and IFB
在没有顾及硬件延迟偏差和噪声的情况下,利用双频观测值计算的电离层延迟结果不理想。图5是利用双频码伪距观测值计算的电离层延迟结果,可以看到受噪声影响计算的结果呈现为很多杂乱的散点;图6是利用双频载波相位观测值计算的电离层延迟结果,趋势和图5一致,需要扣除相应噪声后,才可以得到有效的电离层延迟结果。
图7是采用几何无关组合的方法,利用载波相位消除码伪距观测值相应的噪声,并扣除硬件延迟后所得到的结果。本算例所用的观测资料是位于32°S,115°E的跟踪站观测五颗GEO卫星的双频载波相位和码伪距观测值。在跟踪站确定的情况下,观测五颗GEO卫星的穿刺点变化相差不大,而电离层在时间和空间的变化又相对是慢变化,因此图7中五颗GEO卫星的电离层延迟结果趋势接近,一天中电离层活跃时TEC最大相差10TECU。

图7 GEO卫星双频观测值计算的电离层延迟Fig.7 Using GEO satellites dual frequencyobservations calculated ionospheric delay
IGS官网提供的格网电离层产品GIM(Global Ionosphere Maps)已经服务了很多年,其正确性是普遍接受的。图8为利用上文方法计算结果和GIM提供结果的对比,通过图8的结果可以说明方法的正确性。GIM中最终精密电离层产品(igsg)的精度是IGS电离层产品中最高的,它是综合了IGS全球跟踪站数据,由多个数据分析中心经过数学模型和加权得到的结果。然而其产品在计算过程中引入了模型误差,产品RMS值最大的超过120,证明其结果具有很大的离散度,发布时间滞后最少10天,每一个格网点每天给出13个TEC值,这些反映出IGS电离层产品在连续性、准实时性、精度等方面的不足,无法满足现下技术发展对电离层产品越来越高的要求。因此,图8中差值有点大的原因初步断定是GIM精度不太高引起的。
图9~图12实例中所用的观测资料是2014年位于南半球32°S,115°E跟踪站观测五颗GEO卫星的双频载波相位和码伪距观测值,采样率为30秒,分别计算了年积日111~117、196~202、281~287、347~353四周的电离层延迟结果,从图中可以初步反映出不同季节条件下监测电离层延迟的情况,图中有卫星表现出个别异常情况,是由于数据缺失引起的。综上所述,利用北斗系统GEO卫星双频实测数据计算电离层延迟在连续性、准实时性、精度等方面都优于IGS格网电离层产品。

图10 GEO卫星连续一周电离层监测情况(2)Fig.10Continuous monitoring ionosphere of GEO satellites in one week (2)

图11 GEO卫星连续一周电离层监测情况(3)Fig.11 Continuous monitoring ionosphere of GEO satellites in one week (3)

图12 GEO卫星连续一周电离层监测情况(4)Fig.12 Continuous monitoring ionosphere of GEO satellites in one week (4)
5 结束语
文章确定了利用北斗系统双频观测值计算电离层延迟最优的组合为B1&B2;B1&B3组合计算的结果稍微差一点,可利用B1&B3组合辅助验证B1&B2组合的结果,B2&B3组合效果最差,主要原因是频率越接近计算效果越差。利用北斗系统GEO卫星静地特性监测电离层时可以只考虑时间变化,和IGS组织公布的电离层产品比较,北斗系统GEO卫星的连续观测可以得到连续的电离层延迟;穿刺点固定的情况下,双频观测值计算的电离层精度更高。基于北斗系统观测数据,实现对中国区域电离层实时有效监测,有利于及时、准确掌握电离层活动情况,具有重要意义。
猜你喜欢
空间科学学报(2021年4期)2021-08-30 08:31:16
空间科学学报(2021年2期)2021-07-21 08:43:28
测绘科学与工程(2017年3期)2017-08-16 02:46:08
雷达学报(2017年6期)2017-03-26 07:53:02
测绘通报(2016年12期)2017-01-06 03:37:13
西部广播电视(2015年10期)2016-01-18 04:01:45
导航定位学报(2015年2期)2015-06-05 09:27:38
导航定位学报(2015年2期)2015-06-05 09:27:34
电测与仪表(2014年15期)2014-04-04 12:05:32
华东理工大学学报(自然科学版)(2014年2期)2014-02-27 13:48:49
